фиг.1
Изобретение относится к машиностроению, а именно к промышленным роботам и манипуляторам, предназначенным для проведения различных технологических операций с деталями, например с цилинд- рическими прижимами сжатия.
Цель изобретения - повышение надежности захвата цилиндрических пружин.
На фиг.1 изображена принципиальная схема устройства в положении захвата не- нагруженной пружины; на фиг,2 - то же, в положении, когда пружина сжата, фиксирована и исключается потеря устойчивости пружины; на фиг.З - то же, в положении, когда пружина с определенным натягом ус- танавливается в сборочный узел; на фиг.4 - разрез А-А на фиг. 1.
Захватное устройство содержит корпус 1 с приводом (не показан) линейного перемещения основных захватных рычагов 2 и 3, в которых выполнены пазы 4. Между основными захватными рычагами 2 и 3 на корпусе 1 смонтирован дополнительный рычажный фиксирующий схват, содержащий шарнир- но соединенные между собой губки 5 и 6 со скосами, подпружиненные относительно одна другой пружиной 7. К губкам 5 и 6 с помощью винта присоединены пластины 8 и 9, предназначенные для регулировки ширины раскрытия губок. Захватное устройст- во предназначено для захвата деталей, например цилиндрических пружин 10, и установки их в узел 11 сборки.
Захватное устройство работает следующим образом.
Захватное устройство опускается на ненагруженную пружину, в большинстве случае захватываемый виток пружины располагается произвольным образом по отношению к губкам 5 и 6 фиксирующего схвата, поэтому в экстремальном варианте, когда при опускании схвата губка упирается в виток, захватное.устройство продолжает
опускаться вниз, при этом происходит поворот губки и она входит между витками (фиг. 1), После этого захватные рычаги 2 и 3 начинают сжимать пружину 10 с торцов. Это усилие, передаваемое витками пружины к губкам 5 и 6, закрывает их и этим исключает потерю устойчивости пружины (фиг.2).
Сжатую и зафиксированную пружину промышленный робот переносит и устанавливает между буртиками сборочного узла 11, где должна быть установлена пружина. Наличие паза 4 позволяет устанавливать пружины на буртик сборочного узла 11, имеющего лыски. Ширина раскрытия губок 5 и б осуществляется при повороте пластинок 8 и 9 вокруг оси винта (не показан), а фиксация их положения осуществляется также посредством этого винта. При згом ширина раскрытия губок устанавливается так, что при раскрытии захватных рычагов 2 и 3 губки 5 и 6 раскрываются и освобождают виток пружины. После этого захватное устройство удаляется от узла сборки.
Формула изобретения
1.Захватное устройство, содержащее корпус, расположенный Б нем привод и связанные с ним зажимные рычаг и, имеющие плос опараллельные перемещения, о т- л имеющееся гем, что, с целью захвата цилиндрических пружин, оно снабжено дополнительным рычажным схватом, расположенным на корпусе между основными захватными рычагами и выполненным в виде подпружиненных относительно одна другой губок со скосами на торцах, имеющих возможность регулировки ширины раскрытия посредством дополнительно смонтированных на губках пластин.
2.Устройство по п.1, о т л и ч а ю щ е е- с я тем, что на каждом зажимном рычаге выполнен паз, ось симметрии которого совпадает с продольной осью зажимного рычага.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 2023 |
|
RU2813251C1 |
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| Кистевой узел манипулятора | 1990 |
|
SU1712142A1 |
| Схват манипулятора | 1988 |
|
SU1618646A1 |
| Захват промышленного робота | 1985 |
|
SU1313705A1 |
| Схват промышленного робота | 1985 |
|
SU1328191A1 |
| Схват манипулятора | 1990 |
|
SU1801739A1 |
| Схват манипулятора | 1987 |
|
SU1492495A1 |
| Манипулятор | 1986 |
|
SU1430257A1 |
| Захватное устройство | 1982 |
|
SU1007973A1 |

Изобретение относится к машиностроению, а именно к промышленным роботам и манипуляторам. Цель изобретения - повышение надежности захвата цилиндрических пружин. Захватное устройство содержит, кроме основных захватных рычагов 2 и 3, дополнительный рычажный фиксирующий схват, содержащий губки 5 и 6, подпружиненные относительно одна другой пружиной 10 Губки 5 и 6 имеют возможность регулировки ширины раскрытия. Устройство осуществляет захват цилиндрических пружин 10 и установку их в сжатом состоянии в узел сборки. 1 з.п. ф-лы, 4 ил,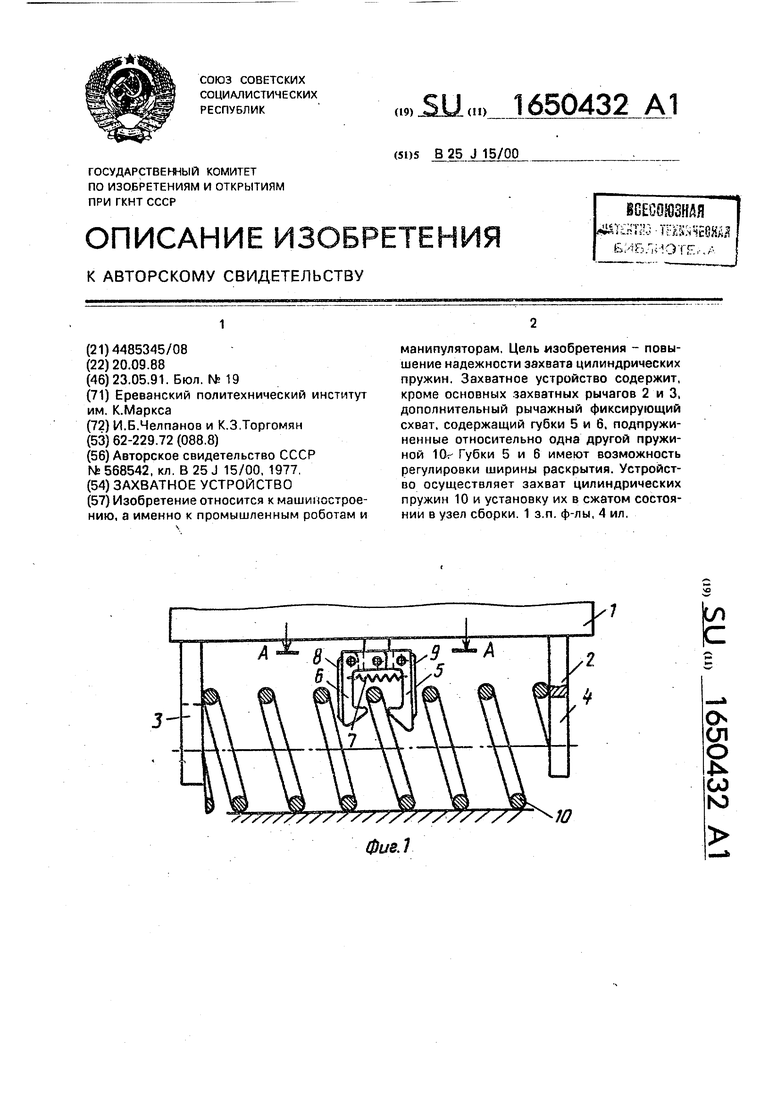
Фиг. 1
Фиг.З
| Захват | 1976 |
|
SU568542A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
