(54) СЖАТ МАНИПУЛЯТОРА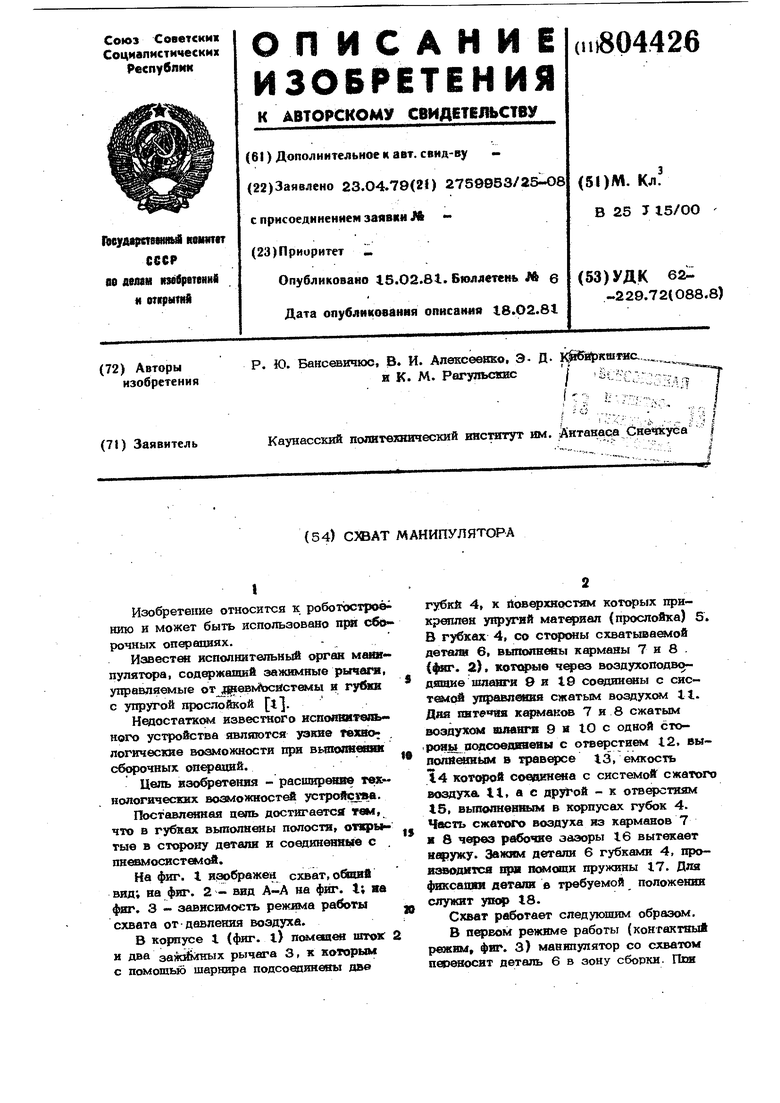
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный схват | 1986 |
|
SU1395480A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Схват промышленного робота | 1984 |
|
SU1255426A1 |
| Манипулятор | 1979 |
|
SU823118A1 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
| Устройство для сборки деталей | 1977 |
|
SU663525A1 |
| Схват манипулятора | 1981 |
|
SU982901A1 |
| Кистевой узел манипулятора | 1990 |
|
SU1712142A1 |
| Манипулятор | 1986 |
|
SU1430257A1 |
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
I
Изобретение относится к роботост юе иию и может быть использовано п{Я1 сбо рочных операциях.Известен исполнительный сфган Mttimпулятора, сод жашнй зажимные рычать, управляемые от :ревк Ьсвстемы и гу(йш с упругой прослойкой t.
Недостатк 1 известного испоявитеш ного устройства явл гются узкие техвсн логические возможности при вьшопйвша сборочных операций.
Цель изобретения - расширение технологических возможностей устройства.
Поставленная цепь достигается тем, что в губках выполнены полости, опфь тые в детали и соединенные с пневмосистемой.
На фиг. t И 3рбражен схват, общий вид; на фиг. 2 - вид А-А на фиг. t; на 4яг. 3 - зависимость режима работы охвата от-давления воздуха.
В Koimyce 1 (фиг. t) помещу шток 2 и два эаяоблных рычага 3, к которым с помошь1о шарнира подсоединены две
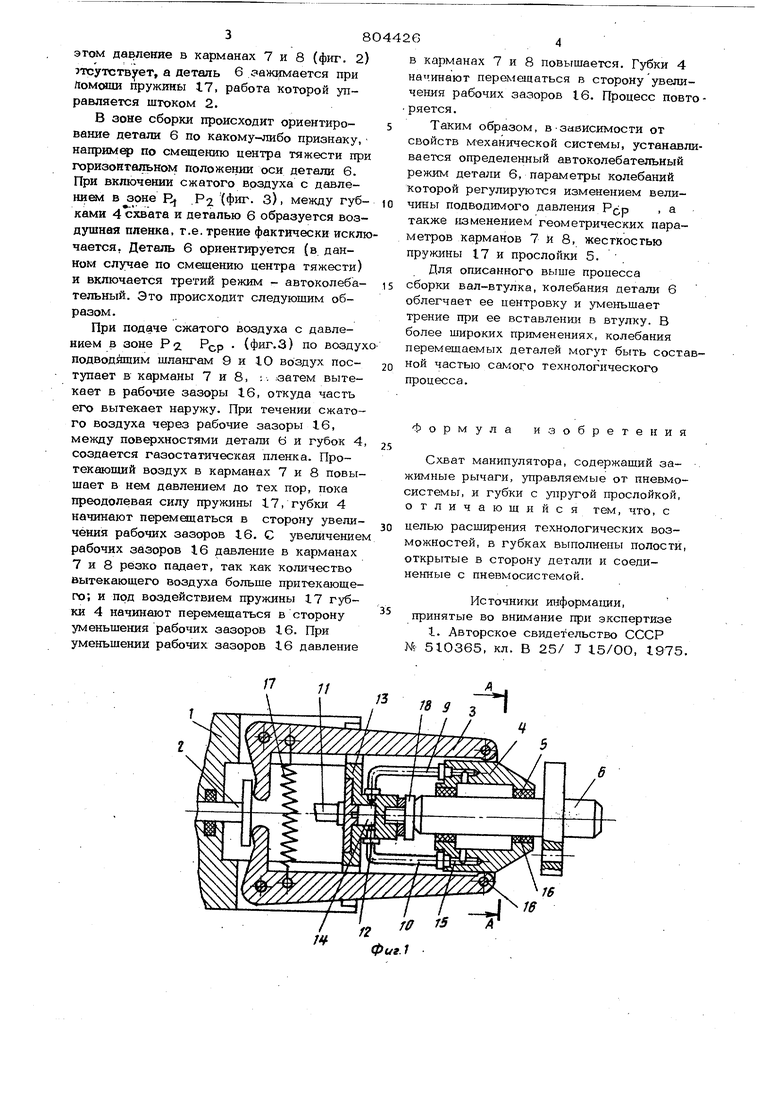
губки 4, к йов хностям которых прикрет1лен упругий материал (прослойка) 5. В губках 4, со crtfpoabi схватываемой яеееат 6, выпопневы карманы 7 и 8 . (фяг. 2), воздухоподводяиие шланги 9 и 19 соединшы с системой управл шя сжатым воздухе ttД1Ш инте« йя 7 и 8 сжатым воздухом шдангв 9 и tO с одной сто poHju (х едиаввы с отверстием 12, вытмшеиным в траверсе t3,-емкость 14 которой соединена с системе сжатого воздуха tt, а с - к отверстизхм tS, выполненшля в корпусах губок 4. Часть сжатого воздуха из карманов 7 и 8 рабочие зазоры 16 вытекает наружу. Зажим детали 6 губками 4, проВЗВ01ШТСЯ фв помощи пружины 17. Для фиксация детали в требуемой положении служит укф 18.
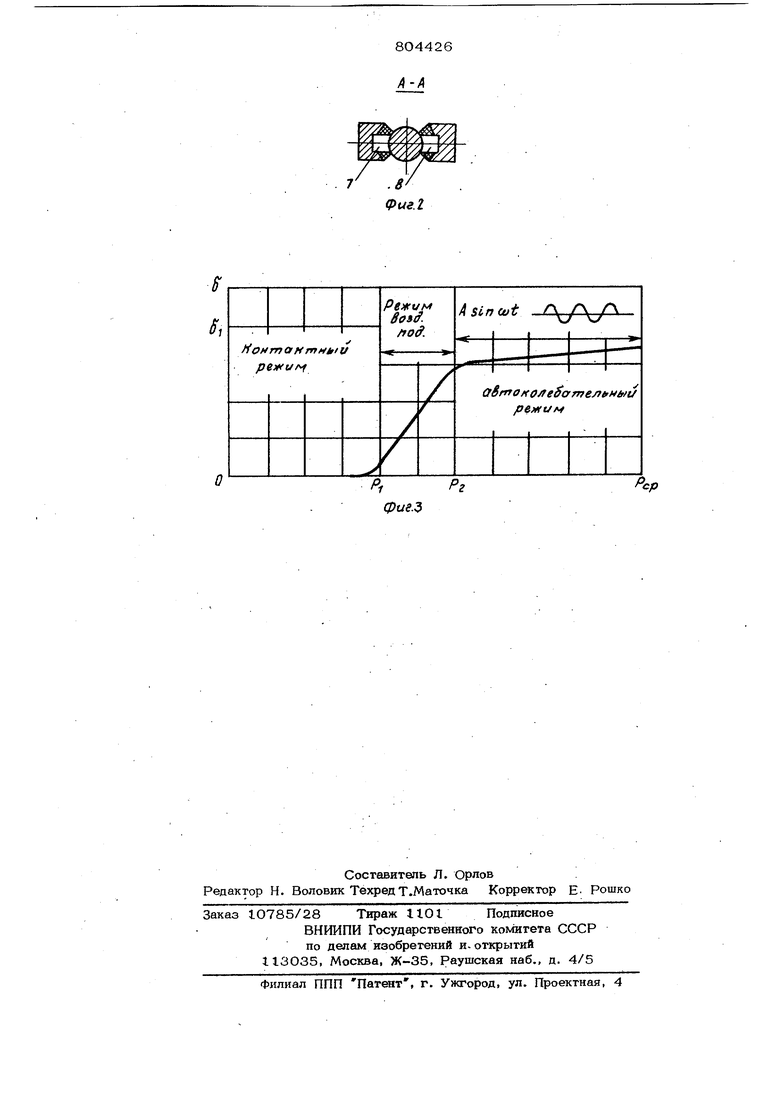
Схват работает следуюпшм образом. В первом режиме работы (контактный режим, фиг. З) манипулятор со схватом переносит деталь 6 в зону сборки. Пси 38О этом давление в карманах 7 и 8 (фиг, 2) отсутствует, а деталь 6 зажимается при /1ОМСЯ1Ш пружины 17, работа которой управляется штоком 2. В зоне сборки происходит ориентирование детали 6 по какому- пибо признаку, наприм по смещению центра тяжести при горизонтальном положении оси детали 6. При включении сжатого воздуха с давлеая&л Rj Р- (Фиг. З), между губками 4 схвата и деталью 6 образуется воздушная пленка, т.е. трение фактически исклю чается. Деталь 6 ориентируется (в данном случае по смещению центра тяжести) и включается третий режим - автоколеба- is
тельный. Это происходит следующим образом.
При подаче сжатого воздуха с давлением в зоне Р РСР (Фиг.З) по воздухподводйшим шлангам 9 и 10 воздух поступает в карманы 7 и 8, ;. .затем вытекает в рабочие зазоры 16, откуда часть его вытекает наружу. При течении сжатого воздуха через рабочие зазоры 16, между поверхностями детали Ъ и губок 4 создается газостатическая пленка. Протекающий воздух в карманах 7 и 8 повышает в нем давлением до тех пор, пока преодолевая силу пружины 17, губки 4 начинают перемещаться в сторону увеличения рабочих зазоров 16. С увеличение рабочих зазоров 16 давление в карманах 7 и 8 резко падает, так как количество вытекающего воздуха больше притекающего; и под воздействием пружины 17 губки 4 начинают перемещаться в сторону уменьшения рабочих зазоров 16. При уменьшении рабочих зазоров 16 давление
I ГО 15 /}
л t
облегчает ее центровку и уменьшает трение при ее вставлении в втулку. В более широких применениях, колебания перемещаемых деталей могут быть составной частью самого технологического процесса.
Формула изобретения
Схват манипулятора, содержащий зажшлные рычаги, управляемые от пневмосистемы, и губки с упругой прослойкой, отличающи йся тем, что, с целью расширения технологических возможностей, в губках выполнены полости, открытые в сторону детали и соединенные с пневмосистемой.
ИСТОЧНИ1Ш информации, принятые во внимание при экспертизе
I. Авторское свидетельство СССР М 510365, кл. В 25/ J 15/ОО, 1975.
i
/5
fff фиг. I 6 в карманах 7 и 8 повышается. Губки 4 начинают перемешаться в сторону увеличения рабочих зазоров 16. Процесс повторяется. Таким образом, в зависимости от свойств м-еханической системы, устанавливается определенный автоколебательный режим детали 6, параметры колебаний Которой регулируются изменением величины подводимого давления Р(р , а также изменением геометрических параметров карманов 7 И 8, жесткостью пружины 17 и прослойки 5. . Для описанного выше процесса сборки вал-втулка, колебания детали 6
PIРг
-ся
фие.
