(54) СХВАТ МАНИПУЛЯТОРА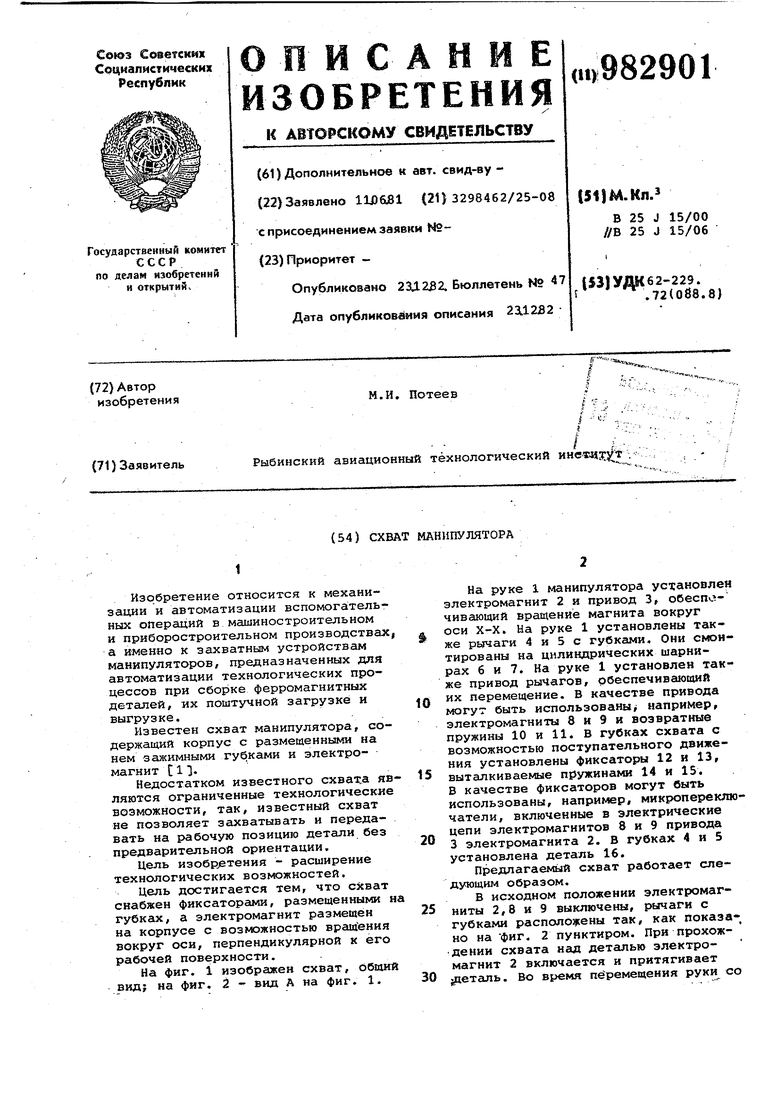
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1982 |
|
SU1042993A1 |
| Манипулятор | 1986 |
|
SU1430257A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Схват манипулятора | 1981 |
|
SU965655A1 |
| Схват манипулятора | 1982 |
|
SU1061988A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Захват манипулятора | 1986 |
|
SU1399115A1 |
| Схват манипулятора | 1987 |
|
SU1470500A1 |
| Схват | 1983 |
|
SU1098790A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
Изобретение относится к механизации и автоматизации вспомога тельных операций в машиностроительном и приборостроительном производствах а именно к захватным устройствам манипуляторов, предназначенных для автоматизации технологических процессов при сборке ферромагнитных деталей, их поштучной загрузке и выгрузке.
Известен схват манипулятора, содержащий корпус с размещенными на нем зажимными губками и электромагнит С .
Недостатком известного схватка являются ограниченные технологические возможности, так, известный схват не позволяет захватывать и передавать на рабочую позицию детали без предварительной ориентации.
Цель изобретения - расширение технологических возможностей.
Цель достигается тем, что схват снабжен фиксаторами, размещенными на губках, а электромагнит размешен на корпусе с возможностью врашения вокруг оси, перпендикулярной к его рабочей поверхности.
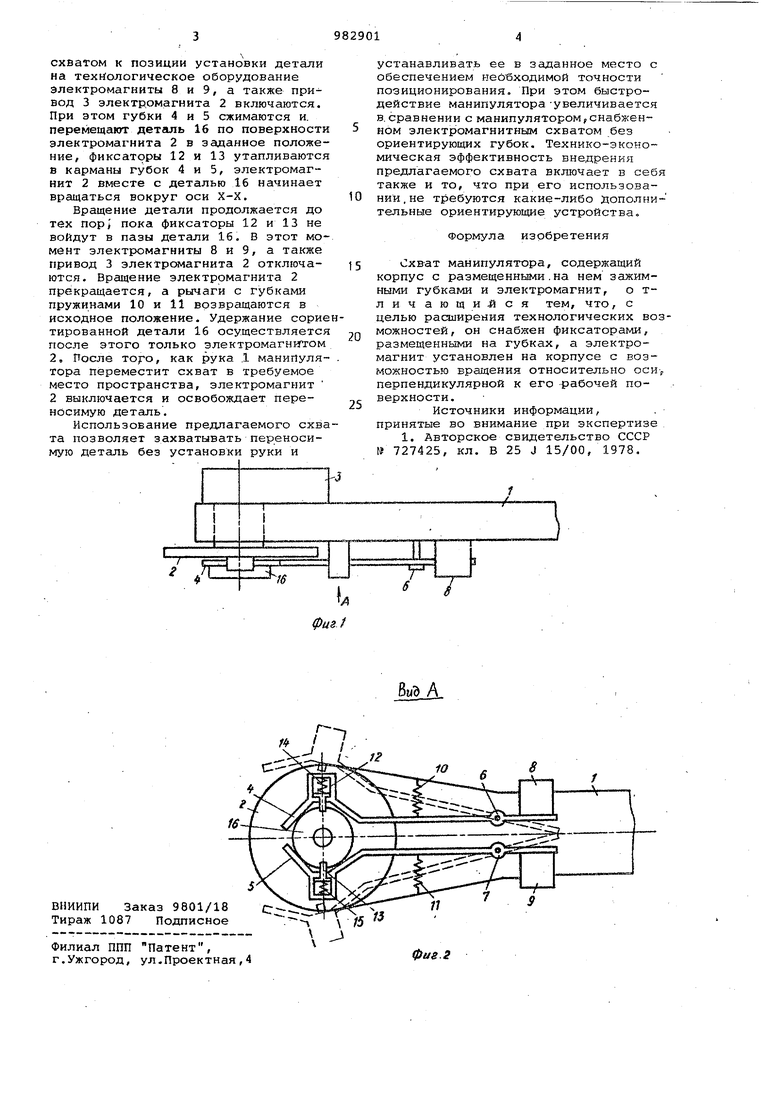
На фиг. 1 изображен схват, общий вид; на фиг. 2 - вид А на фиг. 1.
На руке 1 манипулятора установлен электромагнит 2 и привод 3, обеспочивающий вращение магнита вокруг оси Х-Х. На руке 1 установлены также рычаги 4 и 5 с губками. Они смонтированы на цилиндрических шарнирах 6 и 7. На руке 1 установлен также привод рычагов, обеспечивающий их перемещение. В качестве привода
10 могут быть использованы например, электромагниты 8 и 9 и возвратные пружины 10 и 11. В губках схвата с возможностью поступательного движения установлены фиксаторы 12 и 13,
15 выталкиваемые пружинами 14 и 15. В качестве фиксаторов могут быть использованы, например, микропереключатели, включенные в электрические цепи электромагнитов 8 и 9 привода
20 3 электромагнита 2. В губках 4 и 5 установлена деталь 16.
Предлагаемый схват работает следующим образом.
В исходном положении электромаг25ниты 2,8 и 9 выключены, рычаги с губками расположены так, как показа-, но на фиг. 2 пунктиром. При прохождении схвата нал деталью электромагнит 2 включается и притягивает
30 деталь. Во время перемещения руки со охватом к позиции установки детали на технологическое оборудование электромагниты 8 и 9, а также привод 3 электромагнита 2 включаются. При этом губки 4 и 5 сжимаются и. перемещают деталь 16 по поверхности электромагнита 2 в заданное положение, фиксаторы 12 и 13 утапливаются в карманы губок 4 и 5, электромагнит 2 вместе с деталью 16 начинает вращаться вокруг оси Х-Х. Вращение детали продолжается до тех пор; пока фиксаторы 12 и 13 не войдут в пазы детали 16. В этот момент электромагниты 8 и 9, а также привод 3 электромагнита 2 отключаются. Вращение электромагнита 2 прекращается, а рычаги с губками пружинами 10 и 11 возвращаются в исходное положение. Удержание сорие тированной детали 16 осуществляется после этого только электромагнйтгом 2, После торо, как рука ,1 манипулятора переместит схват в требуемое место пространства, электромагнит 2 выключается и освобождает переносимую деталь. Использование предлагаемого схва та позволяет захватывать переносимую деталь без установки руки и устанавливать ее в заданное место с обеспечением неббходимой точности позиционирования. При этом быстродействие манипулятора -увеличивается в. сравнении с манипулятором,снабженном электромагнитным схватом без ориентирующих губок. Технико-экономическая эффективность внедрения предлагаемого схвата включает в себя также и то, что при его использовании, не требуются какие-либо Дополнительные ориентирующие устройства. Формула изобретения Схв-ат манипулятора, содержащий корпус с размещенными.на нем зажимными губками и электромагнит, о тличающиЛся тем, что, с целью расяиирения технологических возможностей, он снабжен фиксаторами, размещенными на губках, а электромагнит установлен на корпусе с возможностью вращения относительно оси перпендикулярной к его рабочей поверхности. Источники информации, принятые во внимание при экспертизе . 1. Авторское свидетельство СССР г 727425, кл. В 25 J 15/00, 1978,
