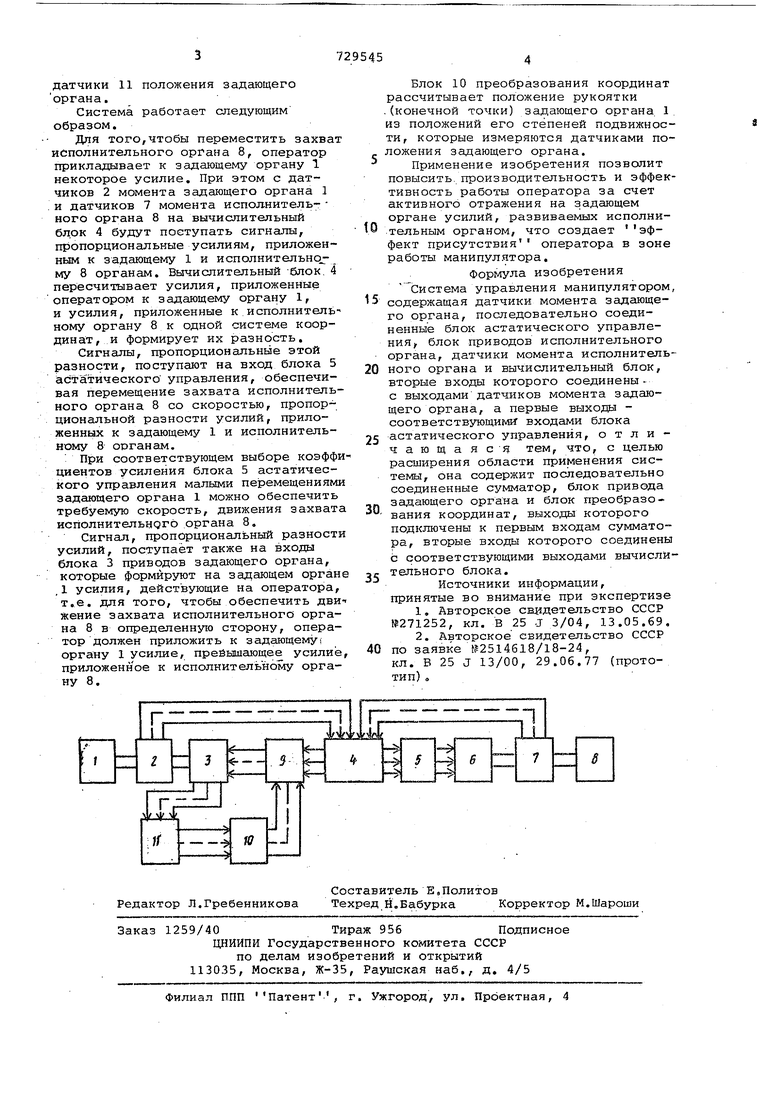
Изобретение относится к робототехнике и может использоваться при создании высокоточных и малогабаритных систем управления манипулятором Известна система управления манипулятором, содержащая датчики усилий задающего органа и последовательно соединенные блок астатического управ ления, блок следящих приводов и датчики усилий, исполнительного органа 1 . Однако такая система не позвсэляет оператору дозировать усилия, развиваемые исполнительным.органом. Наиболее близким к предлагаемому изобретению система управления мани пулятором, содержащая датчики момента задающего органа, последовательно соединенные блок астатического управления, блок приводов исполнительного органа, датчики момента исполнительного органа и вычисли-, тельный блок, вторые входы которого соединены с выходами датчиков момента задающего органа, а первые выходы - с соответствующими входами блока астатического управления 2. Эта система позволяет дозировать усилия, развиваемые исполнительным органом. Однако такая система не обладает свойством активного отраже.ния усилий исполнительного органа, что сужает круг операций, выполняемых манипулятором, и эффективно работает лишь при качественной визуальной обратной связи. Цель изобретения -.расширение области применения системы. Это достигается тем, что система содержит последовательно соединенные сумматор, блок приводов задающего органа и блок преобразования координат, выходы которого подключены к первым входам сумматора, вторые входы которого соединены с соответствующими выходами вычислительного блока. На чертеже приведена функциональная схема системы управления манипулятором. Она содержит задающий орган т, датчики 2 момента задающего органа, блок 3 приводов задающего органа, вычислительный блок 4, блок 5 астатического управления, блок 6 приводов исполнительного органа, датчики 7 момента исполнительного органа, исполнительный орган 8, сумматор 9, ;блок 10 преобразования координат.
датчики 11 положения задающего органа.
Система работает следующим образом.
Для того,чтобы переместить захват сполнительного органа 8, оператор приклсщывает к задающему органу 1 некоторое усилие. При этом с датчиков 2 момента задающего органа 1 и датчиков 7 момента испол-нитель- ного органа 8 на вычислительный блок 4 будут поступать сигналы, пропорциональные усилиям, приложенным к задающему 1 и исполнительно му 8 органам. Вычислительный -блок. 4 пересчитывает усилия, приложенные ператором к задающему органу 1, и усилия, приложенные к исполнитель ному органу 8 к одной системе координат, и формирует их разность,
Сигналы, пропорциональные этой разности, поступают на вход блока 5 астатического управления, обеспечивая перемещение захвата исполнительного органа 8 со скоростью, пропорциональной разности усилий, приложенных к задающему 1 и исполнительному 8 органам.
При соответствующем выборе коэффициентов усиления блока 5 астатического управления малыми перемещениями задающего органа 1 можно обеспечить требуемую скорость, движения захвата исполнительного органа 8.
Сигнал, пропорциональный разности усилий, поступает также на входы блока 3 приводов задающего органа, которые формируют на задающем органе ,1 усилия, действующие на оператора, т.е, для того, чтобы обеспечить дви- жение захвата исполнительного органа 8 в определенную сторону, оператор должен приложить к задающему; органу 1 усилие, прейышающее усилие, приложенное к исполнительному органу 8.
Блок 10 преобразования координат рассчитывает положение рукоятки .(конечной точки) задающего органа, 1 из положений его степеней подвижности, которые измеряются датчиками положения задающего органа.
Применение изобретения позволит повысить производительность и эффективность работы оператора за счет активного отражения на задающем органе усилий, развиваемых исполниэфтельным органом, что создает
фект присутствия оператора в зоне работы манипулятора.
Формула изобретения система управления манипулятором содержащая датчики момента задающего органа, последовательно соединенные блок астатического управления, блок приводов исполнительного органа, датчики момента исполнительного органа и вычислительный блок, вторые входы которого соединены с выходамидатчиков момента задающего органа, а первые выходы соответствующим входами блока астатического управления, о т л и чающаяся тем, что, с целью расширения области применения системы, она содержит последовательно соединенные сумматор, блок привода задающего органа и блок преобразования координат, выходы которого подключены к первым входам сумматора, вторые входы которого соединены с соответствующими выходами вычислительного блока.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР №271252, кл. В 25 J 3/04, 13.05,69,
2.Авторское свидетельство СССР по заявке №2514618/18-24,
кл. В 25 J 13/00, 29,06,77 (прототип) ,
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления манипулятором | 1977 |
|
SU642671A1 |
| Устройство для управления манипулятором | 1981 |
|
SU960723A1 |
| Система управления манипулятором | 1978 |
|
SU723501A1 |
| Система управления манипулятором | 1978 |
|
SU805245A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1101786A1 |
| Устройство для управления манипулятором | 1976 |
|
SU692722A1 |
| Система управления копирующим манипулятором | 1977 |
|
SU614939A1 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Устройство для управления астатическим манипулятором | 1982 |
|
SU1037206A1 |
| Устройство для позиционно-скоростного управления манипулятором | 1981 |
|
SU991366A1 |
