Изобретение относится к робототехнике и может быть использовано при создании дистанционных копирующих манипуляторов. Известно устройство для управления манипулятором, содержащее на задающем и исполнительном органах датчики положения и нагрузки, усилитель и привод Cl. Однако оно не обеспечивает отражения на задаквдем органе нагрузок, действуквдих на исполнительном органе. Наиболее близким техническим решением к изобретению является устройство,содержащее первый привод связанный через первый датчик момента с первым датчиком положения, выход которого соединен с первым входом сумматора, второй привод, с занный через второй датчик момента вторым датчиком положения, подключенным выходом к второму входу сум матора, выход первого датчика момента соединен с первым входом первого нелинейного элемента, подключенного выходом к входам блока астатического управления и первого привода C2J. Известное устройство обладает свойством активного отражения усили и изменения величины усилия исполнительного органа, но оно позвол ет дозировать усилие исполнительного органа в зависимости лишь от знака и величины моментов, действую на задающей и исполнительной сторонах, не учитывая таких важных динамических параметров манипулятора, как скорость исполнительного органа и взаимодействие исполнительного органа с объектом манипули рования, что снижает быстродействие и точность работы всей системы в це лом. Цель изобретения является повыше ние быстродействия и точности устройства. Цель достигается тем, что в устройство, содержащее первый.привод, связанный через первый датчик момен та с первым датчиком положения, выхо которого соединен с первым входом сумматора, второй привод, связанный через второй датчик момента с вторы датчиком положения, подключенным вы ходом к второму входу сумматора, вы ход первого датчика момента соедине с первым входом первого нелинейного элемента, подключенного выходом к вхрдам блока астатического управлен и первого привода, введены установленный на схвате исполнительного ор гана тактильный датчик, логический блок и последовательно соединенные второй нелинейный элемент и ключ, второй вход которого подключен к выходу второго датчика момента, а выход - к второму входу первого нелинейного элемента, соединенного выходом с первым входом логического блока, второй вход которого подключен к выходу второго нелинейного элемента, третий вход - к выходу сумматора, четвертый вход - к выходу тактильного датчика, а выход - к входу второго привода, выход блока астатического управления соединен с входом второго нелинейного элемента. На чертеже представлена функциональная схема устройства. Устройство содержит задакнций орган 1, первый датчик 2 момента, первый привод 3, лервый датчик 4 положения, сумматор 5, первый нелинейный элемент 6, блок 7 астатического управления, второй нелинейный элемент 8, логический блок 9, второй привод 10, второй датчик 11 момента, исполнительный орган 12, тактильный датчик 13, второй датчик 14 положения и ключ 15. Устройство работает следующим образом. Нелинейный элемент б реализует зависимость (W 4iV4. ЛЛ « Ar lVIVI. где К - коэффициент пропорциональности;. - сигналы функциональных блоков ; i - индекс блока-датчика; j - индекс блока-приемника. Ключ 15 работает в режиме JV- 8, X 4is Нелинейный элемент 8 реализует зависимость. есди|и,,, v-vis,. 7. где зона малых скоростей. Режи.м работы, логического блока 9 определяется выражением Ugg , если Ug,0 ; , VO з (1 8,5 B. V° где и,- : - сигналы соответствующих функциональных блоков; i - индекс блока-датчика; j - индекс блока-приемника. Сигнал Ujj с датчика 2 момента задающего органа 1 поступает на нелинейный элемент 6 и далее через
блок 7 астатического управления на нелинейный элемент 8. При значении сигнала U,;,; , пропорционального скорости задающего органа 1, меньшем наперед заданного значения и , определяющего зону малых скоростей, сигнал на выходе нелинейного элемента 8 отсутствует, и блок 9 подключает вход привода 10 исполнительного органа к выходу нелинейного элемента б, при наличии сигнала на управляющем входе блока 9 с выхода датчика 13 или сумматор 5 при отсутствии на управляющем входе блока 9 сигнала с выхода датчика 13. В то же время выход датчика 11 момента исполнительного органа подключается к входу нелинейного элемента 6, так как Сигнгш на выходе нелинейного элемента 8 имеет нулевое значение, и ключ 15 не срабатывает. При этом привод 10 исполнительного органа 12 оказывается замкнутым либо по усилию, либо по положению.
Одновременно на привод 3 задающего органа 1 поступает сигнал с нелинейного элемента 6, значение которого определяется выражением (1) в зависимости от знака и величины сигналов Ujjfe и U,s-g с датчика 2 момента задающего органа 1 и датчика 11 момента исполнительного органа 12, при этом оператор сацущает лишь противодействующее усилие нагрузки.
Если же значение сигнала с выхода блока 7 астатического управления превысит по абсолютному значению величину и , то согласно выражению (З) на выходе нелинейного элемента 8 появится сигнал, равный по величине сигналу с блока 7, который поступает на вход ключа 15, вызывая его срабатывание и разрывая тем сакым цепь обратной связи исполнительной систем по моменту.
Одновременно сигнгш с нелинейного элемента 8 поступает на вход блока 9, который подключает вход
привода 10 исполнительного органа 12 через нелинейный элемент 8 к выходу блока 7 астатического управления, реализуя алгоритм управления приводом 10 исполнительного органа 12. по вектору скорости.
При этом на привод 3 задающего органа 1 поступает лишь сигнал с датчика 2 момента, пропорциональный
0 моменту, развиваемому оператором на задающем органе 1, и оператор не опусяцущает усилий на задающем органе.
Таким образом, при глобальных перемещениях исполнительного орга5 на 12 или при работе в свободной зоне оператор управляет скоростью перемещения исполнительного органа 12, не ощущая усилий, действующих на исполнительный орган 12 со сторо0ны нагрузки. При подходе к зоне работы непосредственно с объектом манипулирования и снижения скорости исполнительного органа 12 ниже наперед Зсщанного значения U проис- .
5 ходит автоматическое переключение устройства с алгоритма управления скоростью исполнительного органа 12 на алгоритм управления положением исполнительного органа 12, и оператор ощущает на задающем органе 1
0 усилия, действующие на исполнитель- ный орган 12 со стороны нагрузки. При выходе на гран.ицу свободной зоны манипулирования, т.е. при жестком контакте исполнительного органа 12
5 с объектом манипулирования жестким упором, либо каким другим препятствием осуществляется автоматическое переключение устройства на алгоритм управления приводом 10 испол0нительного органа 12 по вектору силы, и оператор ощущает на знающем органе 1 противодействующие усилия нагрузки,, действующие на исполнительный орган 12.
Применение изобретения позволит
5 повысить.производительность и эффективность работы манипулятора путем повышения быстродействия и точности устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления схватом манипулятора | 1980 |
|
SU949628A1 |
| Копирующий манипулятор | 1983 |
|
SU1093542A2 |
| Система управления манипулятором | 1978 |
|
SU729545A1 |
| Копирующий манипулятор | 1980 |
|
SU946918A1 |
| Устройство для управления манипулятором | 1981 |
|
SU960723A1 |
| Обратимая следящая система | 1983 |
|
SU1176301A1 |
| Устройство для управления дистанционным манипулятором | 1986 |
|
SU1355481A1 |
| Манипулятор | 1975 |
|
SU743861A1 |
| Система управления манипулятором | 1977 |
|
SU642671A1 |
| Система управления манипулятором | 1978 |
|
SU723501A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ, содержащее первый привод, связанный через первый датчик момента с первым датчиком положения , выход которого соединен с первым входом сумматора, йторой привод, связанный через второй датчик момента с вторым датчиком положения, подключенным выходом к второму входу сумматора, выход первого датчика момента соединен с первым входом первого нелинейного элемента, подключенного выходом к входам блока астатического управления и первого привода, отличающееся тем, что, с целью повышения быстродействия и точности устройства, оно содержит установленный на схвате исполнительного органа тактильный датчик, логический блок и последовательно соединенные второй нелинейный элемент и ключ, второй вход которого подключен к выходу второго датчика момента, а выход - к второму входу первого нелинейного элемента, соединенного выходом с первым входом логического блока, второй вход которо- g го подключен к выходу второго нелиКЛ нейного элемента, третий вход - к выходу сумматора, четвертый вход к выходу тактильного датчика, а выход - к входу второго привода, выход блока астатического управления соединен с входом второго нелинейного элемента. эо Ot)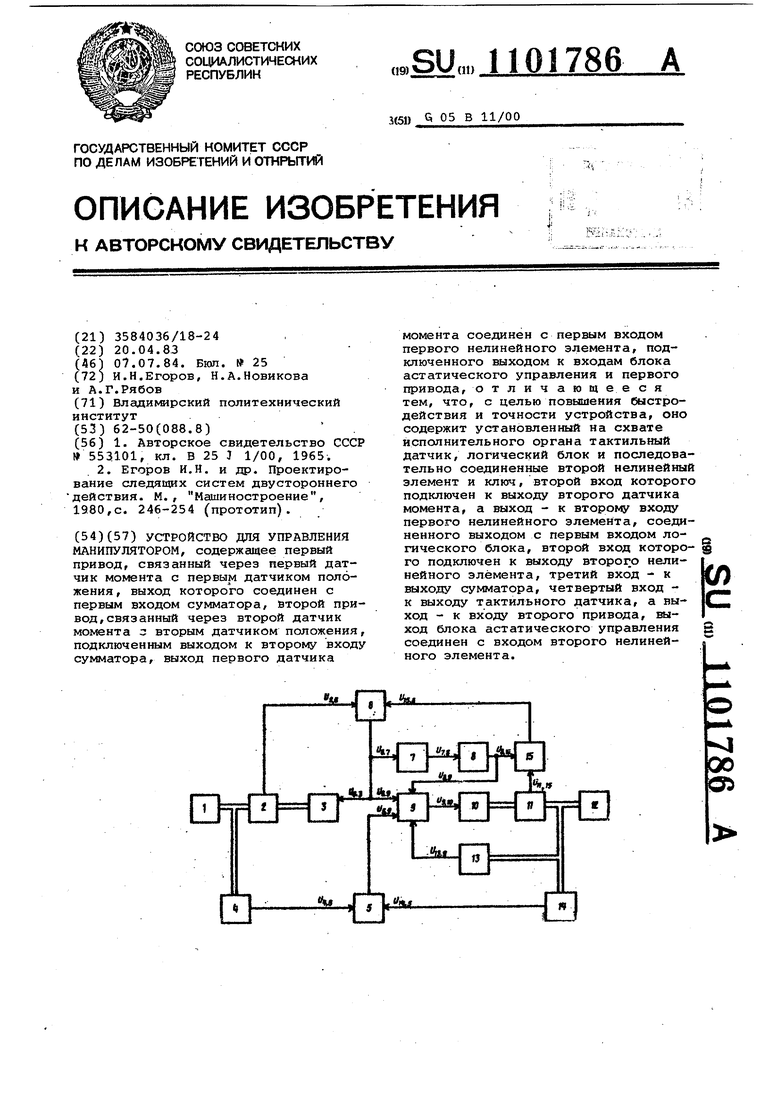
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления манипулятром | 1975 |
|
SU553101A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Егоров И,Н | |||
| и др | |||
| Проектирование следящих систем двустороннего действия | |||
| М., Машиностроение, 1980,0 | |||
| Котел | 1921 |
|
SU246A1 |
