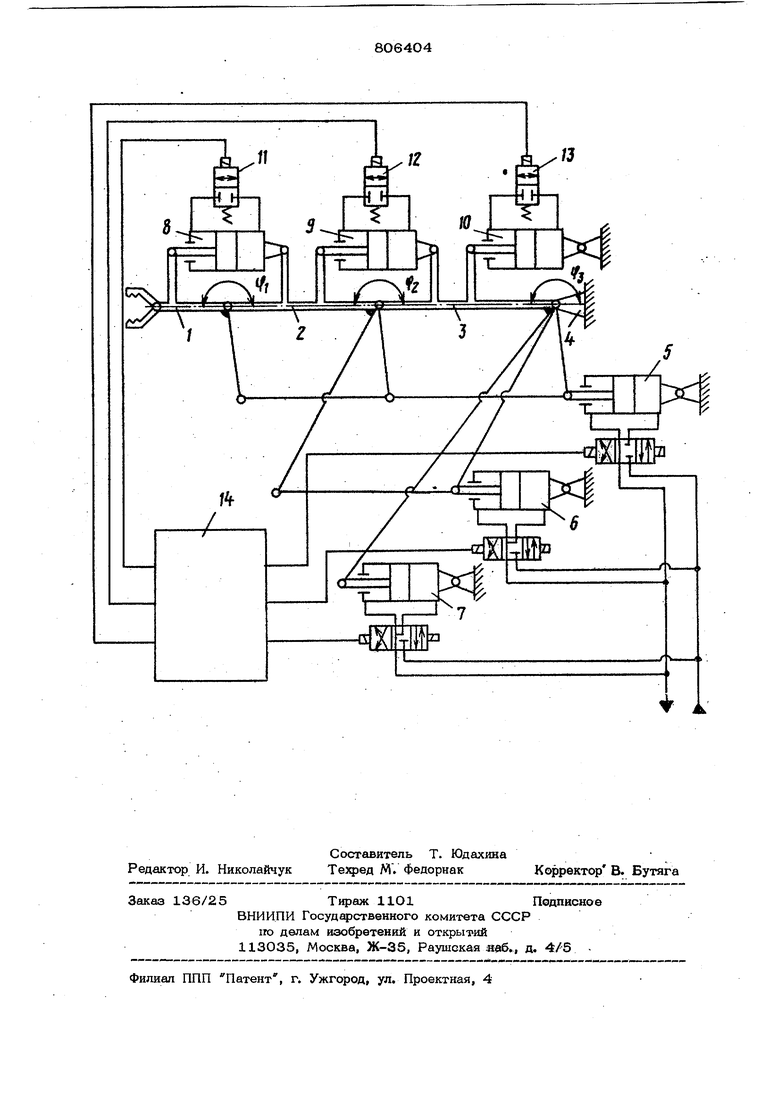
Изобретение относигся к машиностро ению и может быть использовано в автоматических манипуляторах с прохтэаммным управлением. Известен способ управления манипулятором, при котором с целью уменьшешш погрешностей, вызываемых люфтами в кинематических цепях, применяе ся управление движением манипулятора путем изменения сил сипротивления, создаваемых гидротормозными устройствами, расположенными В суставах, манипулятора, при постоянных двигкуишх силах со стороны силовых двигателей, расположенных на основании l. Однако кинематическая развязка звеньев обеспечивается специальным компенсирующим дифференциальным механизмом, что усложняет Механическую часть манипулятора Цель изобретения - обеспечение кинематической развязки звеньев манипулятора. Указанная цель .достигае гся тем, что согласно известному способу управления манипулятором, включающему подачу управляющего сигнала на золотник гидротормозного устройства управляемого звена при включенном двигателе и эежрытие золотника после отработки движения, приводные двигатели кинематически связанных звеньев ОТКЛЮЧАЮТ от источника питания одновременно с подачей управляющего сигнала на золотник, обеспечивая свободу их перемещения совместно с кинематическими цепями, и снова включают после обработки движения. Кроме того, приоднов1эеменном управлении несколькими звеньями отключают от источников питания приводные двигатели только тех кинематически связанных звеньев, относшвльное натя1жение которых неизменно. На чертеже представлен вариант кинематической схемы автоматического манипулятора с программным управлением с тремя степенями свободы, реали38аующей Щ)едлагаемый способ управлешш манипулятором. Автоматический ман тулятор с програ мным управлением, реализующий предлаг емый способ управления, содержит четыр звене 1-4, приводные двигатели 5-7, расположенные на основании, гидротормозные устройства 8-10 с золотниками 11-13, управляемыми сигналами от гфограммного устройства 14. Гидротормозные устройства выполнены в виде двух сообщающихся через золотник . Управление манипулятором осуществл ется следующим образом. В положении статического равновесия всех звеньев приводные двигатели 5-7 подключены к источнику питания, - золотники 11-13 закрыты. Двихсущие силы, создаваемые двигателями, уравновешиваются силами сопротивления, , создаваемыми гидротормозными устройствами . Для изменения, например, уЬла ( прогоаммного устройства 14 к золотнику 13 поступает сигнал, золотник отрывается, чтоприводит к уменьщенйю гидравлического сопротивления перепускного канала. Это, в свою очередь, вызывает умен шение силы сопротивления, создаваемой гвдротормозным устройством 10. Одновреме1шо с подачей сигнала на золотник 13 по сигналу от программного устройства приводные двигатели 5 и 6 отключают от источников питания. Так как золотники -11 и 12 закрыты, то изменение угла ij) осуществляется при постоянных углах ф и О) . Предлагаемый способ применяется и для обеспечения одновременного изменения нескольких углов. При этом отключают от источников питания или переводят в режим автоматической компенсации сопротивления в кинематических цепях и привода только приводные двигатели тех кинематически связанных звеньев, относительное натяжение которы не изменяется. Для одновременного изме 4 нения, например, углов Ср и tp, от про-, граммного устройства 14 подают сигналы к золотникам 11 и 13 и одновременно отключают от (источника питания приводной двигатель 6. В этом случае одновременное изменение углов ф, и ( осуществляется при постоянном угле ф,. Предлагаемый способ управления манипулятором устраняет необходимость использования громоздких компенсирующих механизмов, что позволяет уменьшить габариты,. вес и материалоемкость автоматического манипулятора. ормулаизобретения .1. Способ управления манипулятором, предусматривающий подачу управляющего сигнала на золотник гидротормозного устройства управляемого звена при включенном приводном двигателе и закрытие золотника )ПОсле отработки движения, отличающийся тем, что, с целью обеспечения кинематической развязки звеньев манипулятора, приводные двигатели звеньев , кинематически связанных с управляемым звеном, отклю.чают от источника питания одновреме1лно с подачей управляющего сигнала на золотник и включают после отработки движения. 2. Способ по п. 1, о т л и ч а ющ и и с я тем, что при одновременном управлении несколькими звеньями отключают от источника питания приводные двигатели только тех кинематически связанных звеньев, относительное натяжение которых неизменно. Источники информации, принятые во внимание при экспертизе 1. Кобринский А. Е. к др. Принципы построения двигательной системы автоматических манипуляторов с програм :- мным управлением (промышленных роботов). - Станки и инструмент, 1976, № 4, с. 6.
I
/j
/г
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1975 |
|
SU515634A1 |
| Автоматический манипулятор с программным управлением | 1985 |
|
SU1390014A1 |
| АГРЕГАТ ФРОНТАЛЬНЫЙ ДОЛИНСКОГО АФД, ИСПОЛНИТЕЛЬНЫЙ ОРГАН (ВАРИАНТЫ), ЦЕПЬ КОЛЬЦЕВАЯ, СТАВ АГРЕГАТА, МЕХАНИЗМ РЕГУЛИРОВАНИЯ ПО ГИПСОМЕТРИИ, СЕКЦИИ КРЕПИ, ПЕРЕКРЫТИЕ, КРЕПЬ ВАНДРУТНАЯ, ТРАНСПОРТНОЕ ОБОРУДОВАНИЕ, ПЕРЕГРУЖАТЕЛЬ (ВАРИАНТЫ), ГИДРОДВИГАТЕЛЬ ДЛЯ ЭМУЛЬСИИ, СРЕДСТВО УПРАВЛЕНИЯ, СРЕДСТВО КОНТРОЛЯ ГРАНИЦЫ "УГОЛЬ-ПОРОДА", СПОСОБЫ МОНТАЖА И САМОМОНТАЖА | 1996 |
|
RU2114996C1 |
| Автоматический манипулятор с программным управлением | 1980 |
|
SU906684A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКООРДИНАТНЫМ ПЯТИЗВЕННЫМ МАНИПУЛЯТОРОМ | 2004 |
|
RU2288091C2 |
| Устройство для автоматической сварки иНАплАВКи СлОжНыХ пОВЕРХНОСТЕй | 1979 |
|
SU804278A1 |
| Способ управления манипулятором промышленного робота | 1991 |
|
SU1815209A1 |
| Устройство управления резонансным позиционным механизмом | 1987 |
|
SU1451646A1 |
| ГИДРАВЛИЧЕСКИЙ ВИБРОВОЗБУДИТЕЛЬ ДЛЯ ПОЛУЧЕНИЯ СЕЙСМИЧЕСКОГО СВИП-СИГНАЛА | 1991 |
|
RU2006882C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
с
i i
