t
Изобретение относится к контрольно-измерительно технике и может использоваться для контроля замкнутых тонкостенных оболочек, например, заполненных продуктами пакетов типа тетра-пак и консервных банок.
известен автомат контроля герметичности изделий, например консервных банок, содержащий станину с размещенными на ней приводом, транспортером с элементами установки изделий герметичным колпаком с герметизируют, щими устройствами для ввода и вывода из него контролируемых изделий, бракующим устройством, толкателем, йзаямодействую1дам с ним, и системой подачи .сжатого воздуха в колпак 11.
Однако известный автома не содержит системы вакуумирования и поэтому не обеспечивает возможности проведения контроля герметичности тонкостенных замкнутых оболочек, например . пакетов типа тетра-пак- способом вакуумирования с измерением деформации оболочки от воздействия на нее перепада давлений.
Наиболее близким по технической сущности к изобретению является автомат контроля герметичности изделий, содержащий станину, поворотный
стол с основаниями, имеющими упругий установочный и уплотнительный элементы, герметизирующими колпаками и устройством подъема колпаков,
привод, бракующее устройство, разме.- щенные на станине систему вакуумирования колпаков с золотниковым приспособлением, систему подачи сжатого воздуха 1 в колпаки с отсечным краном ,
транспортное устройство, манипулятор подачи изделий на установочный элемент, связанный с бракующим устройством съемник и толкатель 2. Недостатком известного автомата
является то/ что он не обеспечивает возможности контроля замкнутых тонкостенных оболочек и не позволяет проводить контроль герметичности под избьггочньоА .давлением.
Цель изобретения - обеспечение возможности контроля замкнутых тонкостенных оболочек, а также расширение технологических возможностей контроля.
Поставленная цель достигается
тем, что бракующее устройство разме&$ено внутри колпака и выполнено в вице подпружиненных фиксаторов изделия, щутга и замыкаемого им нормально
разомкнутого контакта, связанного
С устройством подъема колпаков а также тем, что устройство подъема колпаков содержит механизм программного подъема колпаков и 17одъемник, соединенный штангой с колпаком и подключенный к цепи с нормально разомкнутым контактом бракующего устройства,, а .также тем, что автомат снабжен соединенными с колпаками дренажными кранами и механизмом управления кранами, тголкатель выполнен в виде упругого элемента, упирающегося в опу- щенный колпак, и тем, что механизм программного подъема выполнен в виде неподвижного копира, установленного на станине, и жестко соединенной с колпаком и подвижно с консолью поворотного стола вертикальной направляющей с пружиной и ходовым роликом, закрепленньил в верхней части направляющей и взаимодействующим с копиром.
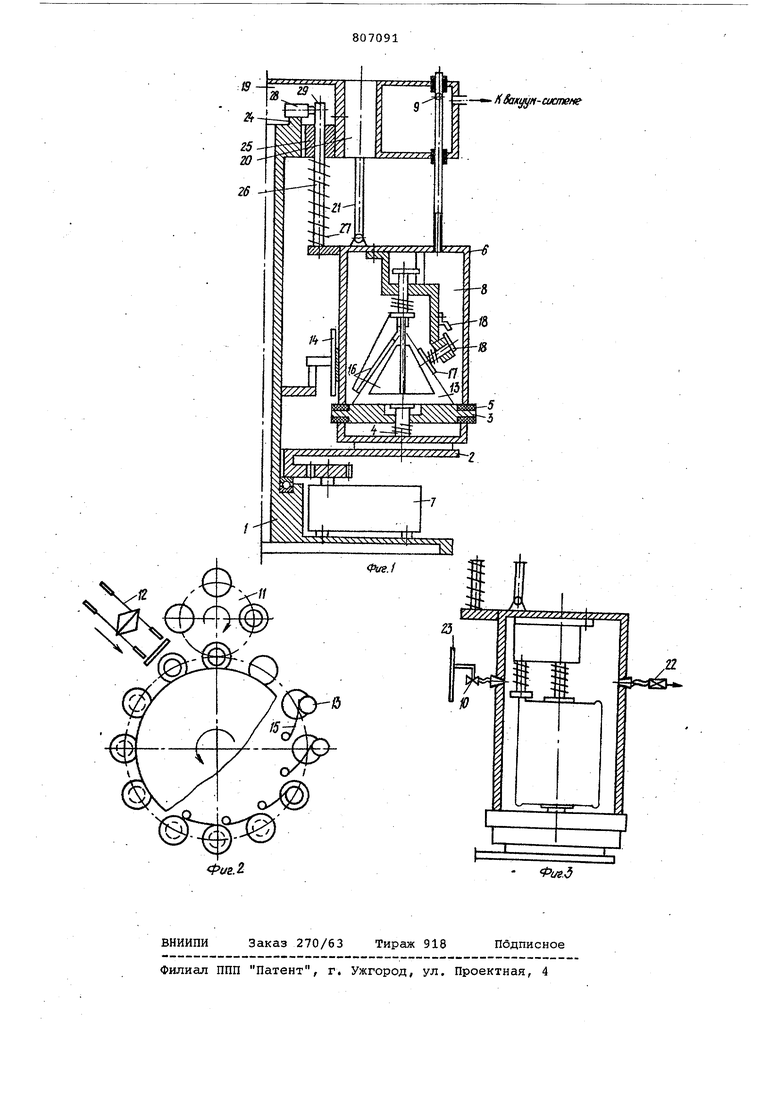
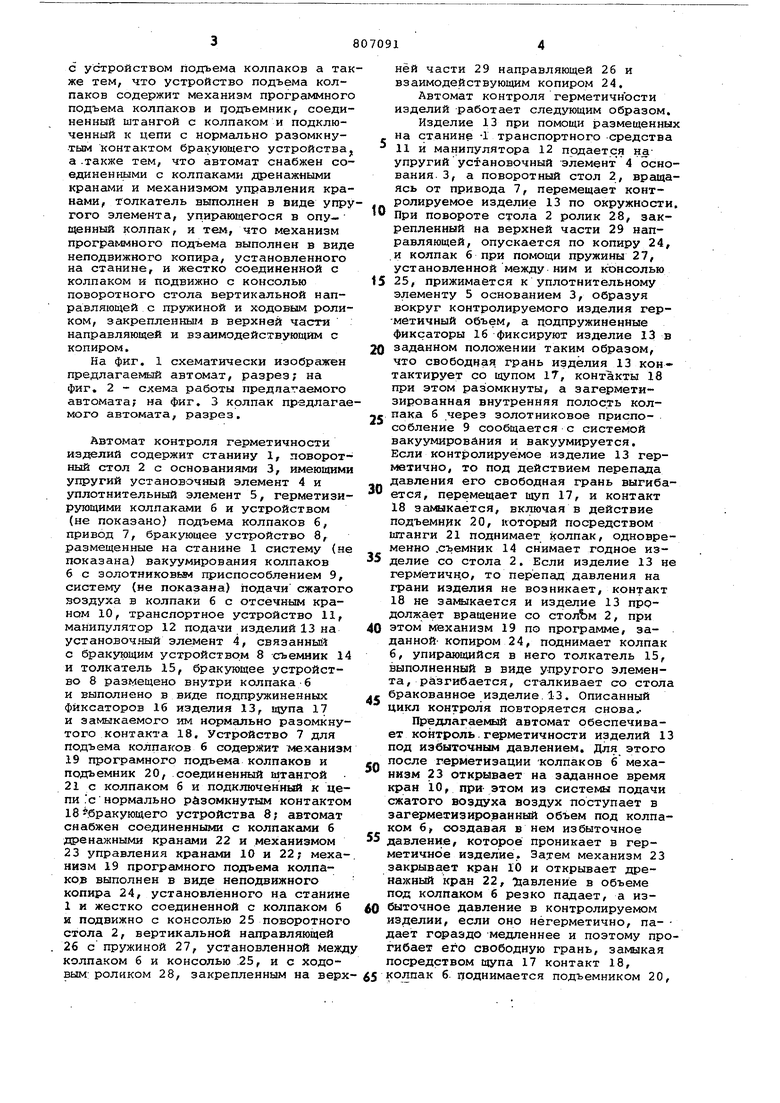
На фкг. 1 схематически изображен предлагаегжзй автомат, разрез; на фиг. 2 - схема работы предлагаемого автомата; на фиг, 3 колпак предлагаемого автомата, разрез.
Автомат контроля герметичности изделий содержит станину 1, поворотный стол 2 с основаниями 3, имеющими упругий установочный элемент 4 и уплотнительный элемент 5, герметизирующими колпаками б и устройством (не показано) подъема колпаков б, привод 7, бракующее устройство 8, размещенные на станине 1 систему (не показана) вакуумирования колпаков 6 с золотниковья приспособлением 9, систему (не показана) подачи сжатого воздуха в колпаки б с отсечным краном 10, транспортное устройство 11, манипулятор 12 подачи изделий 13 на установочный элемент 4, связаннШ с бракующим устройством 8 -съемник 14 и толкатель 15, бракующее устройство 8 размещено внутри колпака-6 и выполнено в виде подпружиненных фиксаторов 16 изделия 13, щупа 17 и замыкаемого им нормально разомкнутого контакта 18. Устройство 7 для подъема колпаков 6 содержит механизм 19 програмного подъема колпаков и подъемник 20, соединенный взтангой 21 с колпаком 6 и подключенный к цепи .с нормально рйзомкнутым контактом 18 .бракующего устройства 8; автомат снабжен соединенными с колпаками б дренажными кранами 22 и механизмом 23 управления кранами 10 и 22; механизм 19 програмного подъема колпаков выполнен в виде неподвижного копира 24, установленного на станине 1 и жестко соединенной с колпаком б и подвижно с консолью 25 поворотного стола 2, вертикальной направляющей 26 с пружиной 27, установленной межд колпаком б и консолью .25, и с ходовым; роликом 28, закрепленным на верхней части 29 направляющей 26 и взаимодействующим копиром 24,
Автомат контроля герметичности изделий работает следующим образом.
Изделие 13 при помощи размещенны на станине -1 транспортного -средства 11 и манипулятора 12 подаетс я наупругий установочный -элемент 4 основания. 3, а поворотный стол 2, вращаясь от привода 7, перемещает контролируемое изделие 13 по окружности При повороте стола 2 ролик 28, закрепленный на верхней части 29 направляющей, опускается по копиру 24, и колпак б при помощи пружины 27, установленной между ним и консолью 25, прижимается к уплотнительному элементу 5 основанием 3, образуя вокруг контролируемого изделия гер-метичный объем, а подпружиненные фиксаторы 16 фиксируют изделие 13 в заданном положении таким образом, что свободная, грань изделия 13 контактирует со щупом 17, контакты 18 при этом разомкнуты, а загерметизированная внутренняя полос.ть колпака б через золотниковое приспособление 9 сообщается с системой вакуумирования и вакуумируется. Если контролируемое изделие 13 герметично, то под действием перепада давления его свободная грань выгибается, перемещает щуп 17, и контакт 18 замыкается, включая в действие подъемник 20, который посредством штанги 21 поднимает колпак, одновременно .съемник 14 снимает годное изделие со стола 2. Бели изделие 13 н герметично, то перепад давления на грани изделия не возникает, контакт 18 не зa fiлкaeтcя и изделие 13 продолжает вращение со столЬм 2, при этом механизм 19 по программе, заданной копиром 24, поднимает колпак б, упирающийся в него толкатель 15, выполненный в виде упругого элемента, разгибается, сталкивает со стола бракованное изделие.13. Описанный цикл контроля повторяется снова..
Предлагаемый автомат обеспечивает контроль . герметичности изделий 1 под избыточным давлением. Для этого после герметизации Колпаков б механизм 23 открывает на заданное время кран 10, при- этом из системы подачи сжатого воздуха воздух поступает в загерметизированный объем под колпаком б, создавая в нем избыточное давлени.е, которое проникает в герметичное изделие.. Затем механизм 23 закрывает кран 10 и открывает дренажный кран 22, Травление в объеме под колпаком 6 резко падает, а избыточное давление в контролируемом изделии, если оно нёгерметично, падает гораздо медленнее и поэтому прогибает его свободную грань, замыкая посредством щупа 17 контакт 18, колпак б. поднимается подъемником 20
а бракованное изделие 13 снимается со стола съемниками 14. В случае, когда изделие 13 под колпаком 6 годное, колпак б поднимается механизмом 19, а изделие 13 снимается со стола 2 толкателем 15,
Использование данного изобретения позволяет проводить автоматизированный контроля герметичности замкнутых тонкостенных оболочек, например консервных банок и заполненных пакетов типа тетра-пак как в условиях вакуума, так и под повышенным давлением.
Формула изобретения
1. Автомат контроля герметичности изделий, содержащий станину, поворотный стол с схзнованиями, имеющими упругий устаноЪочный и snjnoTHKтельный элементы, герметизирующими колпаками и устройством подъема колпаков, привод, бракующее устройство, размещенные на станине систему вакуумирования колпаков с золотниковым приспособлением, систему по|дачи сжатого воздуха в колпаки с отсеч иал краном, транспортное устройство, манипулято подачи изделий на установочный элемент, связанный с бракующим устройством съемник и толкатель, отличающийся тем, что, с целью обеспечения возможности контроля замкнутых тонкостенных оболочек, бракующее устройство размещено внутри колпака и выполнено в виде подпружиненных фиксаторов издеЛИЯ, щупа и замыкаемого им -нормально разомкнутого контакта,связанного с устройством подъема колпаков.
2.Автомат nori.l, отличающийся тем, что, устройство подъема колпаков содерж-ит механизм программного подъема колпаков и подъемник, соединенный штангой с колпаком и подключенный к цепи с нормально разомкнутым контактом бракующею устройства .
0
3.Автомат ПОП.1, отличающийся тем, что, с целью paciii№ рения технологических возможностей контроля, он снабжен соединенными с колпаками дренажными кранами и меха-:
S низмом управления кранс1ми.
4.Автомат по п.1, о т л и ч а ю щ и и с я тем, что толкатель выполнен в виде упругого элемента, упирающегося в опущенный колпак,
5.Автомат по п.2, отлича0ю щ и и с я. тем, что мех-анизм програмного подъема выполнен в виде неподвижного копира, установленного на станине, и жестко соединенной с колпаком и подвижно с консолью пово5ротного стола вертикальной направляющей с пружинной и ходовым роликом, закрепленным в верхней части направляющей и взаимодействующим с копиром.
0
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 472270, кл. G 01 М 3/00, 1971.
2.Авторское свидетельство СССР
5 по заявке № 2514025/28,
кл, G 01 М 3/02, 1977 (прототип).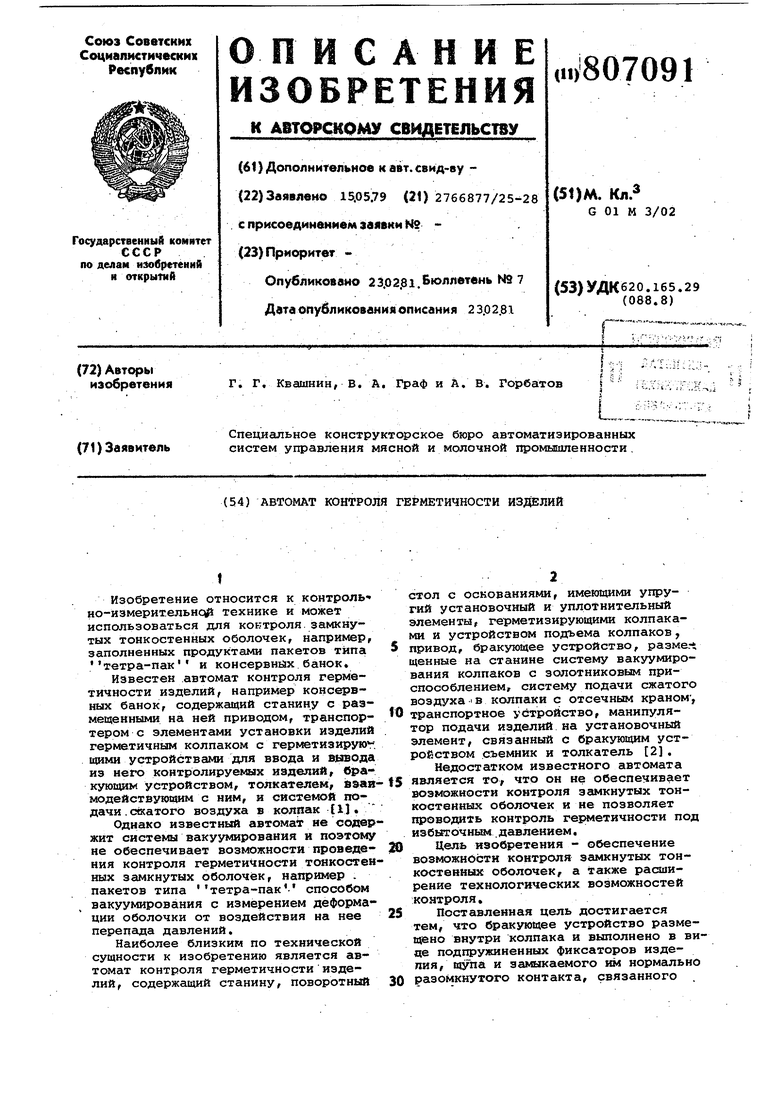
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для контроля герметичности полых изделий | 1980 |
|
SU868385A1 |
| Автомат для испытания изделий на герметичность | 1983 |
|
SU1132159A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ РАЗМЕРОВ БАЛЛОНОВ ЭЛЕКТРОННОЛУЧЕВЫХ ТРУБОК | 1972 |
|
SU332520A1 |
| Автомат для изготовления проволочных решеток | 1985 |
|
SU1291330A1 |
| Многопозиционный сборочный автомат | 1989 |
|
SU1632734A1 |
| УСТРОЙСТВО для УКЛАДКИ в КОРОБКИ ШТУЧНЫХ ПРЕДМЕТОВ | 1969 |
|
SU257331A1 |
| ФРЕЗЕРНЫЙ СТАНОК ДЛЯ ОБРАБОТКИ ДОЛБЯКОВ | 2016 |
|
RU2621199C1 |
| Автомат для сборки тарелок и сухарей с клапанами ДВС | 1990 |
|
SU1761432A1 |
| Стенд для испытания изделий на герметичность | 1990 |
|
SU1756787A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ РАЗМЕРОВ БАЛЛОНОВ ЭЛЕКТРОННОЛУЧЕВЫХ ТРУБОК | 1971 |
|
SU296173A1 |