(54) УСТРОЙСТВО ДЛЯ ПОВОРОТА ВЕКТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вычисления тригонометрических функций | 1979 |
|
SU877527A1 |
| Многоканальное операционное устройство | 1982 |
|
SU1124292A1 |
| Устройство для вычисления логарифма | 1987 |
|
SU1432513A1 |
| Вычислительное устройство | 1986 |
|
SU1361546A1 |
| Вычислительное устройство | 1981 |
|
SU1136147A1 |
| Устройство для вычисления элементарных функций | 1980 |
|
SU940155A1 |
| Устройство для вычисления элементарных функций | 1980 |
|
SU1130861A1 |
| Устройство для извлечения квадратного корня | 1988 |
|
SU1575177A1 |
| Цифровой функциональный преобразователь | 1980 |
|
SU955082A1 |
| Устройство для вычисления квадратного корня | 1981 |
|
SU1008736A1 |
1
Изобретение относится к вычислительной технике и используется при построении цифровых вычислительных машин (ЦВМ) с аппаратурной реализаци ей элементарных функций.
По основному авт. св. № 504197 известно устройство для поворота вектора, .содержащее блок формирования координат вектора, два элемента И, две линии задержки, два суьвлатора и два регистра сдвига, входы каждого элемей а И соединены с соответствую15ими выходами блока формирования координат вектора и двумя входами устройства, выход через линию задержки соединен с первым входом соответству ющего сумматора, выход которого подключен к выходу устройства и через соответствующий регистр сдвига с единенс вторым входом сумматора l .
Это устройство позволяет вычислять значения функции f Aslncf и f Acos Cj) , где А,ф - аргументы, f , fQ - значения функций.
Однако структура известного устройства не приспособлена для вычислв ния значения функции арксинуса з °° -frcsin Z/R, где Z, R - аргументы, f - значение функции.
Цель изобретения - расширение функциональных возможностей устройства для поворота вектора за счет вычисления значения арксинуса.
Поставленная цель достигается тем, что в устройство для поворота вектора введен третий элемент И, первый вход которого соединен с выходом первого сумматора, второй вход - с третьим
0 входом устройства, а выход - с управляющим входом блока формирования координат вектора.
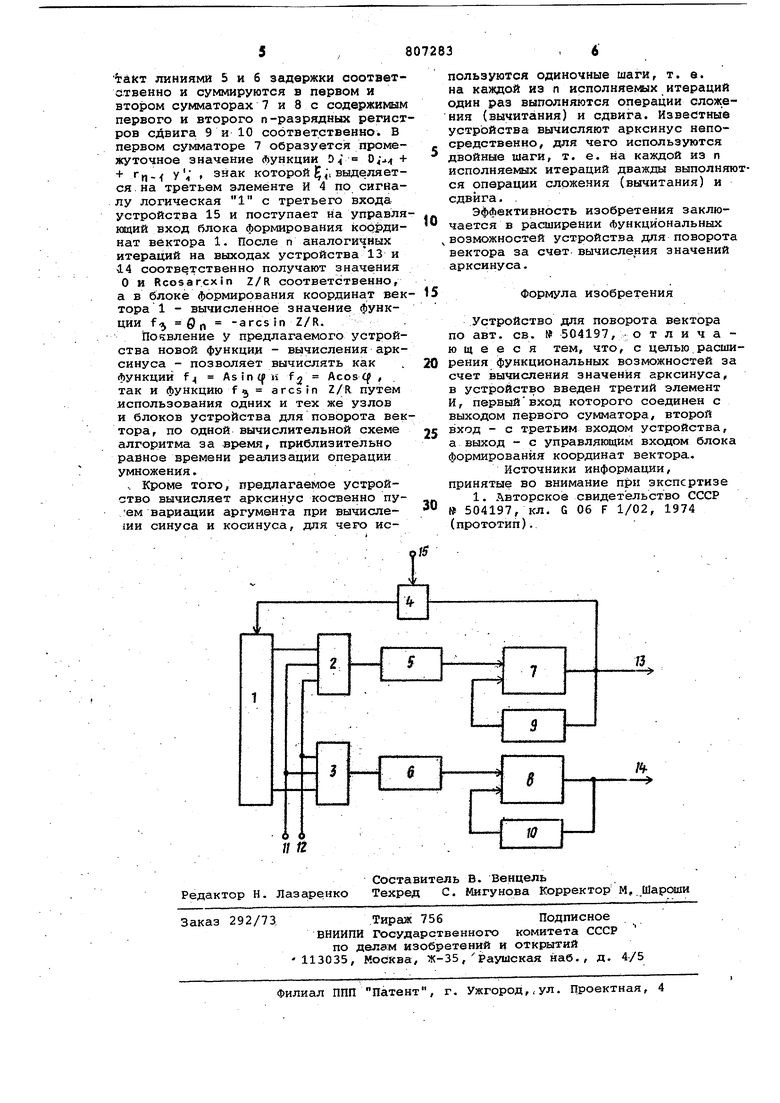
На чертежепоказана блок-схема .устройства для поворота вектора.
5
Устройство содержит блок формирования координат вектора 1, первый, второй и третий элементы И 2-4, первую и вторую линию 5 и 6 задержки, первый и второй сумматоры 7 и 8,
0 первый и второй регистры 9 и 10 сдвига. Первые входы первого и второго элементов И 2 и 3 соединены с соответствующими выходами блока формирования координат вектора 1, Вторые входы первого и второго элементов И 2 и 3 соединены с первым входом устройства 11. Третьи входы первого и второго элемента И 2 и 3 соединены со вторым входом устройства 12. Выходы первого
0 и второго элементов И 2 и 3 через линиш 5 и 6 задержки соединены с .пер-/ вым входом соответствующего сумматора 7 и 8 , выход которого подключен к выходу устройства 13 и 14 и через со ответствующий регистр 9 и 10 сдвига соединен со вторым входом сумматора 7 и 8. Первый вход третьего элемента И 4 соединен с выходом первого сумма -тора 7, второй вход - с третьим входом устройства 15, а выход - с управ ляющим входом блока формирования координат вектора 1. Устройство для поворота вектора может работать в режимах вычисления синуса и косинуса и вычисления арксинуса. При работе устройства в режиме вычисления синуса и косинуса на третий вход устройства 15 на все время вычисления подается сигнал логический О, в результате третий элемент И 4 заблокирован, т. е. третий элемент И 4 не оказывает влияния на работу устройства. Устройство вычисляет функции fl Asintp иf2 ( , где А, ср - аргументы, f, fy - значения Функций путем реализации алгоритма б.4. е.-,х,, Y,,, Y,.x,.2- ,-,Лг2-% где i О, 1,...,п-1, где п -разря ность устройства, 0 arctq 2 - угол, на который поворачивается век тор на -ой итерации, : 6 -1 f +1 функция, показывающая направление вращения вектора на i-ой итерации, 1 /1 V угол и координаты вектора на i-ой итерации, с начальными условиями 90 Ц) , Уд О, XQ VK где - коэффициент удлинения вектора с выбором направления вращения вектора по закону sign При этом используется свойство алгоритма (1), по которому после 1-о итерации образуется i старших точных разрядов координат вектора, т. е. i старших точных разрядов sin Cf и cos(| Если эти точные разряды на i-ой итерации умножить на (п-1)-ый разряд множителя А, то в результате получаются частичные произведения,- пре ставленные в п-разрядной сетке. Суммирование со сдвигом полученных частичных произведений дает в конце последней итерации значения функций f AsinCp и f Acos (р . Устройство работает следующим образом.. В соответствии с алгоритмом (1) на i-ой итерации блок формирования оординат вектора 1 выдает на перые входы элементов И 2 и 3 соответственно младшими разрядами вперед промежуточные значения координат вектора у ц и х|. На первом и втором элеентах И 2 и 3 соответственно по сигналу с первого входа устройства 11 выделяются i старших точных разрядов у их;, т. е. и хД , и умножаются на (п-1)-ый разряд множителя А, поступившего на второй вход устройства 12. . Полученные частичные произведения Задерживаются на такт линиями 5 и б задержки соответственно и суммируются в сумматорах 7 и 3 с содержимым п-разрядных регистров 9 и 10 сдвига соответственно. После п аналогичных итераций на выходах устройства 13 и 14 получают вычислительные значения функций f: Asin ( и fg - ACOS ф соответственно. При работе устройства в режиме вычисления арксинуса на третий вход устройства 15 подаетсясигнал логическая 1, в результате выход первого сумматора 7 через третий элемент И 4 соединяется с управляющим входом блока формирования координат вектора 1. Устройство вычисляет функцию, арксинуса f -fres in Z/R, где Z, R - аргументы, f-j - значение (Ьункции, путем реализации алгоритма (1) с начальными условиями QQ О, Уд О, Х( 1/k, с выбором направления вращения вектора по закону ; sign-D(, где 0 + - промежуточное значение функции - -Z, на i-ой итерации, причем DQ -Z, цифра (n-i)-ro разряда аргу4 мента R, у -i старших точных разрядов координаты вектора у , и с конечным результатом f -frcsin Z/R Перед началом работы устройства обнуляется второй регистр 10 сдвига, а в первый регистр 9 сдвига записывается аргумент -Z, т. е. DQ -Z. Работа устройства заключается в следующем. В соответствии с алгоритмом (1) на i-ой итерации блок формирований координат вектора 1 выдает на первые входы-первого и второго элементов И 2 и 3 соответственно младшими разрядами вперед промежуточные значения координат вектора и . На первом и втором элементах И 2 и 3 по сигналу с первого входа устройства 11 выделяются i старших точных разрядов у и X ,, т. е, у и х соответственно, и умножаются на (п-1)-ый разряд аргумента R, поступившего на второй вход устройства 12. Полученные частичные произведения «( У п-м задерживаются на
