(54) ЗАГРУЗЧИК СТЕКЛОИЗДЕЛИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАГРУЗЧИК СТЕКЛОИЗДЕЛИЙ | 1971 |
|
SU301314A1 |
| Загрузчик стеклоизделий | 1976 |
|
SU695976A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ПРОИЗВОДСТВА БАРАНОЧНЫХ ИЗДЕЛИЙ | 1965 |
|
SU214451A1 |
| Загрузчик стеклоизделий | 1977 |
|
SU685639A1 |
| Сушильная установка для мелких изделий | 1987 |
|
SU1513354A1 |
| Устройство для подачи профильного проката в пресс-ножницы | 1982 |
|
SU1038116A1 |
| Переставитель стеклоизделий | 1956 |
|
SU109898A1 |
| Манипулятор для плоских стеклоизделий | 1987 |
|
SU1549743A1 |
| УСТРОЙСТВО для ЗАГРУЗКИ ШТУЧНЫХ СТЕКЛОИЗДЕЛИЙ | 1968 |
|
SU211756A1 |
| ПЕРЕКЛАДЧИК ИЗДЕЛИЙ | 1970 |
|
SU277602A1 |
Изобретение относится к устройствам для подачи стеклянных изделий в печи и может быть использовано, например, для подачи стеклодеталей кинескопов в цельностеклянных оболочках в лер подогрева перед сваркой баллонов. Известен переставитель стеклодеталей, включающий колонну, смонтированную на платформе с возможностью перемещения от привода, траверсу с установленной в ней телескопической стрелкой, дугообразные захваты, снабженные кронштейнами, механизмы поворота и подъема 1. Однако известный загрузчик не обеспечивает снятия нескольких «зделий с двухъярусной подвески конвейера с одновременной переориентировкой их в одну плоскость для укладки в два ряда на рольганг лера подогрева. Известен загрузчик стеклоизделий, включающий механическую руку с выдвигающейся штангой, снабженной захватами, и пневматическую систему, механизм регулирования угла поворота которого выполнен в виде находящейся в зацеплении с зубчатым колесом, насаженным на вал механизма подъема, зубчатой рейки, снабженной установленным на конце стопора, входящим в соответствующие пазы связанного с приводной системой стакана, на наружной поверхности которого установлены штыри, взаимодействующие с фиксатором механической руки 2. Однако известные загрузчики не обеспечивают одновременную укладку нескольких изделий с двухъярусной подвески конвейера на одну плоскость. Возможна последовательная перекладка изделий с разных высот, но необходима остановка конвейера перед снятием каждого изделия, что приводит к снижению производительности. Кроме того, в систему управления механизмом подъема необходимо ввести дополнительные устройства для обеспечения рег лировки высоты подъема, что значительно услол няет конструкцию загрузчика. Целью изобретения является повышение производительности загрузчика за счет обеспечения одновременной перекладки изделий с разных высот на одну. Указанная цель достигается за счет того, что загрузчик стеклоизделнй, содерл ащий снабженную захватом механическую руку, связанную с механизмами подъема и поворота, коническую пару и нневматическую систему, снабжен головкой с дополнительным захватом, установленной на механической руке, причем механизм подъема и поворота соединен конической парой, снабл енной делительным конусом и опорным
роликом, а захваты кинематически связаиы между собой.
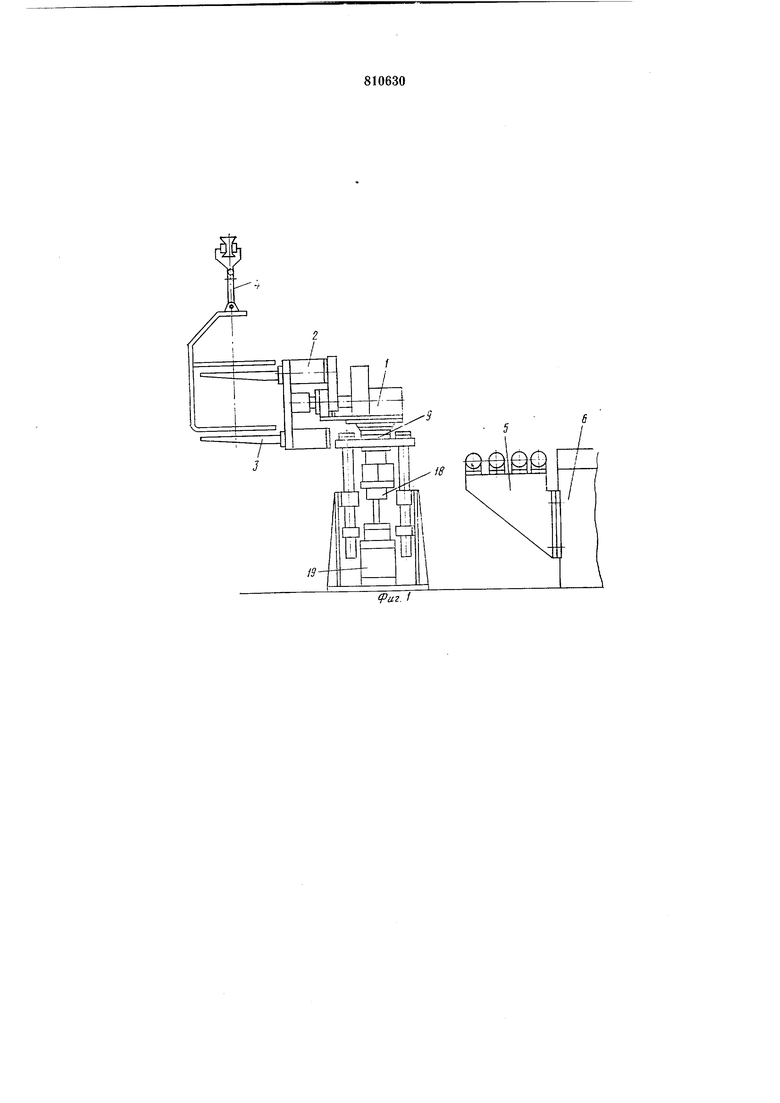
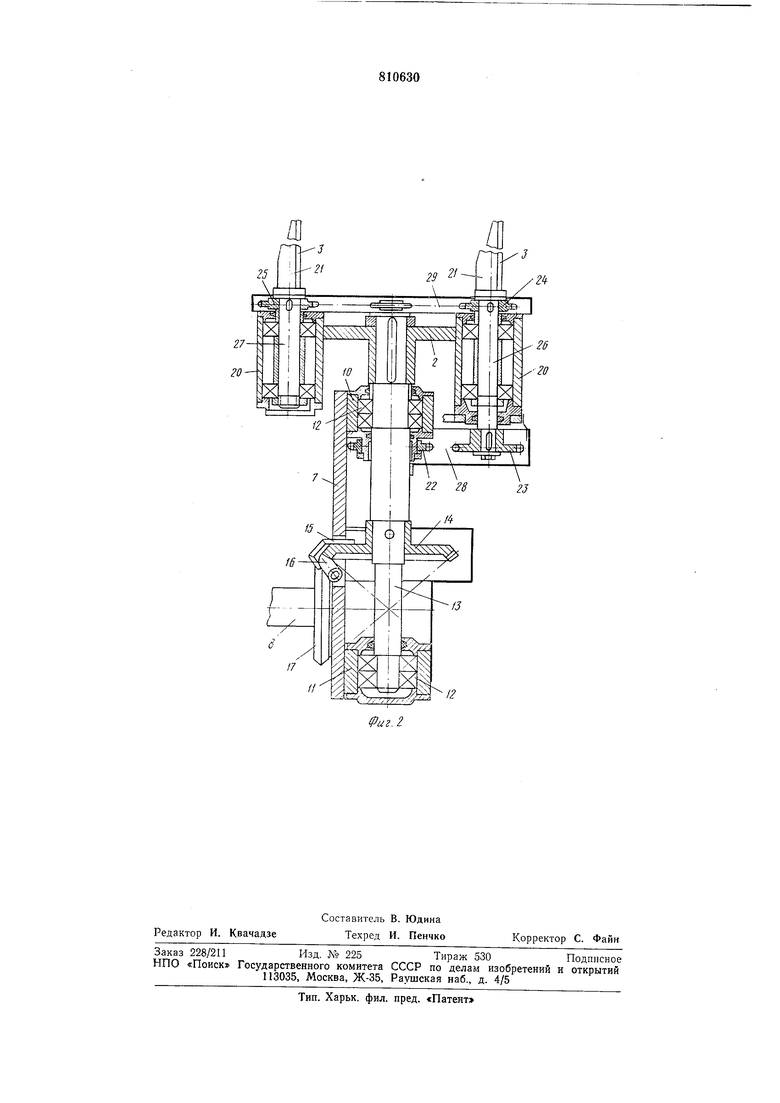
На фиг. 1 изображеи предложенный загрузчик, общий вид; на фиг. 2 изображеиа механическая рука с головкой в разрезе.
Загрузчик стеклоизделий содержит механическую руку /, снабженную головкой 2 с захватами 3 для снятия изделий с двухъярусной подвески 4 конвейера и иодачи их на рольганг 5 лера 6 подогрева.
Механическая рука ,/ закреплена на нлите 7, установленной в верхней части вала 8 механизма поворота 9. На Нлите 7 в корпусах W и .// на подшипниках качения J2 установлен вал 13, в средней части которого жестко закреплено зубчатое коническое колесо 14. Одна часть колеса 14 выполнена в виде делительного конуса, связанного через .кронштейн 15 с опорным роликом 16. Зубчатое коническое колесо 14 связано с зубчатым коническим колесом 17, одна часть которого выполнена в вйде делительного конуса. Зубчатое колесо 17 установлено на валу 8 механизма поворота 9. Механизм поворота 9 связан с механизмом подъема 18, выполненным в виде телескопического пневмоцилиндра 19. На конце вала 13 механической рукой 1 жестко установлена головка 2 с двумя корпусами 20, в которых установлены заХ|Ваты 3. К одной стороне держателей 3 приварены грузы 21. Для удержания захватов 3 постоянно в горизонтальном положении установлены две цепные передачи. Звездочка 22 неподвижно закреплена на корпусе 10, звездочки 23, 24, 25 установлены на валах 26 и 27. Звездочки 2-2 и 23 связа-ны цепью 28. Звездочки 24 и 25 связаны цепью 29. Таким образом, обеспечивается кинематическая связь между захватами 3 и валом 13 механической руки 1. Механизм подъема 18 приводится в движение при помощи пневматической системы.
Описанный загрузчик работает следующим образом.
iB исходном положении механическая рука 1 расположена в зоне конвейера. Затем пневмоцилиндр 19 поднимает механическую руку 1, захваты 3 снимают изделие с двухъярусных подвесок 4. Благодаря грузам 21, приваренным к одной стороне захватов 3, вал 13 постоянно проворачивается против часовой стрелки и прижимает опорный ролик ,16 к поверхности делительного конуса зубчатого конического колеса 14. При повороте механической руки / зубчатое колесо 14 с опорным роликом 16 скользит по делительному конусу зубчатого колеса 17 и вал 13 при этой не вращается до тех пор, пока зубчатые колеса 14 и 17 не
входят в зацепление. Нри повороте механической руки на 75° зубчатые колеса 14 и /7 входят в зацепление. Нри этом зубчатое колесо 14 вместе с валом 13 и головкой 2 начинают вращаться. Разворот головки 2 на 90° происходит одновременно с дальнейшим поворотом механической руки 1. Передаточное число конической передачи подобрано так, что при повороте механической руки / на 105° головка 2 разворачивается на 90°. При развороте головки 2 цепь 28 облегчает неподвижно установленную звездочку 22 и поворачивает через звездочку 23 вал 26 верхнего за.хвата 5 в обратное повороту головки 2 направление. Через цепь 29 и звездочки 24 н 25 синхронное движение передается на вал 27 нижнего захвата 3.
Передаточное число цепных передач равно 1. При развороте головки 2 захваты 3 постоянно остаются в горизонтальной плоскости. В конце поворота механическая рука / опускается и изделия подаются на рольганг 5 лера 6. Когда изделия полностью сходят с рольганга, механическая рука / поднимается и поворачивается в обратном направлении с одновременным разворотом головки 2 на 90°. Механическая рука / загрузчика возвращается в исходное положение.
Таким образом, конструкция механической руки с головкой обеспечивает одновременную перекладку нескольких изделий с разных высот на плоскость, что повышает производительность установки.
Формула изобретения
Загрузчик стеклоизделий, содержащий снабженную захватом механическую руку, связанную с механизмами подъема и поворота, коническую пару и пневмосистему, отличающийся тем, что, с целью повышения производительности за счет обеспечения одновременной перекладки изделий с разных высот на одну, он снабжен головкой с допол нительным захватом, установленной на механической руке, причем механизмы подъема и поворота соединены конической парой, снабженный делительным конусом и опорным роликом, а захваты кинематически связаны между собой.
Источники информации, принятые во внимание при экспертизе:
(PU2. /
17
ft
12
