(54) ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для листовых изделий | 1973 |
|
SU637316A1 |
| Схват манипулятора | 1980 |
|
SU905063A1 |
| Автоматизированный пресс для объемной горячей штамповки заготовок | 1989 |
|
SU1804943A1 |
| Захват | 1976 |
|
SU558789A1 |
| Исполнительный механизм имитатора пониженной гравитации | 1978 |
|
SU765686A1 |
| Захват | 1977 |
|
SU663577A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022777C1 |
| Захват | 1977 |
|
SU667396A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2274544C1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1639846A1 |
I
Изобретение относится к машинострйг ению и может быть испольаовешо, на- пример в промышленных роботах и мани пуляторах.
Известно грузозахватное устройство содержащее корпус, рычаги с зажимными призматическими губками и привод l.
Оанако такое грузозахватное устройство не обеспечивает постоянного положения оси симметрии груза шшицдри.ческой формы относительно корпуса грузозахватного устройства при работе с грузами в широком диапазоне размеров их захватываемых поверхностей. Это приводит к тому, что точки .позиционирования промышленного робота при работе с такими грузами должны изменяться в пространстве в зависимости от диаметра.захватываемых грузов.
Цель изобретения - расш1фение технологических возможностей при сохранении постоянного положения осей грузов цилиндрической формы, независимо от их диаметра, .относительно корпуса.
Поставленная цель достигается тем, Ч.ТО грузозахватное устройство снабжево двухконтуряым шарнирным механизмом, содержаишм механизм параллелограмма и кулисный механизм, прячем общим звеном этих механизмов является кулиса, а каждая зажимная . лрЕзматическац губка закреплена на звене механвзма параллелограмма, противоположном кулисе.
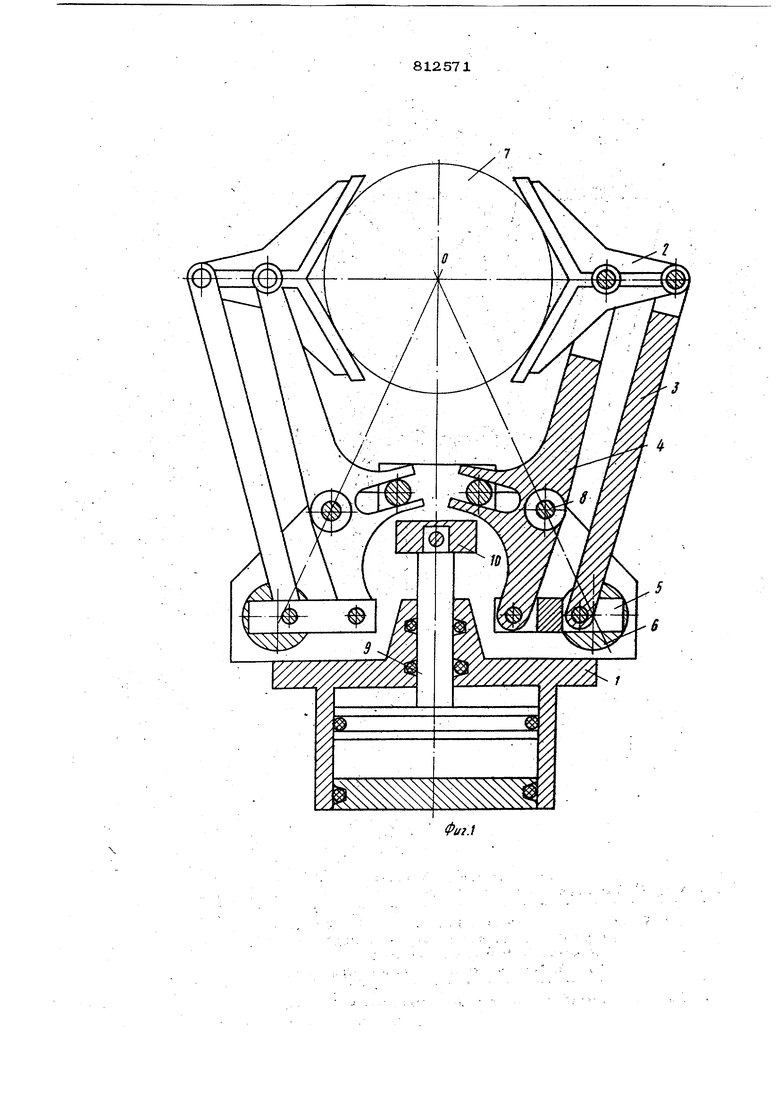
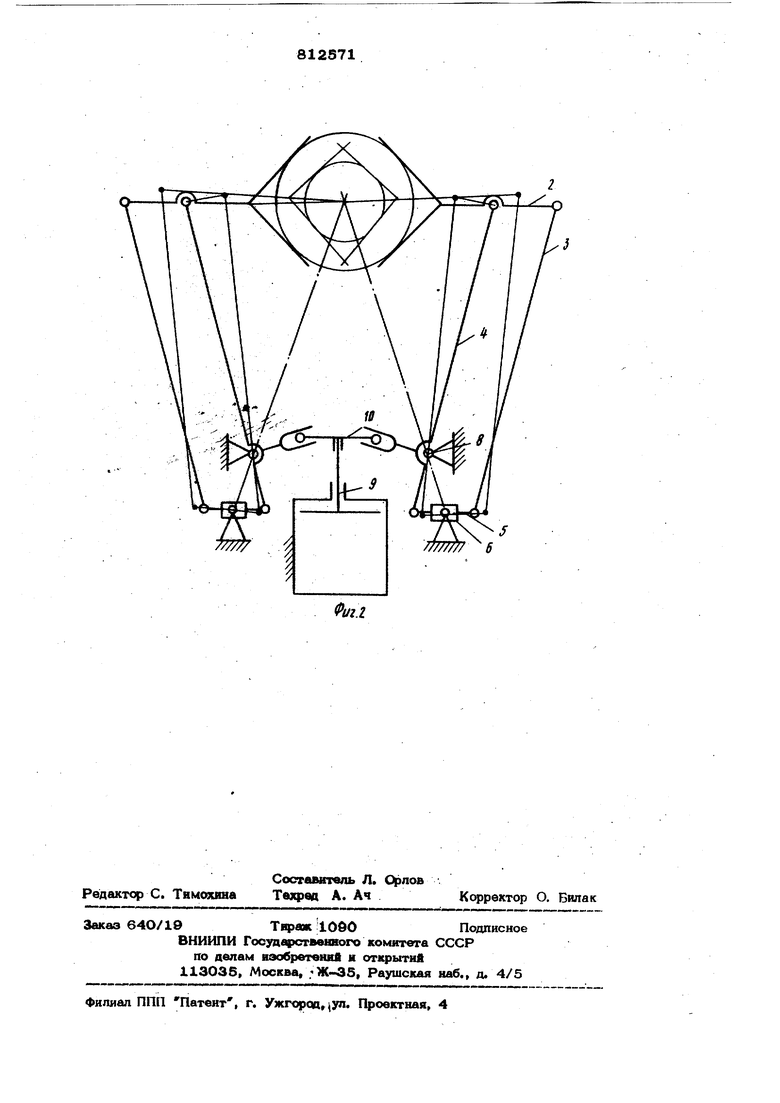
На фиг. 1 изображено 1федлагаемое устройство, общий вид на фиг. 2 - его кинематическая схема.
Грузозахватное устройство состоит иэ корпуса 1, рычагов с зажимными прйзматнч ческими губками 2, каждый из которых. соединен с двухконтурньш шарнирным механизмом, включающим мех 1низм. параллелограмма и кулисный механизм. Каждый механизм параллелограмма состоит из рычага с зажимной призматической губкой 2, щатуна 3, рычага 4 И части кулисы 5. Шарнир, удерживающий рычаг 4, установлен на корпусе 1. Кулис3ный механизм кроме кулисы 5 содержит также поворотный камень 6, шаршфно устаноеленный на корпусе 1. Размеры звеньев подобраны так, что ось захватываемого 7, шарнир 8 и ось вращения поворотного камня 6 расположены на одной прямой в произвольном положении механизма. Шток 9 силового цилиндра и рычаг 4 шарнирно связаны между собой звеном 10. Грузозахватное устройство работает следующим образом. В исходном положении рычаги с зажимными призматическими губками 2 разведены шток силового цилиндра находится в верхнем положении. При подаче давления в верхнюю полость силово цйптдра шток 9 в корпусе 1 опускается вниз. Движение штока 9 через звено Ю передается рычагу 4, который совер шает качательное движение относительно оси шарнира 8. При этом рычаг с зажимной призматической губкой 2 при действии шатуна 3, кулисы 5 и поворот ного камня 6 совершает сложное движение к оси захватываемого груза 7. Это движение состоит из вращения совм стно. с f braaroM с призматической гу кой 2 относительно оси шарнира 8 и вр 71 щения относительно рычага 4. При этом ось шарнира ; 8, ось вращения поворотного камня 6 и ось захватываемого груза 7 всегда находятся на одной линии, а расстояние от оси симметрии груза до захвата остается постоянным. Формулаизобретения Грузозахватное устройство, содержащее Kqpnyc, рычаги с зажимными призматическими губками к привод, о т л ич а ю щ е е с я тем, что, с целью расширения технологических возможностей при сохранении постоянного положения ; осей грузов цилиндрической формы, независимо от их диаметра, относительно корпуса, оно снабжено даухконтурным шарнирным механизмом, включающим механизм параллелограмма и ку/1исньш механизм, причем общим звеном этих механизмов является кулиса, а каждая зажимная призматическая губка закреплена на звене механизма параллелограмма, противоположном кулисе. Источники информации, принятые во внимание при экспертизе 1. Заявка Японии № 4934552, кл. В 25СГ 15/00, опублик. 1974.
