(54) СХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1983 |
|
SU1138316A1 |
| Схват манипулятора | 1981 |
|
SU1030156A1 |
| Грузозахватное устройство | 1979 |
|
SU812571A1 |
| Схват | 1982 |
|
SU1077781A1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Зубообрабатывающий модуль | 1986 |
|
SU1364442A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| Захват манипулятора | 1980 |
|
SU876422A1 |
| Схват | 1983 |
|
SU1079429A1 |
1
Изобретение относится к машиностроению и может быть использовано, например, в промышленных роботах и манипуляторах.
Известен схват манипулятора, содержащий корпус, зажимные губки, одна из которых призматическая, а другая плоская, причем губки размещены на пантографном механизме, связанном с приводом прямолинейного перемещения 1.
Недостатками известного схвата являются узкие технологические возможности и низкая точность позиционирования.
Цель изобретения - расщирение технологических возможностей и повышение точности позиционирования.
Цель достигается тем, что пантографный механизм выполнен в виде основного и дополнительного параллелограммов, причем одно из звеньев основного параллелограмма жестко связано с приводом прямолинейного перемещения и на противоположном звене этого параллелограмма размещена призматическая губка, а одно из смежных звеньев этого параллелограмма шарнирно связано со звеном дополнительного параллелограмма, причем смежное с ним звеио
дополнительного параллелограмма жестко связано с корпусом, а на противоположном ему звене размещена плоская губка.
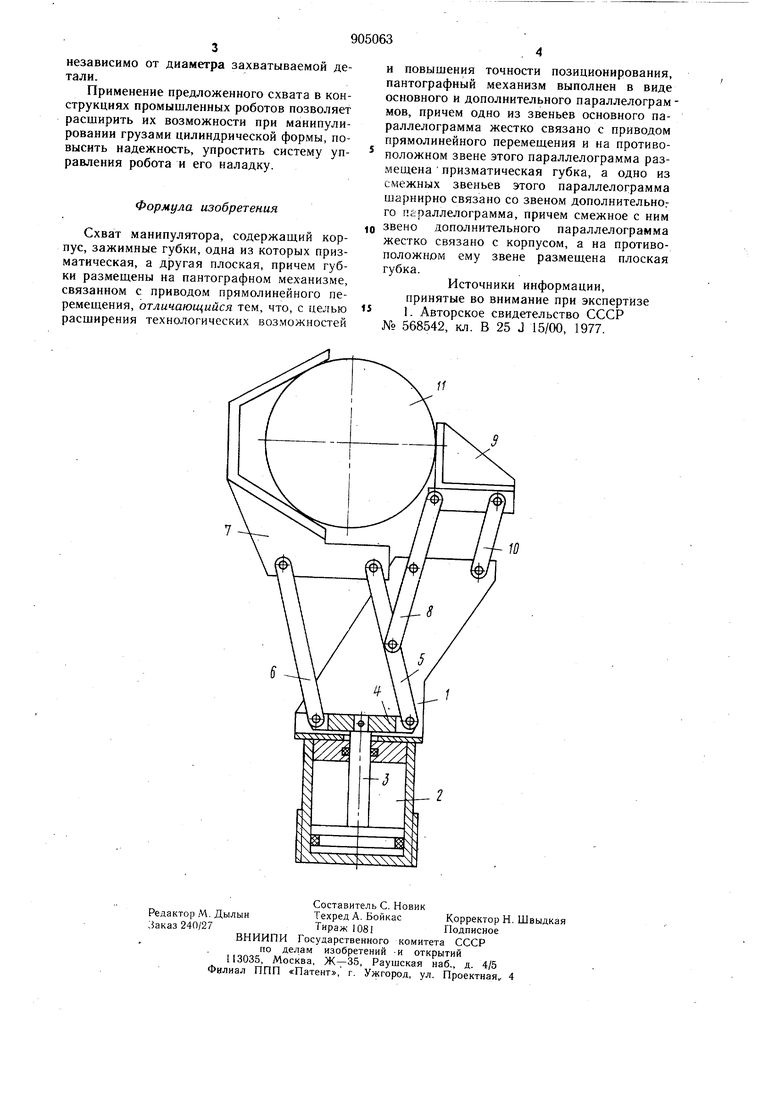
На чертеже изображен схват, общий вид.
Предлагаемый схват устроен следующим образом. В корпусе 1 установлен силовой цилиндр 2 со щтоком 3, который жестко связан со звеном 4, входящим в механизм основного параллелограмма, включающего, кроме того, звенья 5 и 6 и призматическую губку 7. В то же время дополнительный параллелограмм включает звено 8, связанное со звеном 4, плоскую губку 9 и звено 10, а корпус 1 также является одним из звеньев этого параллелограмма.
Схват работает следующим образом.
15
Звено 4, перемещаясь от щтока 3 силового цилиндра 2 относительно корпуса 1, приводит в движение все подвижные звенья манипулятора. При этом губка 7 перемещается прямолинейно в направлении, перпендикулярном перемещению щтока 3, и цилиндрическая деталь 11 зажимается плоской 9 и призматической 7 губками. При этом положение центра детали остается на линии перемещения призматической губки
независимо от диаметра захватываемой детали.
Применение предложенного схвата в конструкциях промышленных роботов позволяет расширить их возможности при манипулировании грузами цилиндрической формы, повысить надежность, упростить систему управления робота и его наладку.
Формула изобретения
Схват манипулятора, содержащий корпус, зажимные губки, одна из которых призматическая, а другая плоская, причем губки размещены на пантографном механизме, связанном с приводом прямолинейного перемещения, отличающийся тем, что, с 1елью расширения технологических возможностей
и повышения точности позиционирования, пантографный механизм выполнен в виде основного и дополнительного параллелограм мов, причем одно из звеньев основного параллелограмма жестко связано с приводом прямолинейного перемещения и на противоположном звене этого параллелограмма размещена призматическая губка, а одно из смежных звеньев этого параллелограмма щарнирно связано со звеном дополнительно: го параллелограмма, причем смежное с ним
звено дополнительного параллелограмма жестко связано с корпусом, а на противоположном ему звене размещена плоская губка.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 568542, кл. В 25 J 15/00, 1977.
ff
