(54) МЕХАНИЗМ ШАГАНИЯ ЭКСКАВАТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩЕЕ ХОДОВОЕ ОБОРУДОВАНИЕ | 1993 |
|
RU2034963C1 |
| Гидропривод шагающего ходового оборудования экскаватора | 1987 |
|
SU1460142A1 |
| Опорно-ходовая часть тяжелых машин | 1983 |
|
SU1129298A1 |
| Механизм шагания экскаватора | 1982 |
|
SU1086087A1 |
| МЕХАНИЗМ ШАГАНИЯ | 1968 |
|
SU217280A1 |
| Шагающий экскаватор | 1987 |
|
SU1454918A1 |
| Механизм шагания экскаватора | 1980 |
|
SU947307A1 |
| Опорное устройство шагающей машины | 1973 |
|
SU620555A1 |
| Механизм шагания экскаватора | 1982 |
|
SU1073393A1 |
| Механизм шагания экскаватора | 1979 |
|
SU825806A1 |
1
Изобретение относится к горнотранспортным машинам, а именно к ходовому оборудованию экскаваторов.
Известны шагаюшие механизмы, выполненные в виде кривошипных систем, включаюш,их опорную раму и опорные башмаки, шарнирно связанных с корпусом экскаватора 1.
Привод механизмов, выполненных в виде кривошипных систем, осушествляется от электродвигателя, связанного с исполнительным органом через редуктор и открытые передачи. Эксплуатационная надежность таких механизмов вследствие малого срока службы зубчатых колес (около 2-х лет), недостаточна. Кроме того, механическая связь между исполнительными механизмами не обеспечивает прямолинейного движения машины при различных условиях правого и левого опорных башмаков с грунтом.
Известны также механизмы шагания экскаваторов, включаюшие опорные башмаки с механизмами подъема и перемешения и приводы, выполненные в виде силовых цилиндров 2.
Недостатком такой конструкции является низкая эксплуатационная надежность устройства.
Цель изобретения - повышение эксплуатационной надежности.
Поставленная цель достигается тем, что механизм подъема каждого башмака выполнен в виде кинематической пары, образованной верхним и нижним звеньями, при этом верхнее звено шарнирно связано с корпусом экскаватора и выполнено с упором, а нижнее - шарнирно одним концом с опорным башмаком, а другим - со штоком силового цилиндра привода.
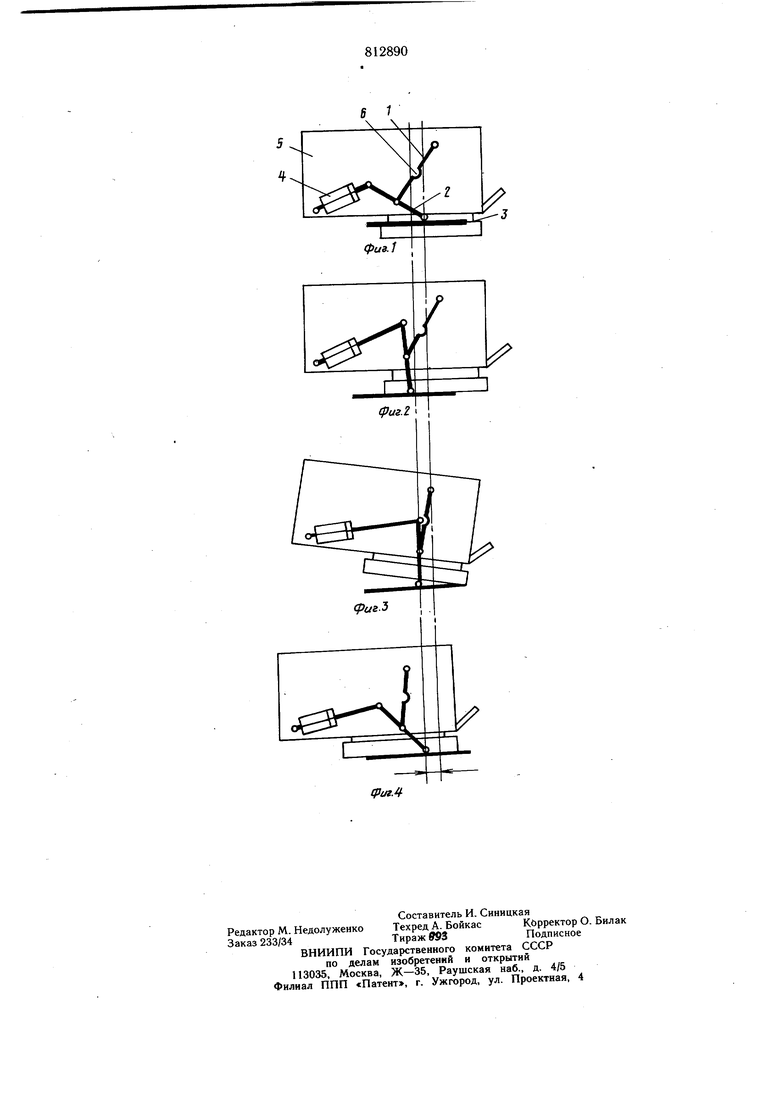
На фиг. 1 изображено рабочее положение экскаватора; на фиг. 2 - начало подъема экскаватора; на фиг. 3 - конец подъема и начало движения экскаватора; на фиг. 4 - конец движения экскаватора.
Механизм шагания экскаватора содержит верхнее звено 1 и нижнее звено 2, образующих кинематическую пару. Нижнее звено шарнирно связано с опорным башмаком 3 и штоком цилиндра 4, шарнирно установленного на корпусе экскаватора 5. Верхнее звено 1 шарнирно связано с корпусом экскаватора и снабжено упором 6.
Перемещение экскаватора происходит следующим образом.
В рабочем положении щток цилиндра 4 втянут и опорные бащмаки 3 занимают крайнее верхнее положение. При поступлении рабочей жидкости в поршневую полость цилиндра 4 шток выдвигается, нижнее звено 2 поворачивается вокруг шарнира опорного башмака и перемещает его в крайнее нижнее положение. Экскаватор 5 начинает подниматься. .При дальнейшем выдвижении штока заплечики нижнего звена 2 входят в зацепление с упором 6 верхнего звена 1, звенья образуют одну стойку и экскаватор за счет поворота на стойке вокруг шарнира верхнего звена начинает перемещаться. После окончания шага поток жидкости направляется в штоковую полость цилиндра, шток втягивается, экскаватор опускается. При дальнейшем втягивании штока в цилиндр звенья 1 и 2 займут исходное положение, а опорные башмаки 3 поднимутся вверх. Затем цикл повторяется.
Исключение двух подъемных цилиндров значительно упрощает автоматику управления шагающим механизмом, снижает трудозатраты на его изготовление и повышает эксплуатационную надежность.
Формула изобретения
Механизм шагания экскаватора, включающий опорные башмаки с механизмами подъема и перемещения и приводы, выполненные в виде силовых цилиндров, отличающийся тем, что, с целью повышения эксплуатационной надежности, механизм подъема каждого башмака выполнен в виде кинематической пары, образованной верхним и нижним звеньями, при этом верхнее звено шарнирно связано с корпусом экскаватора и выполнено с упором, а нижнее - шарнирно одним концом с опорным башмаком, а другим - со штоком силового цилиндра привода.
Источники информации,
принятые во внимание при экспертизе
