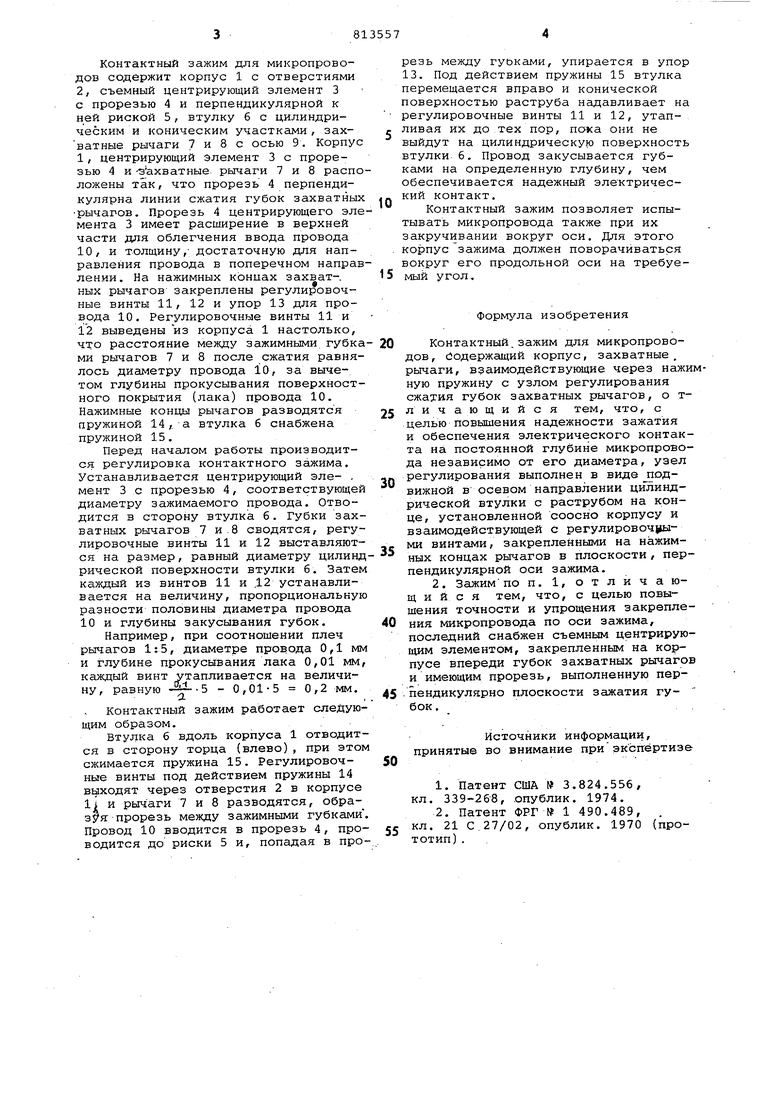
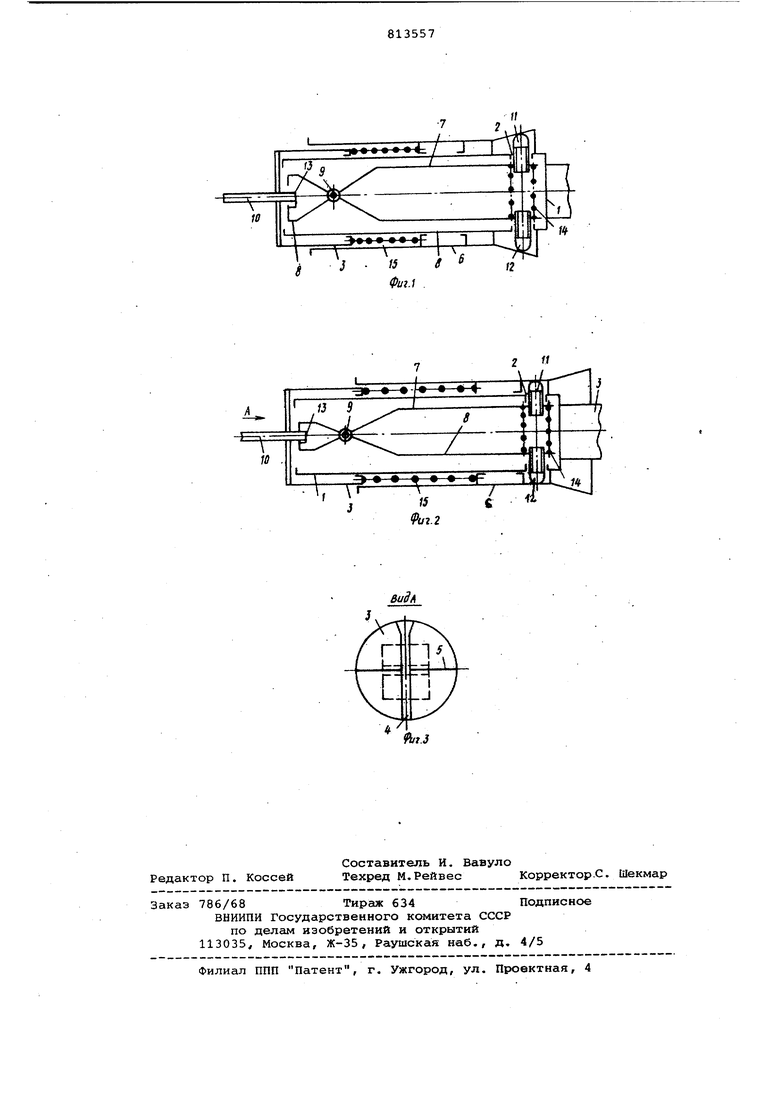
- .4 Изобретение относится к точному приборостроению и может быть использовано, в частности,в электроизмерительной технике для зажатия микропроводов с поверхностным покрытием диаметром 0,15 мм и менее при их про верке. Известны зажимы, имеющие корпусе, .зажимную цангу с упором для ограничения длины вводимого в зажга провода и лажимную гайку til. . Недостатками такого зажима являются невозможность точного зажима проводов малого диаметра и необходимость предварительной зачистки кон цов провода для обеспечения электрическо о контакта. У. Известен зажим, содержащий корпус захватные рычаги, нажимную пружину и узел регулирования сжатия рубок 2 Недостатками такого зажима являются невозможность точного микропровода по оси зажима, а также невозможность надежного зажатия проводов разного диаметра. Цель изобретения - повьииение надежности зг1жатия микропроводов по оси зажима с обеспечением электричес ;кого контакта на постоянной глубине микропровода независимо от его диаметра. Указанная цель достигается тем, что узел регулирования сжатия губок выполнен в виде подвижной в сеевом направлении цилиндрической втулки с раструбом на конце, установленной соосно корпусу ивзаимодействующей с регулировочными винтами, закрепленными на Нс1жимкых концах рычагов в плоскости, перпендикулярной оси зажима. На переднем конце зажима установлен центрирующий элемент, имеющий прорезь по диаметру провода, выполненную перпендикулярно плоскости зажатия губок. Такое выполнение згокима, а также введение в него упора, ограничившощего длину зажимаемого конца провода, обеспечивает точную фиксацию провода по трем координатам и надежное его зажатие с обеспечением электрического контакта, необходи мое для проведения испытания проводов. На фиг. 1 схематично изображен зажим, с разведенными губками захватных рычагов ; на фиг. 2 - то же, со сжатыми губками, на фиг. 3 изображен вид А на фиг. 2.
Контактный зажим для микропроводов содержит корпус 1 с отверстиями 2, съемный центрирующий элемент 3 с прорезью 4 и перпендикулярной к ней риской 5, втулку б с цилиндрическим и коническим участками, захватные рычаги 7 и 8 с осью 9. Корпус 1, центрирующий элемент 3 с прорезью 4 и -эахватные рычаги 7 и 8 расположены Так, что прорезь 4 перпендикулярна линии сжатия губок захватных рычагов. Прорезь 4 центрирующего элемента 3 имеет расширение в верхней части для облегчения ввода провода 10, и толщину,- достаточную для направления провода в поперечном направлении. На нажимных концах захват-, ных рычагов закреплены регулировочные БИНТЫ 11, 12 к упор 13 для провода 10. Регулировочные винты 11 и 12 выведены из корпуса 1 настолько, что расстояние между зажимными губками рычагов 7 и 8 после сжатия равнялось диаметру провода 10, за вычетом глубины прокусывания поверхностного покрытия (лака) провода 10. Нажимные концы рычагов разводятся пружиной 14 ,. а втулка б снабжена пружиной 15.
Перед началом работы производится регулировка контактного зажима. Устанавливается центрирующий эле- . мент 3 с прорезью 4, соответствующей диаметру зажимаемого провода. Отводится в сторону втулка б. Губки захватных рычагов 7 и.В сводятся, регулировочные винты 11 и 12 выставляются на размер, равный диаметру цилиндрической поверхности втулки 6. Затем каждый из винтов 11 и .12 устанавливается на величину, пропорциональную разности половины диаметра провода 10 и глубины закусывания губок.
Например, при соотношении плеч рычагов 1:5, диаметре провода 0,1 мм и глубине прокусывания лака 0,01 мм, каждый винт утапливается на величину, равную - 0,01-5 0,2 мм.
контактный зажим работает следующим образом..
Втулка б вдоль корпуса 1 отводится в сторону торца (влево), при этом сжимается пружина 15. Регулировочные винты под действием пружины 14 выходят через отверстия 2 в корпусе li и рычаги 7 и 8 разводятся, образуя прорезь между зажимными губками . Провод 10 вводится в прорезь 4, проводится до риски 5 и, попадая в прорезь между гуьками, упирается в упор 13. Под действием пружины 15 втулка перемещается вправо и конической поверхностью раструба надавливает на регулировочные винты 11 и 12, утапf ливая их до тех пор, пока они не выйдут на цилиндрическую поверхность втулки 6. Провод закусывается губками на определенную глубину, чем обеспечивается надежный электрический контакт.
Контактный зажим позволяет испытывать микропровода также при их закручивании вокруг оси. Для этого . корпус зажима должен поворачиваться
вокруг его продольной оси на требуемый угол.
Формула изобретения
Контактный,зажим для микропроводов, Содержащий корпус, захватные, рычаги, взаимодействующие через нажимную пружину с узлом регулирования сжатия губок захватных рычагов, о тл и ч а ю щ и и с я тем, что, с целью повышения надежности зажатия и обеспечения электрического контакта на постоянной глубине микропровода независимо от его диаметра, узел
регулирования выполнен в виде подвижной в осевом направлении цилиндрической втулки с раструбом на конце, установленной соосно корпусу и взаимодействующей с регулировочрыми винта1ми, закрепленными на нажимных концах рычагов в плоскости , перпендикулярной оси зажима.
2. Зажимпо п. 1, отличающийся тем, что, с целью повышения точности и упрощения закрепления микропровода по оси зажима,
последний снабжен съемным центрирующим элементом, закрепленным на корпусе впереди губок захватных рычагов и имеющим прорезь, выполненную перпендикулярно плоскости зажатия губок .
Источники информации, принятые во внимание при экспертизе
1.Патент США 3.824.556, кл. 339-268, .опублик. 1974.
2.Патент ФРГ 1 490.489,
кл. 21 С 27/02, опублик. 1970 (прототип) .
J - 9
12
ФигА .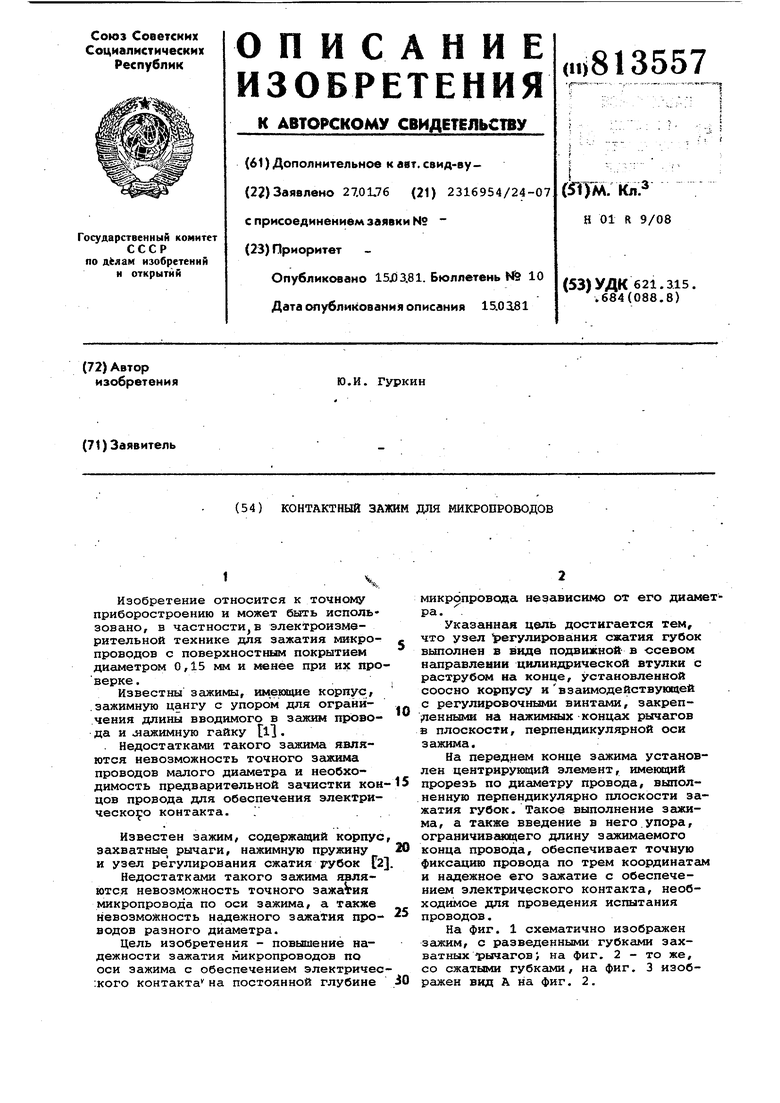
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи листового материала в зону обработки | 1987 |
|
SU1442301A1 |
| Устройство для прокатки колец шарикоподшипников | 1988 |
|
SU1803240A1 |
| Многопозиционная машина для вставки книжных блоков в переплетные крышки | 1956 |
|
SU119170A1 |
| Захват | 1981 |
|
SU984862A1 |
| ХИРУРГИЧЕСКИЙ ЗАЖИМ И ИНСТРУМЕНТ ДЛЯ РАБОТЫ С НИМ | 1996 |
|
RU2116761C1 |
| Устройство для контактной стыковой сварки многопроволочных изделий | 1981 |
|
SU990454A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Захват для испытания на усталостную прочность круглого стержневого образца | 2024 |
|
RU2837991C1 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
| Вакуумный манипулятор | 1985 |
|
SU1315293A1 |
2
