Фиг.З
00 СП
ю
-л
со
Изобретение относится к машиностроению, а именно к захватным устройствам, например, руки промышленных роботов и манипуляторов.
Целью изобретения является повышение надежности работы за счет разгрузки зубчатого зацепления.
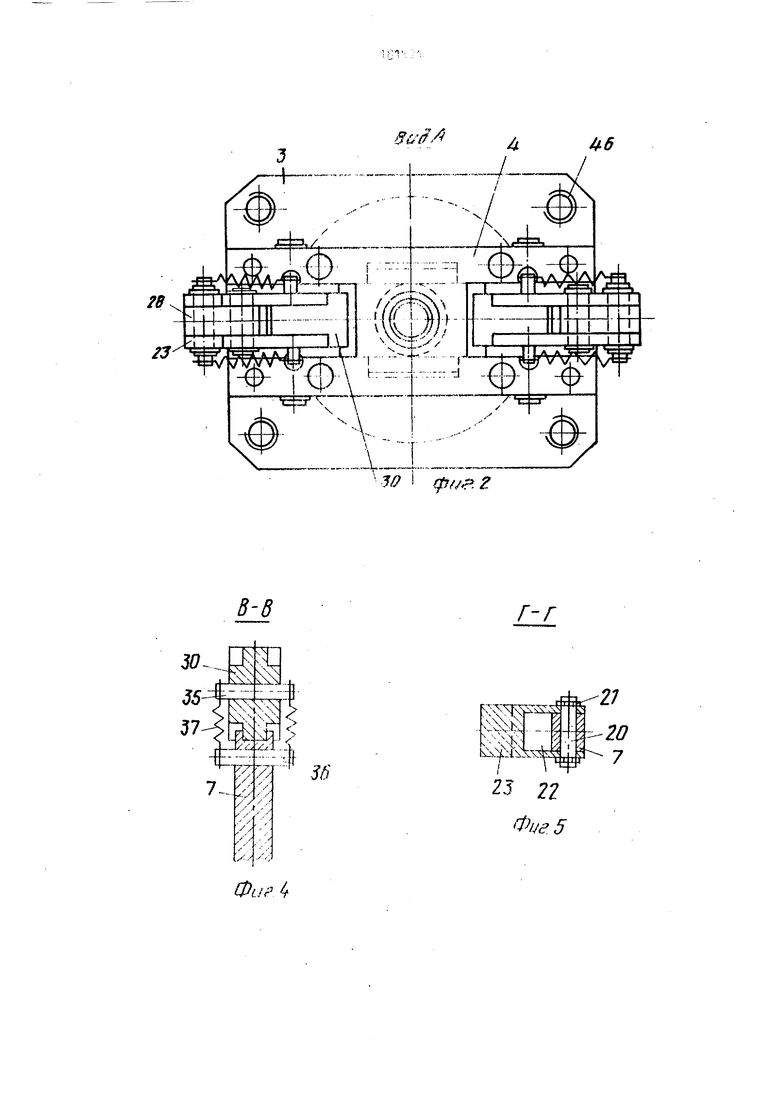
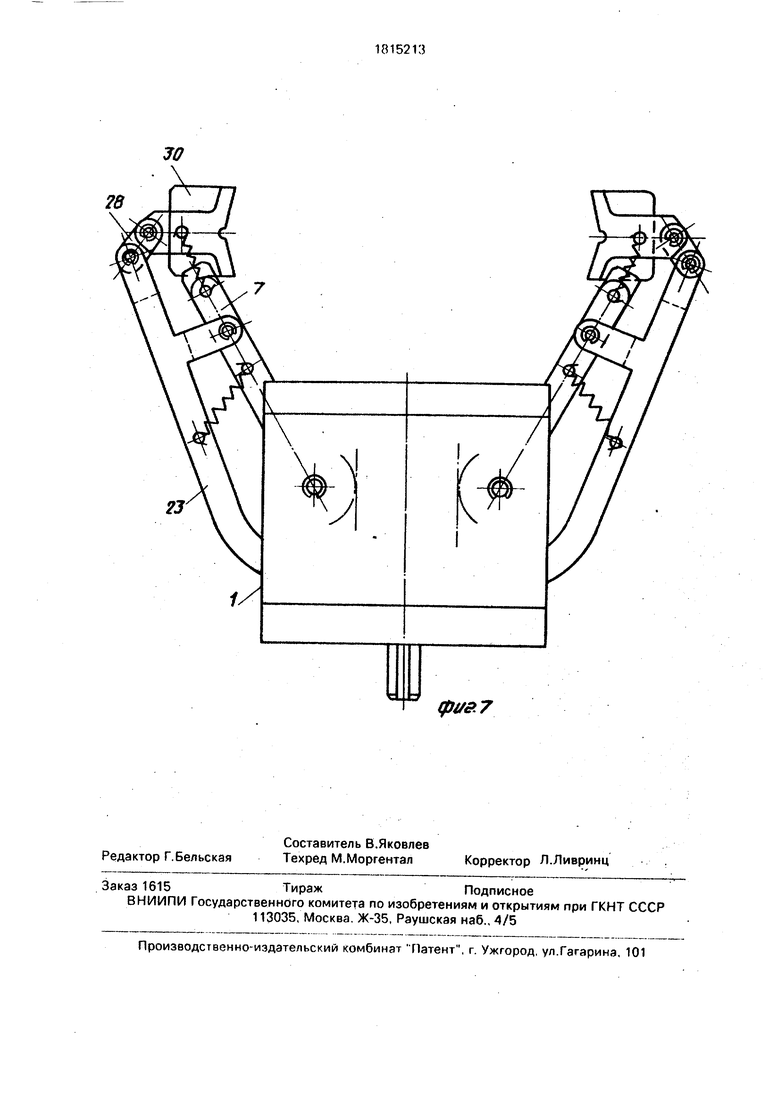
На фиг. 1 изображен общий вид захватного устройства; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1: на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг. 1; на фиг. 6 показан пример использования захватного устройства для удержа- ния деталей цилиндрической и прямоугольной формы; на фиг. 7 - захватное устройство с широко разведенными захватными губками.
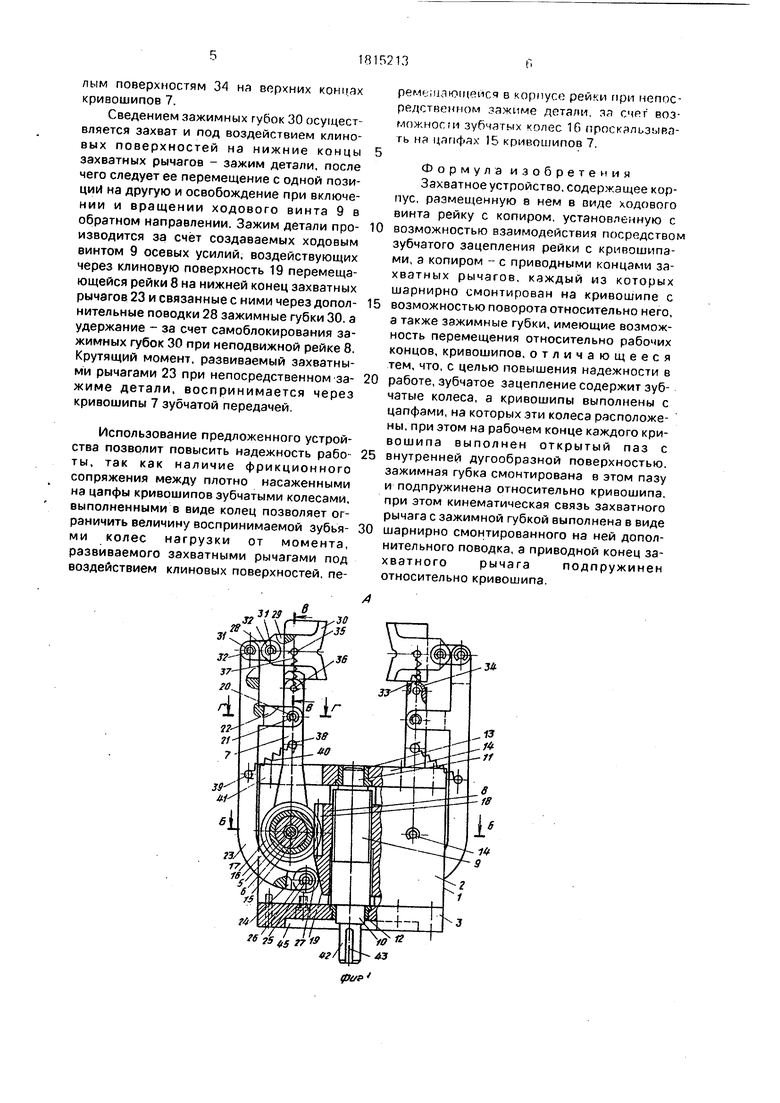
Захватное устройство содержит корпус 1, состоящий из стенок 2, соединенных посредством винтов и штифтов с крышками 3 и 4 (фиг. 1). В корпусе 1 шарнирно, посредством пальцев 5 с надетыми на них игольча- тыми подшипниками 6 закреплены кривошипы 7, Последние взаимодействуют с рейкой 8, навинченной с возможностью перемещения в корпусе 1 на ходовой винт 9, симметрично размещенный по отношению к осям поворота кривошипов 6. Цапфы 10 и 11 ходового винта 9 размещены соответственно во втулках 12 и 13, запрессованных в крышках 3 и 4. Заплечик цапфы 10 упирается во внутренний торец втулки 13, что гарантирует ходовому винту 9 постоянство осевого положения. Палец5 каждого из кривошипов 7 запрессован в стенках 2 корпуса 1 и дополнительно фиксируется стопорными кольцами 14. В нижней части кривошипы 7 снабжены (фиг. 1 и 3) цапфами 15. образующими с плотно насаженными на них зубчатыми колесами 16, выполненными в форме колец, фрикционное соединение. Зубья 17 колес 16 входят в зацепление с зубьями 18 рейки 8. На нижней части рейки 8 выполнены клиновые поверхности 19. С кривошипами 7 (фиг. 1 и 5) посредством осей 20, стопорных колец 21 и проушины 22 шарнирно сопряжены захватные рычаги 23. На приводном конце захватного рычага 23 имеется проушина 24, в которой на оси 25, стопорящейся кольцами 26, насажен ролик 27. Последний контактирует с клиновой поверхностью 19 рейки 8 Верхние концы захватных рычагов 23 снабжены дополнительными поводками 28 шарнирно соединенными с ними и с проушинами 29 зажимных губок 30 посредством осей 31 и стопорных колен 32 (фиг. 1).
На рабочих концах кривошипов 7 вы полнены открытые пазы 33. г. внутренними
дугообразными поверхностями 34. Зажимные губки 30 размещены в пазах 33 с возможностью перемещения на полукруглых поверхностях 34. В зажимные губки 30 запрессованы оси 35, в верхние концы кривошипов 7 - оси 36. За концы осей 35 и 36 зацеплены пружины 37, предназначенные дпя постоянного прижатия зажимных губок 30 к полукруглым поверхностям 34 криво0 шипов 7 (фиг. 1 и 4).
За концы осей 38 и 39, запрессованных, соответственно, в кривошипы 7 и захватные рычаги 23, зацеплены пружины 40, благодаря которым ролик 27 постоянно контактиру5 етс клиновой поверхностью 19 рейки 8.
В крышке 4 корпуса 1 для обеспечения прохождения кривошипов 7 при сведении или разведении зажимных губок 30 выполнены пазы 41.
0 На ходовом винте 9, для присоединения к механизму привода имеется хвостовик 42 со шпонкой 43. Рейка 8 для перемещения в корпусе 1 снабжена направляющими 44 (фиг. 3).
5 Для присоединения захватного устройства к руке робота или манипулятора в крышке 3 имеется центрирующая проточка 45 и резьбовое присоединительное отверстие 46.
0 Захватное устройство работает следующим образом.
Робот или манипулятор подводит захватное устройство к детали так. чтобы последняя оказалась в зоне между
5 разведенными зажимными губками 30. Рейка 8 при этом занимает на ходовом винте 9 верхнее положение, а ролики 27 захватных рычагов 23 контактируют с клиновыми поверхностями 19, благодаря действию пру0 жин 40.
По команде с робота или манипулятора включается привод ходового винта 9, рейка перемещается в корпусе 1 по ходовому винту 8 сверху вниз и сцепляясь с зубчатыми
5 колесами 16, плотно насаженными на цапфы 15 кривошипов 7 поворачивает последние. Кривошипы 7 увлекают за собой захватные рычаги 23 за ось 20 связующего их шарнира. Захватные рычаги при взаимо0 действии роликов 27 с клиновыми поверхно- стями 19 перемещающейся рейки 8 поворачиваются относительно кривошипов 7 на оси 20 верхними концами в сторону захватываемой детали, перемещая оси 31,
5 связующие шарнирно верхние концы захватных рычагов 23 с дополнительными поводками 28. Последние при этом поворачиваются и перемещают зажимные губки 30 поступательно в открытых пазах 23. Зажимные губки 30 скользят по полукруглым поверхностям 34 на верхних концах кривошипов 7.
Сведением зажимных губок 30 осуществляется захват и под воздействием клиновых поверхностей на нижние концы захватных рычагов - зажим детали, после чего следует ее перемещение с одной позиций на другую и освобождение при включении и вращении ходового винта 9 в обратном направлении. Зажим детали про- изводится за счёт создаваемых ходовым винтом 9 осевых усилий, воздействующих через клиновую поверхность 19 перемещающейся рейки 8 на нижней конец захватных рычагов 23 и связанные с ними через допол- нительные поводки 28 зажимные губки 30. а удержание - за счет самоблокирования зажимных губок 30 при неподвижной рейке 8. Крутящий момент, развиваемый захватными рычагами 23 при непосредственном за- жиме детали, воспринимается через кривошипы 7 зубчатой передачей.
Использование предложенного устройства позволит повысить надежность рабо- ты, так как наличие фрикционного сопряжения между плотно насаженными на цапфы кривошипов зубчатыми колесами, выполненными в виде колец позволяет ограничить величину воспринимаемой зубья- ми колес нагрузки от момента, развиваемого захватными рычагами под воздействием клиновых поверхностей, переметающейся в корпусе рейки при непосредственном зажиме детали, за смет воз- можногли зубчатых колес 10 проскальзывать из цапфах 15 кривошипов 7.
Формула изобретения Захватное устройство, содержащее корпус, размещенную в нем в виде ходового винта рейку с копиром, установленную с возможностью взаимодействия посредство зубчатого зацепления рейки с кривошипами, а копиром - с приводными концами захватных рычагов, каждый из которых шарнирно смонтирован на кривошипе с возможностью поворота относительно него, а также зажимные губки, имеющие возможность перемещения относительно рабочих концов, кривошипов, отличающееся тем, что, с целью повышения надежности в работе, зубчатое зацепление содержит зубчатые колеса, а кривошипы выполнены с цапфами, на которых эти колеса расположены, при этом на рабочем конце каждого кри- вошипа выполнен открытый паз с внутренней дугообразной поверхностью, зажимная губка смонтирована в этом пазу и подпружинена относительно кривошипа, при этом кинематическая связь захватного рычага с зажимной губкой выполнена в виде шарнирно смонтированного на ней дополнительного поводка, а приводной конец захватного рычага подпружинен относительно кривошипа.
В-В
г-г
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1989 |
|
SU1708603A1 |
| Схват манипулятора | 1983 |
|
SU1071421A1 |
| Захватное устройство | 1986 |
|
SU1430261A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Захватное устройство промышленного робота | 1985 |
|
SU1313697A1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Захватное устройство | 1984 |
|
SU1199614A1 |
| Захватное устройство | 1985 |
|
SU1283092A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |

Использование: в машиностроении, в захватных устройствах промышленных роботов и манипуляторов. Сущность изобретения: снабжение кривошипов 7 цапфами 15, на которых расположены зубчатые колеса 16 позволяет повысить надежность работы захватного устройства при зажиме за счет возможности зубчатых колес проскальзывать на цапфах 15 кривошипов. 7 ил.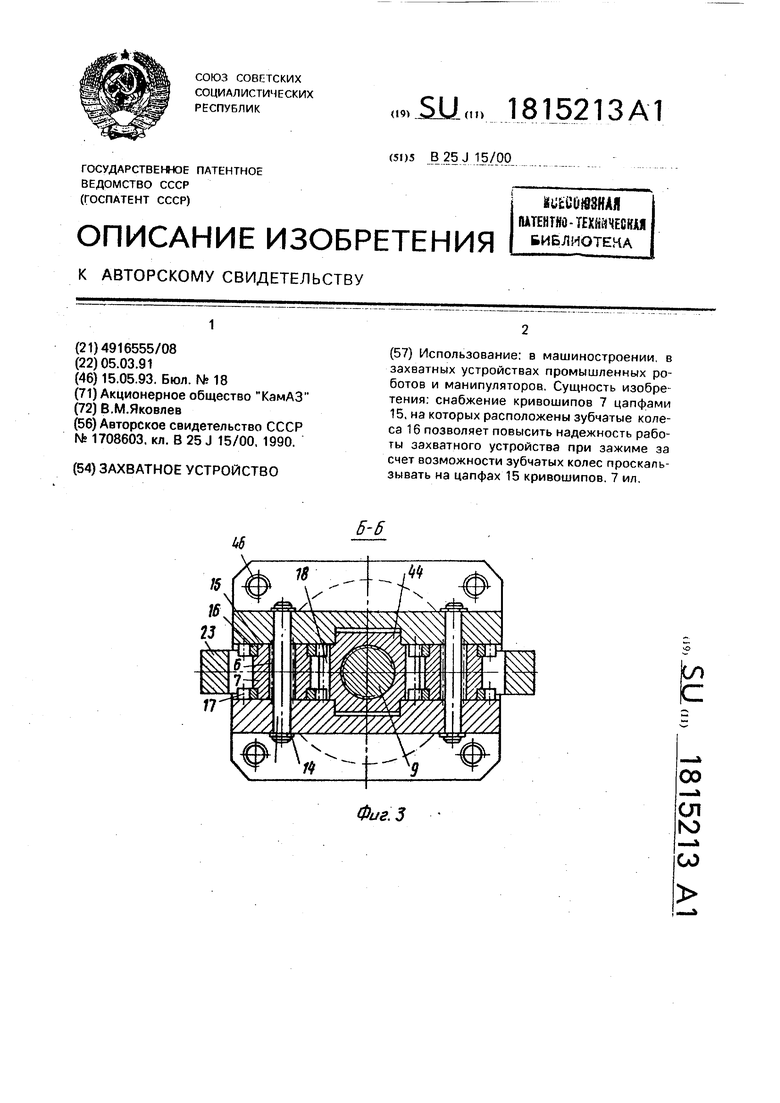
Фи 4
фи&&
| Захватное устройство | 1989 |
|
SU1708603A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
