t
Изобретение относится к станкостроению и может быть использовано для автоматизации загрузки-выгрузки деталей в металлорежущие станки, прессы и другое технологическое оборудование .
Известен автооператор, содержащий руку со охватом на ее конце, приводы вертикального и горизонтального перемещений руки, загрузочное устройство и перегружатель деталей на рабочую позицию 11 .
Однако известная конструкция имее ограниченные технологические возможности, так как она не позволяет захватывать неориентированные детали, и перенос деталей с позиции загрузки на перегружатель, а затем на позицию обработки производится одним захватом.
Цель изобретения - расширение технологических возможностей.
Указанная цель достигается тем, что на руке установлены дополнительные схваты, а на перегружателе равномерно расположены промежуточные позиции, количество которых на одну меньше, чем количество дополнительны схватов. Причем один из дополнительных схватов руки расположен за загрузочным устройством.
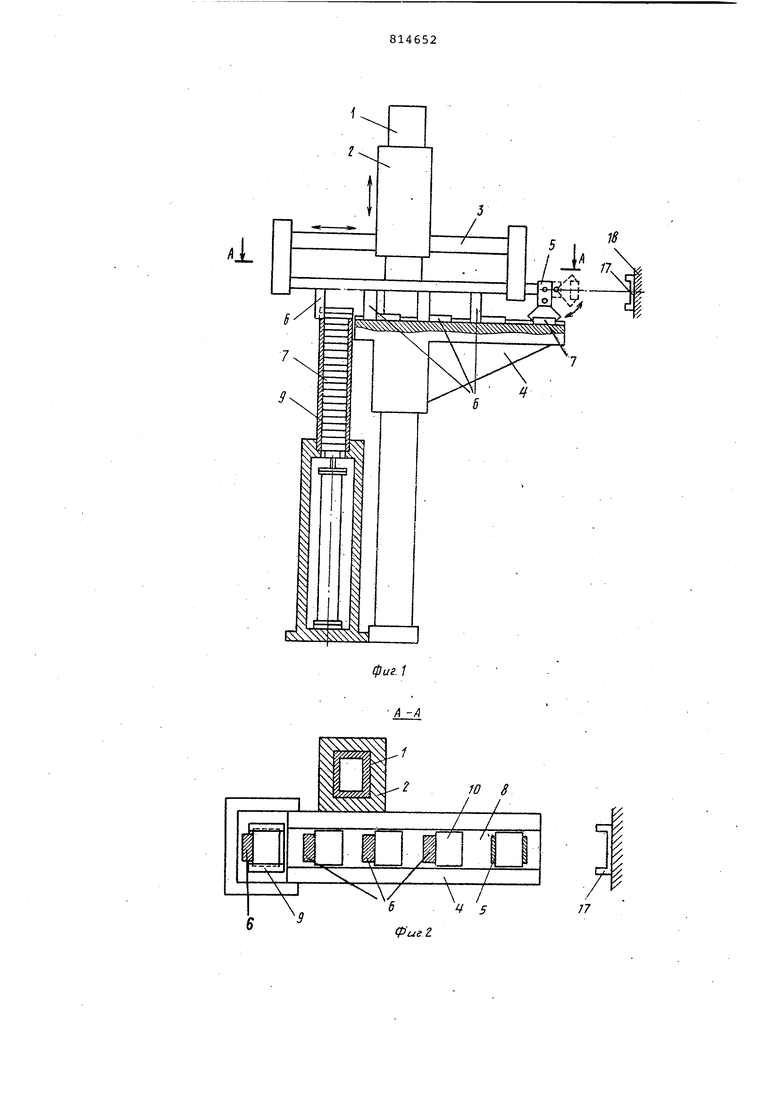
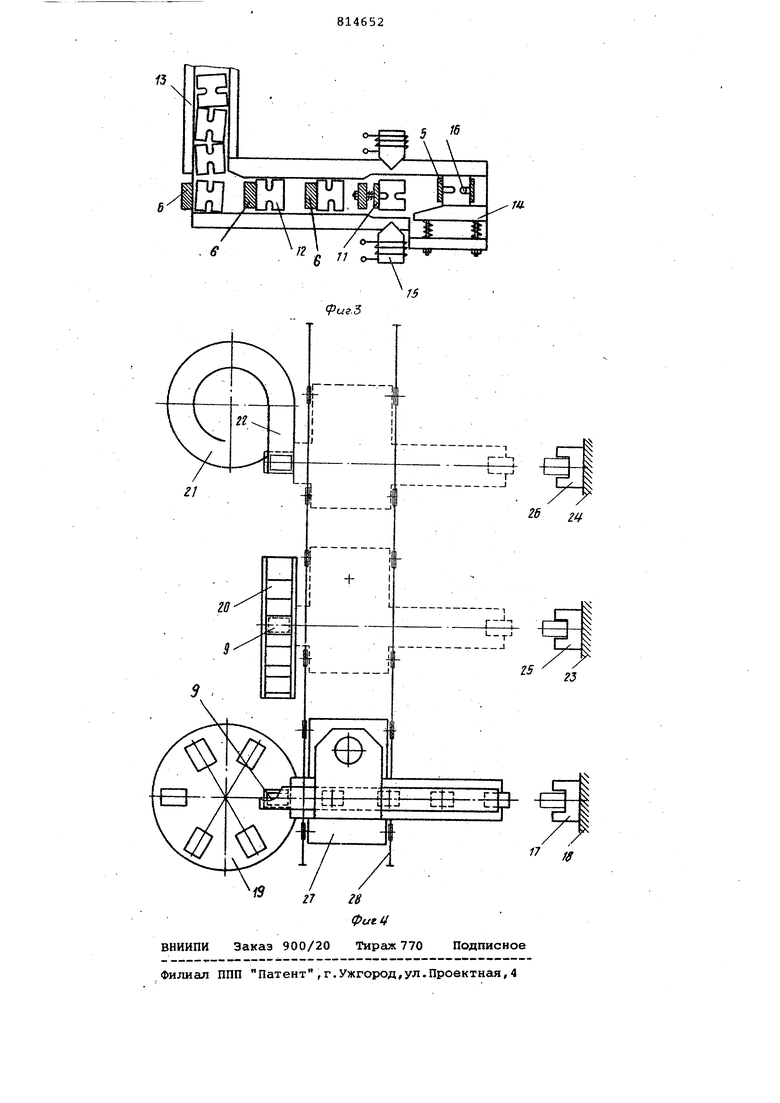
На фиг.1 изображен автооператор, общий вид; на фиг.2 - разрез А-А на фиг.1; нафиг.3 - пример выполнения канала на перегружателе с устройствами дополнительного ориентирования и базирования деталей) на фиг.4 пример установки автоопёратора в
0 технологическом комплексе с несколькими рабочими позициями.
Автооператор состоит из установленных на стойке 1 корпуса 2 с имеющей возможность перемещения вдоль горизонтальной оси механической рукой 3 и перегружателя 4 для перемещения деталей (фиг.1).
На 5уке 3 установлен схват 5 и дополнительные схваты 6, которые служат для перемещения детали 7 по каналу 8 в перегружателе 4. Канал 8 соединяет загрузочное устройство 9с операционной зоной схвата 5.
5 в канале 8 размещены промежуточ-. ные загрузочные позиции 10, а дополнительные схваты б на руке 3 автооператора размещены соответственно этим промежуточным загрузочным позиС циям.
Загрузочное устройство 9 выполнено в виде кассеты, а дополнительные схваты б представляют собой шиберные устройства или же они могут быть оснащены различными вспомогательными устройствами, например подпружиненными планками 11, служащими для операций вторичного ориентирования фигурных деталей 12, поступающих по лотку 13 в канал перегружателя с помощью подпружиненной планки 14, электромагнитного ориентатора 15 и базирующего штыря 16. Дополнительных схватов 6 на один меньше, чем отношение расстояния между позицией вьадачи детали из загрузочного устройства 9 и рабочей ячейкой 17 машины 18 к ходу руки 3, поскольку одна из позиций обслуживается схватом 5.
Промежуточных загрузочных позиций 10 в канале 8 перегружателя 4 на одну меньше, чем количество дополнительных схватовб, поскольку один из дополнительных схватов обслуживает загрузочное, устройство 9.
Автооператор г 5ожет быть использован в технологическом комплексе (фиг.4).
Технологический комплекс, включающий в себя автооператор, имеет ряд загрузочных устройств в виде, например, барабана 19 или магазина 20 с кассетами, или же бункерного устройства 21 с лотком 22, а рабочие машины 18,23 и 24 С ячейками 17,25 и 26. Автооператор смонтирован на тележке 27, которая служит для его перемещения по рельсам 28 между агрегатами технологического комплекса.
Автооператор работает следующим образом.
Корпус 2 автооператора с рукой 3 находится в верхнем положении. Рука 3 со схватом 5 и с дополнительными схватами 6, находясь В крайнем левом положений, совместно с корпусом 2 опускается в нижнее положение (фиг . 1 и 2) . В этом положении происходит, захват очередной детали 7.из кассеты ч загрузочного устройства 9 дополнительным схватом, находящимся за этим устройством, и захват детали, находящейся в операционной зоне, схватом 5.
Схват 5 поворачивается и вместе с зажатой деталью устанавливается в положение загрузки.
Рука 3 автооператора перемещается в крайнее правое положение, при этом дополнительный схват, расположенный за загрузочным устройством, извлекает деталь 7 из кассеты и подает ее на первую промежуточную позицию перегружателя 4, а остальные дополнительные схваты перемещают ранее извлеченные детали по каналу 8 перегружателя 4 на расстояние, равное ходу штока руки 3 к рабочей машине 18. Схват 5 устанавливает деталь в эту рабочую машину 18. Если деталь
5 12 подается по лотку 13 в неориентированном положении, то в канале перегружателя она предварительно ориентируется электромагнитным ориентатором 15, а затем проталкивается подпружиненной планкой 11 дополнительного схвата 6 в участок канала пе-- регружателя, имеющий подпружиненную планку 14. Здесь деталь базируется штырем 16.
5 Схват 5 .раскрывается, рука 3 поднимается и отводится в крайнее левое положение, затем схват 5 поворачивается в исходное положение.
Формула изобретения
1. Автооператор, содержащий руку со схватом на ее конце, приводы вертикального и горизонтального перемещений руки, загрузочное устройство
и перегружатель .деталей на рабочую позицию, отличающийся тем, что, с целью расширения технологических возможностей, на руке установлены дополнительные схвать, а на перегружателе равномерно расположены промежуточные позиции, количество которых на одну меньше, чем количество дополнительных схватов.
2. Автооператор по п.1, от л и чающийся тем, что один из дополнительных схватов руки расположен за загрузочным устройством. Источники информации.
: принятые во внимание при экспертизе
1. Авторское свидетельство СССР №506496, кл. В 25 J 11/00, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТРОЛЬНО-СОРТИРОВОЧНЫЙ КОМПЛЕКС | 1990 |
|
RU2023571C1 |
| Автоматизированный технологический комплекс | 1985 |
|
SU1349969A1 |
| Автомат для контроля деталей цилиндрической формы | 1986 |
|
SU1466815A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Промышленный робот | 1980 |
|
SU889418A1 |
| Автоматизированная линия для многопереходной листовой штамповки | 1988 |
|
SU1516198A1 |
| АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1991 |
|
RU2022752C1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| Устройство вторичной ориентации деталей типа колпачков | 1985 |
|
SU1291358A1 |