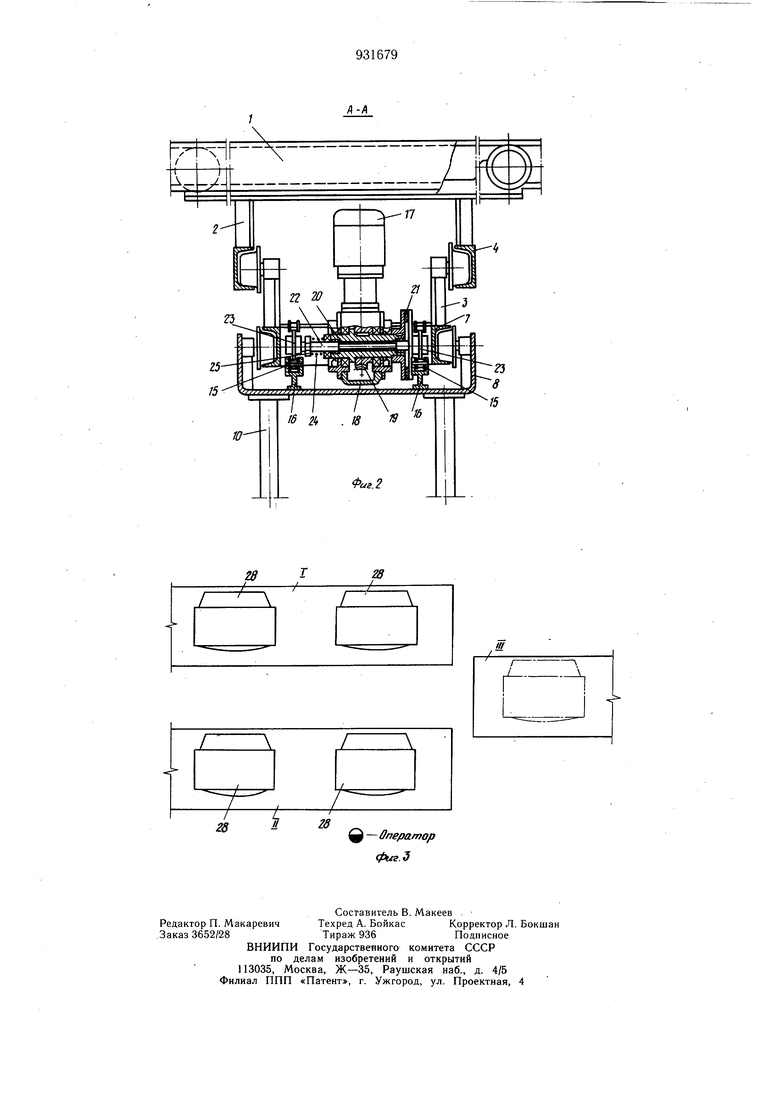
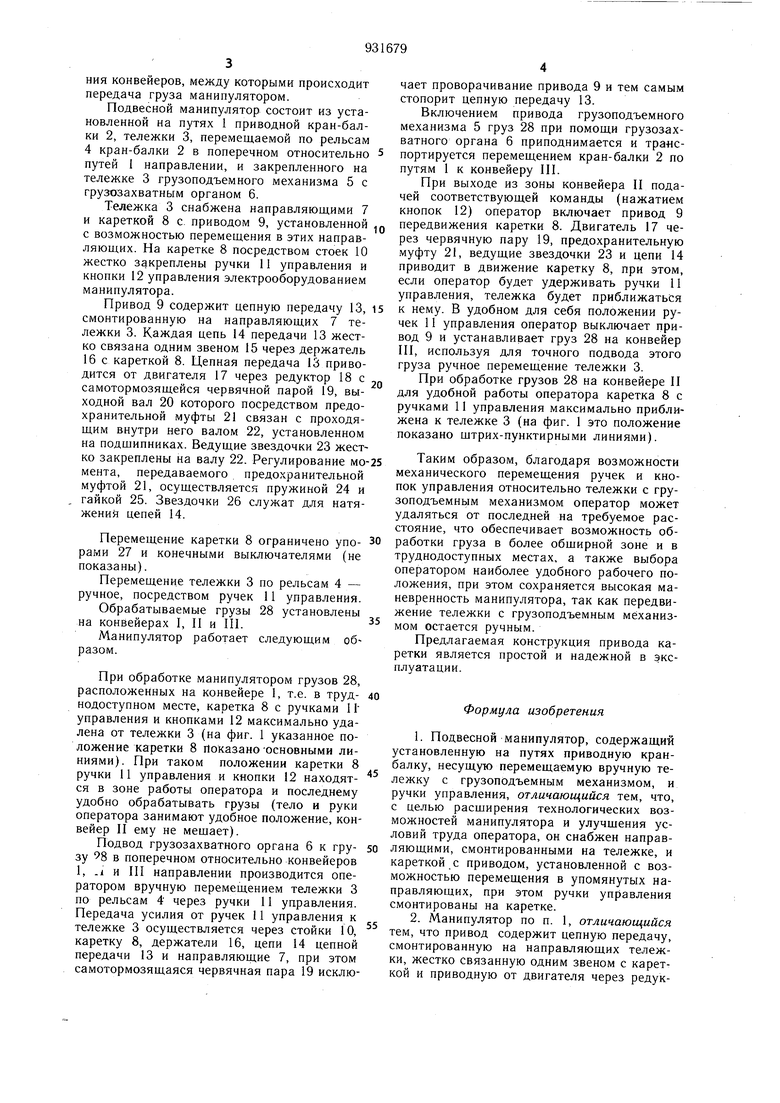
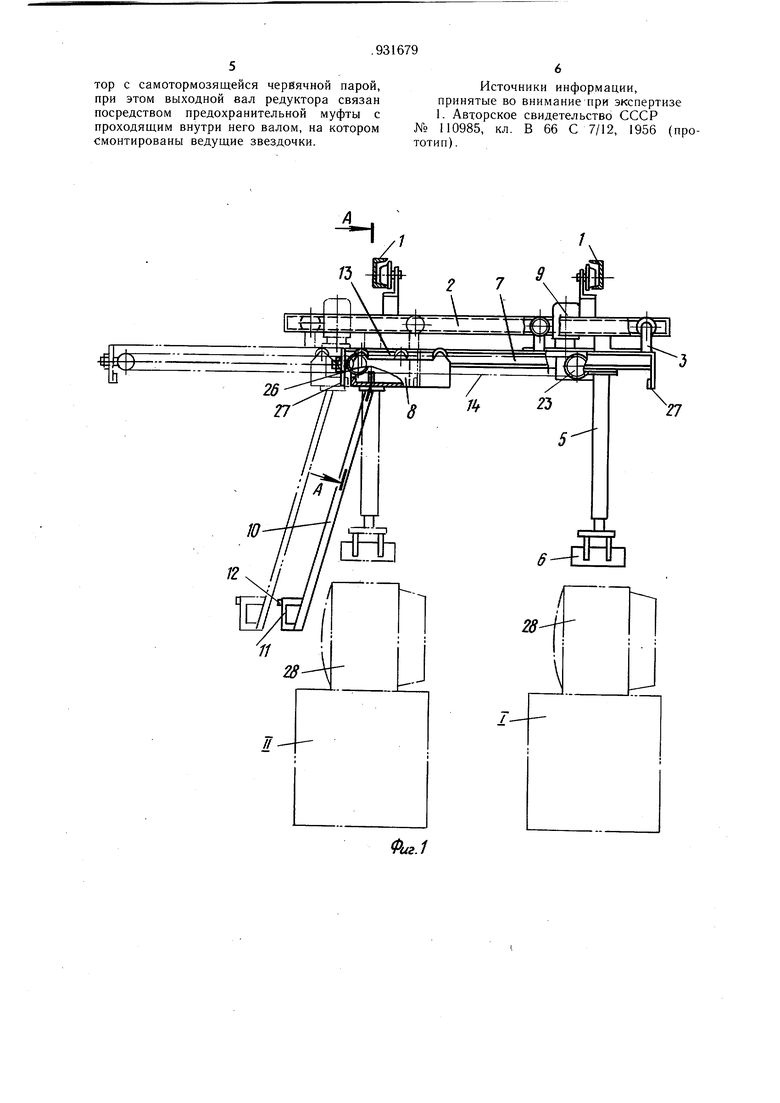
(54) ПОДВЕСНОЙ МАНИПУЛЯТОР Изобретение относится к грузоподъемной и транспортной технике и может найти широкое применение для механизации межконвейерной перегрузки грузов, складских и других погрузочно-разгрузочных работ. Известен подвесной манипулятор, содержащий установленную на путях приводную кран-балку, несущую перемещаемую вручную тележку с грузоподъемным механизмом и ручки управления, закрепленные на тележке. Для небольших грузов ручное перемещение тележки с грузоподъемным механизмом обеспечивает маневренность и простоту конструкции манипулятора 1. Однако этот манипулятор имеет ограниченные технологические возможности, так как ручки управления перемещаются вместе с тележкой, подводимой к грузу. Вместе с ручками должен перемещаться и оператор, а поэтому таким манипулятором можно обрабатывать лишь грузы, к которым оператор может приблизиться, удерживая ручки управления вытянутой рукой, при этом зачастую приходится «тянуться к грузу, принимая неудобное положение, что ухудшает условия труда оператора. Для грузов, к которым нельзя приблизиться на указанное расстояние, этот манипулятор неприменим. Цель изобретения - расщирение технологических возможностей манипулятора и улучшение условий труда оператора. Указанная цель достигается тем, что манипулятор снабжен направляющими, смонтированными на тележке, и кареткой с приводом, установленной с возможностью перемещения в упомянутых направляющих, при этом ручки управления смонтированы на каретке. Кроме того, привод каретки содержит цепнуй передачу, смонтированную на направляющих тележки, жестко связанную одним звеном с кареткой и приводную от двигателя через редуктор с самотормозящейся червячной парой, при этом выходной вал редуктора связан посредством предохранительной муфты с проходящим внутри него валом, на котором смонтированы ведущие звездочки. На . 1 изображен манипулятор, общий вид, на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - возможный вариант расположения конвейеров, между которыми происходит передача груза манипулятором. Подвесной манипулятор состоит из установленной на путях 1 приводной кран-балки 2, тележки 3, перемещаемой по рельсам 4 кран-балки 2 в поперечном относительно путей 1 направлении, и закрепленного на тележке 3 грузоподъемного механизма 5 с грузозахватным органом 6. Тележка 3 снабжена направляющими 7 и кареткой 8 с приводом 9, установленной с возможностью перемещения в этих направляющих. На каретке 8 посредством стоек 10 жестко закреплены ручки 11 управления и кнопки 12 управления электрооборудованием манипулятора. Привод 9 содержит цепную передачу 13, смонтированную на направляющих 7 тележки 3. Каждая цепь 14 передачи 13 жестко связана одним звеном 15 через держатель 16 с кареткой 8. Цепная передача 13 приводится от двигателя 17 через редуктор 18 с самотормозящейся червячной парой 19, выходной вал 20 которого посредством предохранительной муфты 21 связан с проходящим внутри него валом 22, установленном на подшипниках. Ведущие звездочки 23 жестко закреплены на валу 22. Регулирование момента, передаваемого предохранительной муфтой 21, осуществляется пружиной 24 и гайкой 25. Звездочки 26 служат для натяжения цепей 14. Перемещение каретки 8 ограничено упорами 27 и конечными выключателями (не показаны). Перемещение тележки 3 по рельсам 4 - ручное, посредством ручек 11 управления. Обрабатываемые грузы 28 установлены на конвейерах I, II и III. Манипулятор работает следующим образом. При обработке манипулятором грузов 28, расположенных на конвейере 1, т.е. в труднодоступном месте, каретка 8 с ручками 11 управления и кнопками 12 максимально удалена от тележки 3 (на фиг. 1 указанное положение каретки 8 Показано -основными линиями). При таком положении каретки 8 ручки 11 управления и кнопки 12 находятся в зоне работы оператора и последнему удобно обрабатывать грузы (тело и руки оператора занимают удобное положение, конвейер II ему не мещает). Подвод грузозахватного органа 6 к груЗУ 8 в поперечном относительно конвейеров 1, .1 и III направлении производится оператором вручную перемещением тележки 3 по рельсам 4 через ручки 11 управления. Передача усилия от ручек 11 управления к тележке 3 осуществляется через стойки 10, каретку 8, держатели 16, цепи 14 цепной передачи 13 и направляющие 7, при этом самотормозящаяся червячная пара 19 исключает проворачивание привода 9 и тем самым стопорит цепную передачу 13. Включением привода грузоподъемного механизма 5 груз 28 при помощи грузозахватного органа 6 приподнимается и тра«спортируется перемещением кран-балки 2 по путям 1 к конвейеру III. При выходе из зоны конвейера II подачей соответствующей команды (нажатием кнопок 12) оператор включает привод 9 передвижения каретки 8. Двигатель 17 через червячную пару 19, предохранительную муфту 21, ведущие звездочки 23 и цепи 14 приводит в движение каретку 8, при этом, если оператор будет удерживать ручки 11 управления, тележка будет приближаться к нему. В удобном для себя положении ручек 11 управления оператор выключает привод 9 и устанавливает груз 28 на конвейер III, используя для точного подвода этого груза ручное перемещение тележки 3. При обработке грузов 28 на конвейере II для удобной работы оператора каретка 8 с ручками 11 управления максимально приближена к тележке 3 (на фиг. 1 это положение показано щтрих-пунктирными линиями). Таким образом, благодаря возможности механического перемещения ручек и кнопок управления относительно тележки с грузоподъемньш механизмом оператор может удаляться от последней на требуемое расстояние, что обеспечивает возможность обработки груза в более обширной зоне и в труднодоступных местах, а также выбора оператором наиболее удобного рабочего положения, при этом сохраняется высокая маневренность манипулятора, так как передвижение тележки с грузоподъемным механизмом остается ручным. Предлагаемая конструкция привода каретки является простой и надежной в эксплуатации. Формула изобретения 1.Подвесной манипулятор, содержащий установленную на путях приводную кранбалку, несущую перемещаемую вручную тележку с грузоподъемным механизмом, и ручки управления, отличающийся тем, что, с целью расширения технологических возможностей манипулятора и улучщения условий труда оператора, он снабжен направляющими, смонтированными на тележке, и кареткой с приводом, установленной с возможностью перемещения в упомянутых направляющих, при этом ручки управления смонтированы на каретке. 2.Манипулятор по п. 1, отличающийся тем, что привод содержит цепную передачу, смонтированную на направляющих тележки, жестко связанную одним звеном с кареткой и приводную от двигателя через редуктор с самотормозящейся червячной парой, при этом выходной вал редуктора связан посредством предохранительной муфты с проходящим внутри него валом, на котором смонтированы ведущие звездочки.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 110985, кл. В 66 С 7/12, 1956 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1979 |
|
SU814722A2 |
| Установка для сборки резинотехнических изделий | 1980 |
|
SU971666A1 |
| Манипулятор | 1980 |
|
SU908589A1 |
| Установка для сборки резинотехнических изделий | 1984 |
|
SU1148797A2 |
| Устройство для поворота грузовых подвесок конвейера | 1983 |
|
SU1155535A1 |
| Конвейер для акклиматизации бумаги | 1960 |
|
SU140731A1 |
| Манипулятор | 1978 |
|
SU779065A1 |
| Манипулятор | 1978 |
|
SU679385A1 |
| РОБОТ-МАНИПУЛЯТОР ДЛЯ ПОКРАСКИ ИЗДЕЛИЙ | 2003 |
|
RU2263020C2 |
| СТАНОК ДЛЯ ШЛИФОВАНИЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ДЛИННОМЕРНОЙ ТРУБЫ | 1969 |
|
SU234179A1 |