(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГИДРОПРЕССОМ ДЛЯ ГИБКИ С РАСТЯЖЕНИЕМ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления гидрав-личЕСКиМ пРЕССОМ | 1979 |
|
SU821207A1 |
| Устройство для управления гидравлическим прессом | 1977 |
|
SU703363A1 |
| Система управления гидравлическим прессом для гибки с растяжением | 1980 |
|
SU863425A1 |
| Система управления гидравлическим прессом для гибки с растяжением | 1980 |
|
SU893583A1 |
| Обтяжной пресс | 1975 |
|
SU841999A1 |
| Пресс для гибки заготовок с растяжением | 1982 |
|
SU1107927A1 |
| Пресс для гибки с растяжением | 1978 |
|
SU795625A1 |
| ГИДРОПУЛЬСАЦИОННЫЙ ПРЕСС | 1992 |
|
RU2050220C1 |
| Станок для гибки с растяжением профилей | 1990 |
|
SU1779433A1 |
| Станок для гибки профилей с растяжением | 1982 |
|
SU1148669A1 |
1
Изобретение относится к обработке металлов цавлением и может быть использовано цля произвоцства петалей из профилей гибкой с растяжением на прессах типа ПГР.
Известно устройство, соцержашее регулятор цавления с основным и дополнительным поршнями, межцу которыми расположена воздушная полость, смонтированные на станине пресса пневмоцилинары полости которых соединены с регулятором цавления, а штоки связаны с гибочными рычагами пресса, при этом штоки пневмоцилиноров и дополни тельного поршня регулятора давления соединены с крышками своих цилиндров посредством винтового соединения fi;i.
Недостатком известного устройства является то, что оно не позволяет увеличить скорость гибки с расТ51женнём.
Цель изобретения - увеличение скорости гибки.
Поставленная цель достигается тем, что устройство снабжено установленными
на гибочных рычагах дополнительными пневмоцилиндрами, штоки которых выполнены в виде винтов и жестко связаны с растяжными гидрсадипиндрами, а подпоршневые полости - с воздушной полостью регулятора давления.
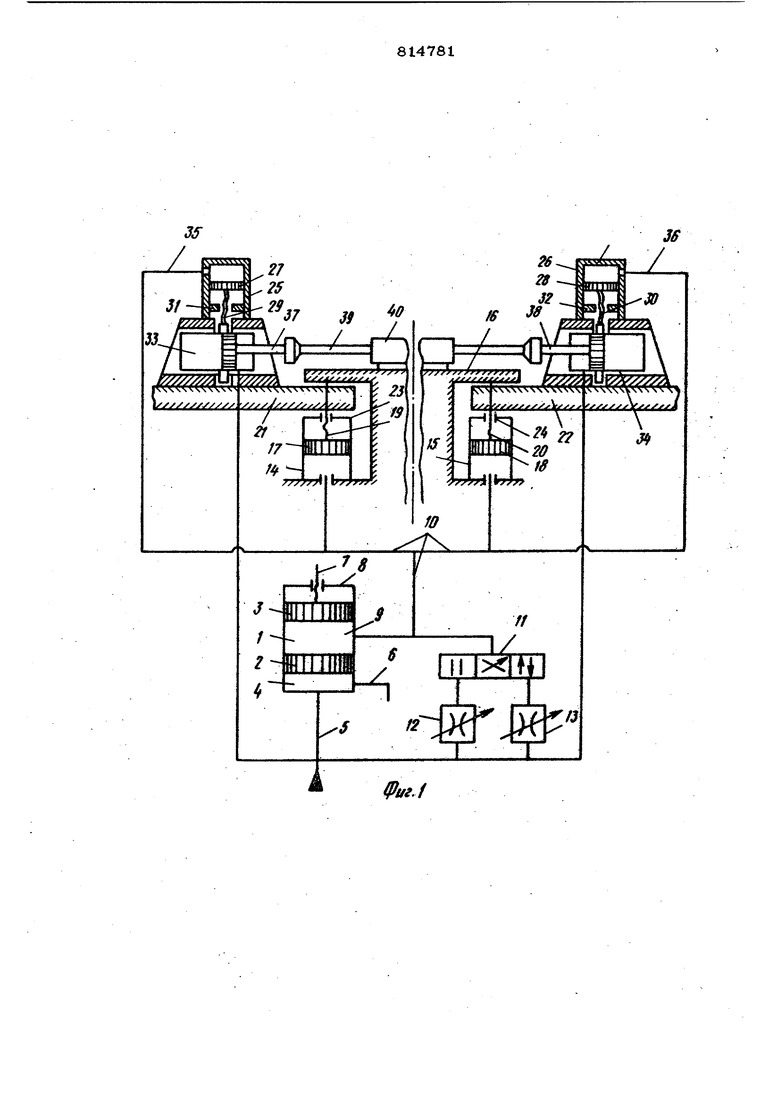
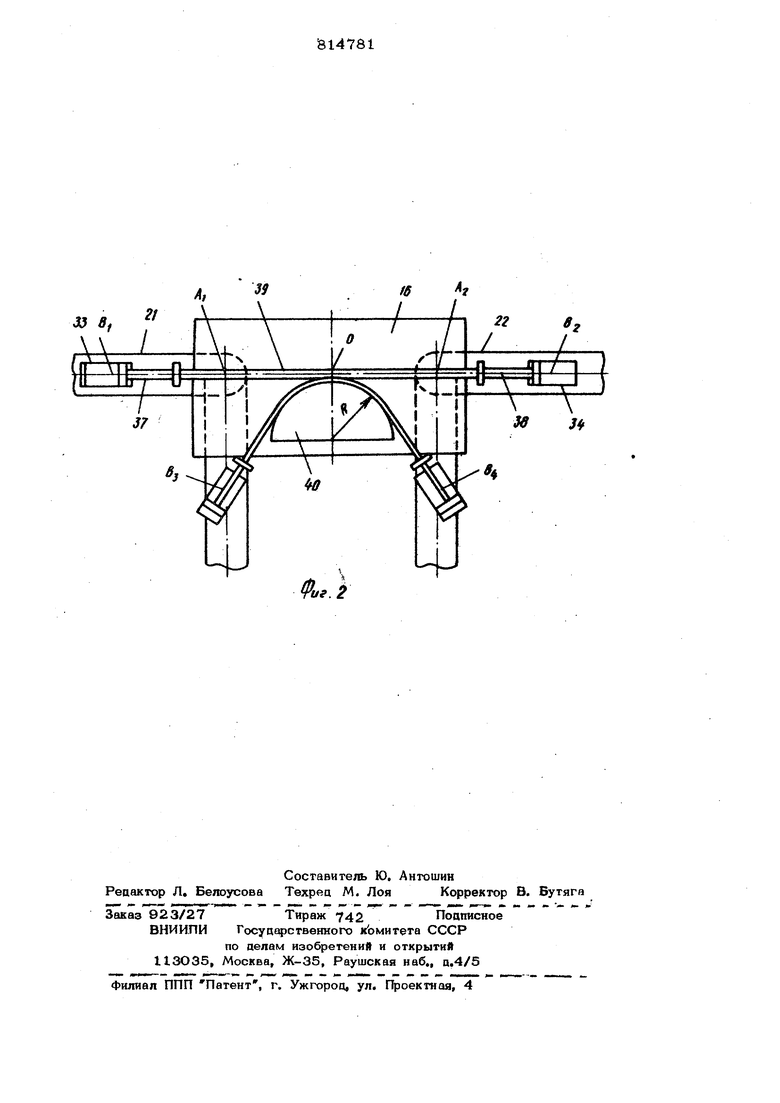
На фиг. I изображена схема устройства; на фиг. 2 - схема перемещений обрабатываемой петали и узлов пресса при гибке с растяжением.
Устройство состоит из регулятора давления, в который входит гидроцилтгадр I с основным 2 и дополнительным 3 поршнями. Полость 4 имеет магистраль для подвода 5 и слива 6 жидкости. Дополнительный поршень 3 соединен с винтовым штоком 7, а последний с крышкой 8. Управляющая полость 9 регулятора давления с помощью трубопровода 10 соединена с золотником II, а последний с дросселями 12 и 13 и б пневмоцилингреми 14 и 15, жестко закрепленными на станине пресса 16. Пневмоцилиндры имеют поршни 17 н 18, соединенные с винтовыми штоками 19 и 2О, котчзрые взаимосвязаны с гибочными рычагами 21. и 22, а с крышками пневмоцилинсфов 23 и 24 образуют винтовые пары 19,23, и 20,24. Дополнительно пневмоцилиноры 25 и 26 с порш нями 27 и 28, штоками 29 и ЗО и с крышками 31 и 32 установлены на гибочных рычагах 21 и 22. Штоки 29 и qO образующие с крышками 31 и 32 винтовые пары 29,31 и ЗО,32, соединены с цилиндрами растяжения 33. н 34. Рабочие полости пневмоцилиндров 25 и 26 соединены с регулятором давления 1 трубопроводами 35 и 36. К штокам 37 и 38 цилиндров растяжения 33 и 34 закреплена изгибаемая деталь 39 по пуансону 4О, установленному на станине тфесса 16. Работа устройства осуществялется следующим образом. В полость 9 регулятора давления подают воздух, повышая тем самым давлени жидкости в рабочей магистрали через отверстие 5 до тех пор, пока не будет растянута деталь 39 на заданную величину. Затем деталь 39 изгибают по пуансону 4О, вращая гибочные рычаги 21 и 22, которые вращая винтовые штоки. 19 и 2О перемещают вниз поршни 17 и 18. Этчэ приводит к повышению давления в полости 9 и 4 регулятора давления. При гибке .дополнительные пневмо- . цилиндры 25 и 26 также впкяют на величину давления воздуха в полости 9 регулятора давления. Точки В и Bg (фиг. поворота цилиндров растяжения в плоскости гибки) переместились в точки Bj и В соответственно. При этом вращение гибочных рычагов 21 и 22 осуществляют относительно точек А и . Очевидно, что ОБ, ОА + ОВ OAgf AjjB2 OBjr. .Поэтому,чтобы обеспе шть равенство и ОВ ОВ штоки 37 н 36 аи ЛИН ФОБ растяжения 33 и 34 должны быстро перемещаться внутрь цилинсфов. Растяжные цилиндры (фиг. 2) 33 и 34 при гибке детали 39 совершают поворот относительно гибочных рычагов 21 и 22, вращая тем самым штоки 29 и 30 и перемещая поршни27 и 28 цо-. полнительных пневмоцилинцров 25 и 26, что привоаит (для аанной аетали) к дополнительному повышению давления возпуха в полости 9 и рабочей жидкости в магистрали через-отверстие 5. Для изгибаемой детали 39 по пуансону ...„ „j.., 4О, у которого (не показано) при гибке 37 и 38 совершают перемещения в цилиндрах растяжения 33 и 34 вобрат-ном направлении, по сравнению с показанным на фиг. 2. При этом цилиндры растяжения 33 и 34 совершают поворот относительно гибочных рычагов 21 и 22 также в о атном направлении, приводя, в конечном счете, к понижению давления воздуха в полости 9 регулятора давления и рабочей жидкости в магистрали 5. Предлагаемое устройство для управлеНИН гидравлическим прессом типа ПГР обеспевдвает увеличение скорости гибки с с растяжением и повышение производительности оборудования. Формула изобретения Устройство для упревления гидропрессом для гибки с растяжением, исполнительные органы которотчэ выполнены в виде поворотных гибочных рычагов, несз/ших растяжные гидроцилиндры, содержащее пневмоцилиндры, рабочая которых соединена с воздушной полостью регулятора давления, а шток связан с гибочными рычагами пресса.,р тличающееся тем, что,с целью повышения скорости гибки, оно снабжено установленными на гибочных рычагах дополнительными пневмоцилиндрами, штоки которьрс выполнены в виде винтов и жестко связаны с растяжными гидроцилинорами, а подпоршневые полости - с воздушной полостью регулятора давления. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР N 634872, кл. В ЗО В 15/22, 07.08.79. -ЩШП
(Рог.1 1И1Х1Н1 .f
Фиг. 2
