(54) ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ
МЕХАНИЗМАМИ ПЕРЕМЕЩЕНИЯ ТЕЛЕЖКИ И ПОВОРОТА
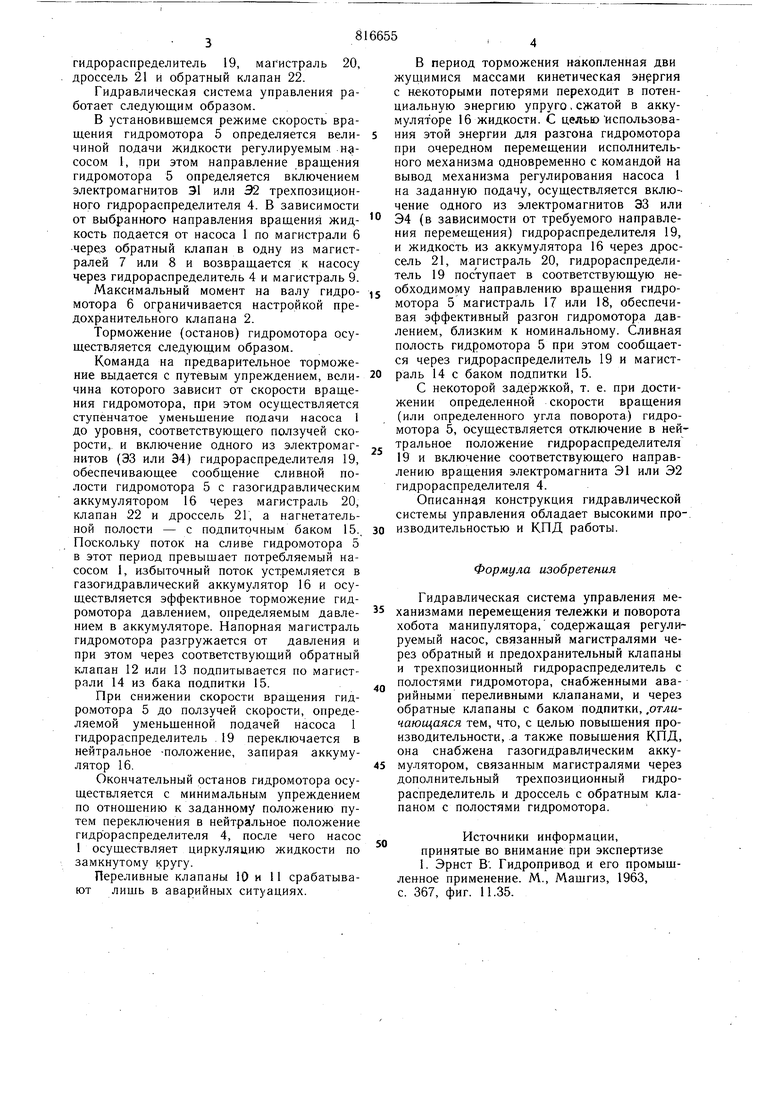
ХОБОТА МАНИПУЛЯТОРА гидрораспределитель 19, магистраль 20, дроссель 21 и обратный клапан 22. Гидравлическая система управления работает следующим образом. В установившемся режиме скорость вращения гидромотора 5 определяется величиной подачи жидкости регулируемым нзсосом 1, при этом направление вращения гидромотора 5 определяется включением электромагнитов 31 или Э2 трехпозиционного ги/1рораспределителя 4. В зависимости от выбранного направления вращения жидкость подается от насоса 1 по магистрали 6 через обратный клапан в одну из магистралей 7 или 8 и возвращается к насосу через гидрораспределитель 4 и магистраль 9. Максимальный момент на валу гидромотора 6 ограничивается настройкой предохранительного клапана 2. Торможение (останов) гидромотора осуществляется следующим образом. Команда на предварительное торможение выдается с путевым упреждением, величина которого зависит от скорости вращения гидромотора, при этом осуществляется ступенчатое уменьшение подачи насоса 1 до уровня, соответствующего ползучей скорости, и включение одного из электромагнитов (ЭЗ или 34) гидрораспределителя 19, обеспечивающее сообщение сливной полости гидромотора 5 с газогидравлическим аккумулятором 16 через магистраль 20, клапан 22 и дроссель 21, а нагнетательной полости - с подпиточным баком 15., Поскольку поток на сливе гидромотора 5 в этот период превышает потребляемый насосом 1, избыточный поток устремляется в газогидравлический аккумулятор 16 и осуществляется эффективное торможе 1ие гидромотора давлением, определяемым давлением в аккумуляторе. Напорная магистраль гидромотора разгружается от давления и при этом через соответствующий обратный клапан 12 или 13 подпитывается по магистрали 14 из бака подпитки 15. При снижении скорости вращения гидромотора 5 до ползучей скорости, определяемой уменьщенной подачей насоса 1 гидрораспределитель . 19 переключается в нейтральное -положение, запирая аккумулятор 16. Окончательный останов гидромотора осуществляется с минимальным упреждением по отношению к заданному положению путем переключения в нейтральное положение гидрораспределителя 4, после чего насос 1 осуществляет циркуляцию жидкости по замкнутому кругу. Переливные клапаны 10 и 11 срабатывают лишь в аварийных ситуациях. В период торможения накопленная дви жущимися массами кинетическая энергия с некоторыми потерями переходит в потенциальную энергию упруго, сжатой в аккумуляторе 16 жидкости. С цельюиспользования этой энергии для разгона гидромотора при очередном перемещении исполнительного механизма одновременно с командой на вывод механизма регулирования насоса 1 на заданную подачу, осуществляется включение одного из электромагнитов ЭЗ или Э4 (в зависимости от требуемого направления перемещения) гидрораспределителя 19, и жидкость из аккумулятора 16 через дроссель 21, магистраль 20, гидрораспределитель 19 поступает в соответствующую необходимому направлению вращения гидромотора 5 магистраль 17 или 18, обеспечивая эффективный разгон гидромотора давлением, близким к номинальному. Сливная полость гидромотора 5 при этом сообщается через гидрораспределитель 19 и магистраль 14 с баком подпитки 15. С некоторой задержкой, т. е. при достижении определенной скорости вращения (или определенного угла поворота) гидромотора 5, осуществляется отключение в нейтральное положение гидрораспределителя 19 и включение соответствующего направлению вращения электромагнита Э1 или Э2 гидрораспределителя 4. Описанная конструкция гидравлической системы управления обладает высокими производительностью и КПД работы. Формула изобретения Гидравлическая система управления механизмами перемещения тележки и поворота хобота манипулятора, содержащая регулируемый насос, связанный магистралями через обратный и предохранительный клапаны и трехпозйционный гидрораспределитель с полостями гидромотора, снабженными аварийными переливными клапанами, и через обратные клапаны с баком подпитки, .отличающаяся тем, что, с целью повышения производительности, а также повыщения КПД, она снабжена газогидравлическим аккумулятором, связанным магистралями через дополнительный трехпозйционный гидрораспределитель и дроссель с обратным клапаном с полостями гидромотора. Источники информации, принятые во внимание при экспертизе 1. Эрнст В; Гидропривод и его промышленное применение. М., Машгиз, 1963, с. 367, фиг. 11.35.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая система управления механизмами перемещения тележки поворота хобота манипулятора | 1984 |
|
SU1155345A2 |
| ГИДРОПРИВОД | 1991 |
|
RU2011077C1 |
| ГИДРООБЪЕМНЫЙ ПРИВОД ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА, СИСТЕМА АВТОМАТИЧЕСКОЙ СМЕНЫ РАБОЧЕЙ ЖИДКОСТИ ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА, НАСОСНЫЙ АГРЕГАТ ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА, СИСТЕМА КОНДИЦИОНИРОВАНИЯ И РЕВЕРСА ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА И ГИДРОМОТОРНЫЙ АГРЕГАТ ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2108507C1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1982 |
|
SU1053949A1 |
| Система управления гидравлическим прессом | 1983 |
|
SU1098831A1 |
| ГИДРОСИСТЕМА МОБИЛЬНОЙ МАШИНЫ | 2010 |
|
RU2435909C1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1976 |
|
SU1038051A1 |
| Гидравлический пресс | 1984 |
|
SU1220806A1 |
| Насосно-аккумуляторный гидравлический привод поворота платформы землеройной машины | 1981 |
|
SU1010224A2 |
| Гидропривод | 1989 |
|
SU1714259A1 |

