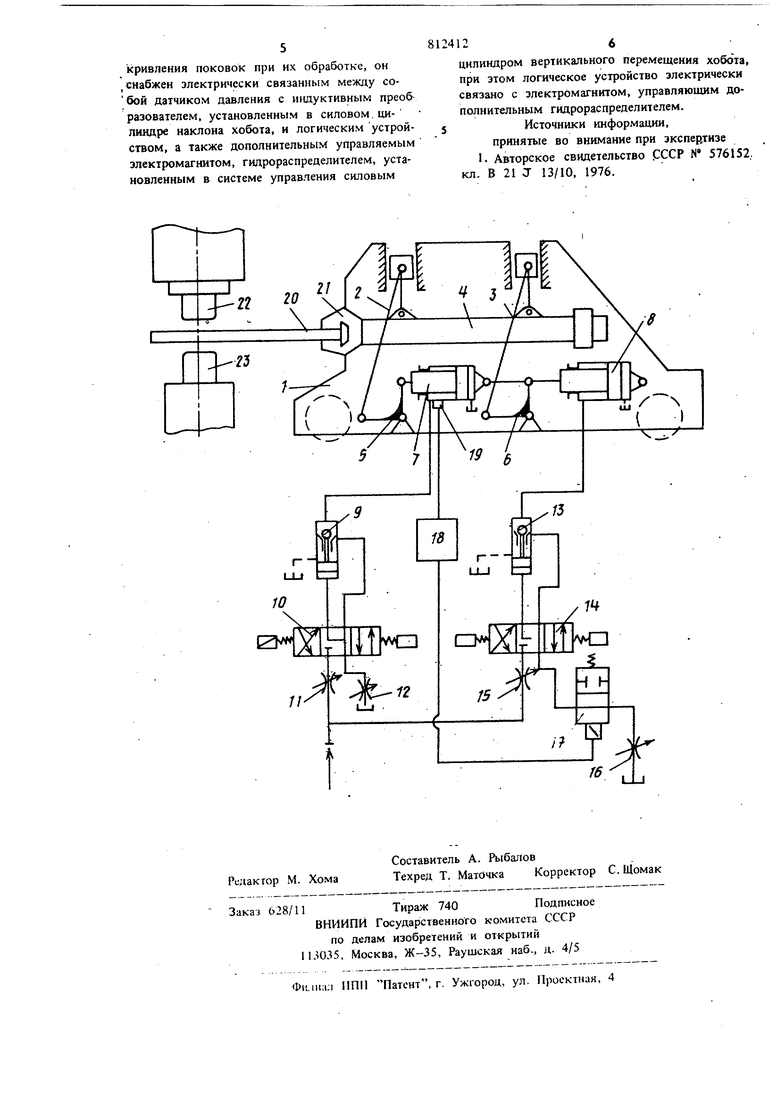
Изобретение относится к вспомогательному оборудованию кузнечно-прессовых цехов, а именно к конструкциям манипуляторов. Известен манипулятор, содержащий тележку со смонтированным на ней посредством передней и задней рычажных подвесок с двуплечими рычагами хоботом, силовой цилиндр накло на хобота, шток которого шарнирно соединен с двуплечим рычагом передней рычажной подвески, силовой цилиндр вертикального перемещения хобота, шток которого шарнирно соединен с двуплечим рычагом задней рычажной подвески и с корпусом силового цилиндра наклона хобота, при этом силовые цилиндры наклона и вертикального перемещения хобота снабжены индивидуальными системами управления, каждая из которых содержит связанные магистралями обратный управляемый клапан, гидрораспределитель и дроссель 1 . Недостатком данного манипулятора является то, что при ковке длинных поковок не исключается возможность их искривления под действием сил инерции массы хобота, которьие замедляют разгрузку передней подвески и задерживают срабатывание силового цилиндра наклона хобота. Цель изобретения - повышение качества полу чаемых поковок. С этой целью Манипулятор, содержащий тележку со смонтированным на ней. посредством передней и задней рычажных подвесок с двуплечим рычагами хоботом, силовой цилиндр наклона хобота, шток которого шарнирно соединен с двуплечим рычагом передней рычажной подвески, силовой цилиндр вертикального перемещения хобота, шток которого шарнирно соединен с двуплечим рычагом задней рычажной подвески и с корпусом силового цилиндра наклона хобота, при этом силовые цилиндры наклона н вертикального перемещения хобота снабжены индивидуальными системами управления, каждая из которых содержит связанные магистрали обратный управляемый клапан, гидрораспределитель и дроссель, снабжен электрически связанными между собой датчиком давления с индуктивным преобразователем, установленным в силовом цилшщре наклона хобота, и логическим устройством, а также дополнительным управляемым электромагнитом, гидрораспределителем, установленным в системе управления сшювым цилиндром вертикального перемещения хобота, при этом логическое устройство электрически связано с электромагнитом, управляющим дополнительным гидрораспределителем. На чертеже изображена схема манипулятора, Манипулятор содержит тележку 1, на которой с помощью рычажных подвесок 2 и 3 укреплен хобот 4. Подвески соединены с двупле чими рычагами 5 и 6, верхние шарниры которых связаны соответственно со штоком и кор пусом силового цилиндра 7 наклона хобота. Верхний щарнир двуплечего рычага 6 дополнительно связан со штоком силового цилиндра 8 вертикального перемещения хобота, корпус которого шарнирно закреплен в тележке 1. Силовой цилиндр 7 связан с напорной магистралью насосно -аккумуляторной станции и слив ной магистралью через управляемый обратный клапан 9, распределитель 10 и регулируемые дроссели 11 и 2. Аналогично с помощьюуправляемого обратного клапана 13, распределителя 14 и регулируемых дросселей 15 и 16 соединен с напорной и сливной магистралями силовой цилиндр 8 вертикального перемещения однако дополнительно на сливной магистрали между гидрораспределителем 14 и дросселем 16 встроен дополнительный гидрораспределитель 17, электромагнит которого связан с логическим устройством 18, соединенным с индуктивным преооразователем датчика 19 давления в силовом цилиндре 7. Индуктивный преобразователь датчика давления предназначен для выработки сигнала лри изменении да ления в силово.м цилиндре 7. Манипулятор работает следую1цим образом. Подлежащая обработке поковка 20 зажата в клещах 21 хобота 4. Ее деформирование осуществляется верхним 22 и нижним 23 бой ками пресса. Если между поковкой 20 и нижним бойком 23 пресса существует зазор, передняя подвеск 2 хобота нагружена, что обусловливает постоянное давление в запертой обратным клапаном 9 полости силового цилиндра 7 наклона и открытие дополнительного га 1рораспределителя 17, так как индуктивный преобразователь дат чика 19 давления не вырабатывает сигнал и логическое устройство 18 не включает электромагнит дополнительного гидрораспределител 17. Смещение гидрораспределителя 14 влево приводит к открыванию управляемого обрат.лого клапана 13 и опусканию хобота под дей ствием веса со .скоростью, определяемой величиной открывания щели на дросселе 16. При этом логическое, устройство не включает электромагнит дополнительного гидрораспределителя 14. 4 При соприкосновении поковки с нижним бойком пресса давление в силовом цилиндре начинает падать и сигнал от индуктивного преобразователя поступает в логическое устройство, которое мгновенно включает электромагнит дополнительного гидрораспределителя, благодаря чему магистраль слива жидкости из полости силового цилиндра 8 перекрывается и опускание хобота прекращается, несмотря на то, что передняя подвеска хобота не разгружена и гидрораспределитель 14-остается в левом положении. Благодаря этому поковка не искривляется при укладке на боек. Логическое устройство 18 выдерживает включенным электромагнит дополнительного гидрораспределителя 17 до тех пор, пока давление в силовом цилиндре 7 не начинает возрастать. Это произойдет при подаче жидкости высокого давления в силовой цилиндр 7 или в результате деформирования поковки бойками пресса. При деформировании поковки бойками пресса давление жидкости в силовом цилиндре 7 начнет возрастать и сигнал другого знака от индуктивного преобразователя датчика давления 19 поступит в логическое устройство 18, которое отключит электромагнит дополнительного гидрораспределителя 17. Силовой цилиндр 8 соединится со сливом, что приведет к опусканию хобота и частичной разгрузке подвесок, так как при уменьшении давления в силовом цилиндре 7 логическое устройство включит гидрораспределитель 14, который перекроет магистраль силового цилиндра 8 со сливом. Данный .манипулятор позволяет повысить качество получае.мых поковок. , Формула изобретения Манипулятор, содержащий тележку со смонтированным на ней посредством передней и задней рычажных подвесок с двуплечими рь(ча1ами хоботом, силовой цилиндр наклона хобота, шток которого щарнирно соединен с двуплечим рычагом передней рычажной подвески, силовой цилиндр вертикального перемещения хобота, щток которого шарнирно соединен с двуплечим рычагом задней рычажной подвески и с корпусом силового цилиндра наклона хобота, при этом силобые цилиндры наклона и вертикального перемещения хобота снабжены индивидуальными системами управления, каждая из которых содержит связанные магистралями обратный управляемый клапан, гидрораспределитель и дроссель, о тл и ч а К) щ и и с я тем, что,с целью noiibiujciiHH качества получаемых поковок за счсг ооеспсчения возможности устра 1ения И( 

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической укладки поковки на боек | 1976 |
|
SU576152A1 |
| Ковочный манипулятор | 1983 |
|
SU1082542A1 |
| Устройство вертикальной амортизации хобота манипулятора | 1976 |
|
SU607634A1 |
| Хобот ковочного манипулятора | 1977 |
|
SU725773A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1976 |
|
SU1038051A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1982 |
|
SU1053949A1 |
| Механизм изменения высоты подъема хобота ковочного манипулятора | 1981 |
|
SU979012A1 |
| Передняя подвеска хобота ковочногоМАНипуляТОРА | 1979 |
|
SU816656A1 |
| Привод продольного перемещения хобота ковочного манипулятора | 1981 |
|
SU997945A1 |
| Привод продольного перемещения тележки и хобота ковочного манипулятора | 1980 |
|
SU946775A1 |
