Изобретение относится к станкостроению, в частности к манипуляторам с ручным управлением, к грузоподъемным устройствам и т. д.
Известны манипуляторы, содержащие колонну, поворотную грузовую стрелу, выполненную в виде шарнирно-рычажного многозвенника, привод подъема и опускания грузовой стрелы и кисть со схватом и с устройством управления, установленную на конце грузовой стрелы 1.
Недостатком известного манипулятора является невозможность полной ориентации грузов во время их переноса, вследствие чего при работе появляется необходимость в дополнительных манипуляциях грузом, ведущих к снижению производительности труда.
Целью изобретения является повыщение производительности труда.
Указанная цель достигается тем, что манипулятор снабжен блоком ориентации схвата, содержащим дополнительные приводы поворота схвата относительно двух взаимно перпендикулярных осей, тумблеры и дополнительное устройство управления, имеющее основание, на котором расположены подпружиненные рукоятки, кинематически связанные с соответствующими дополнительными приводами и с тумблерами.
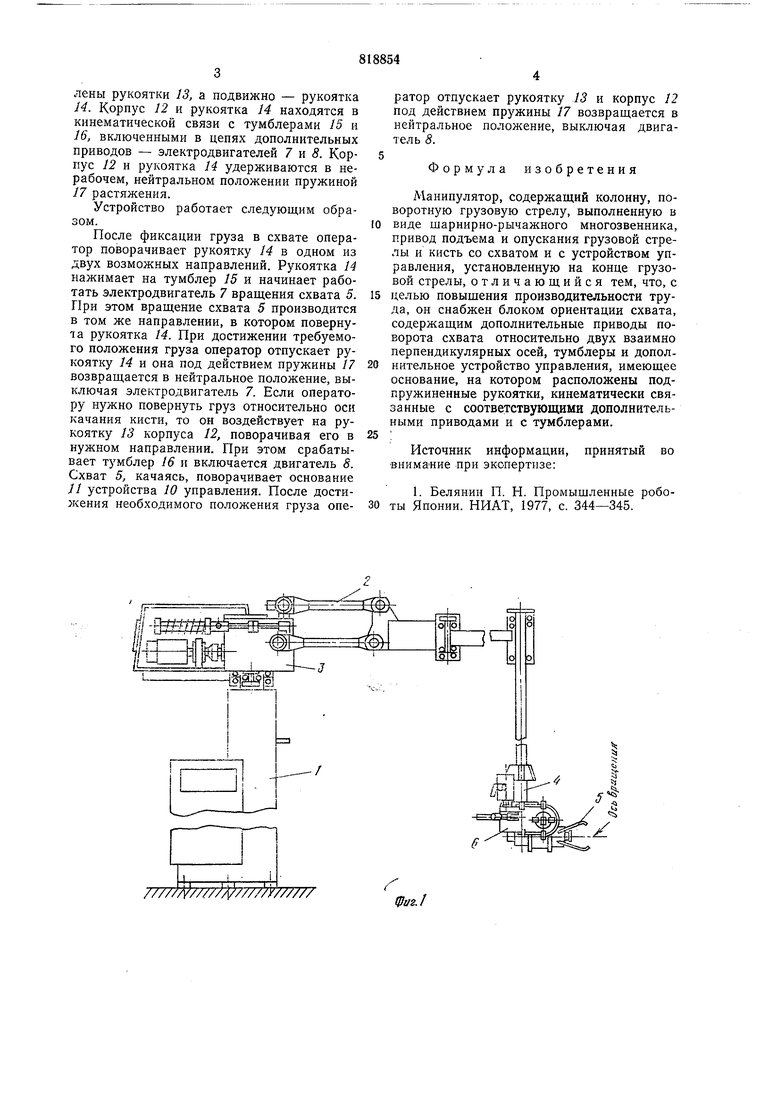
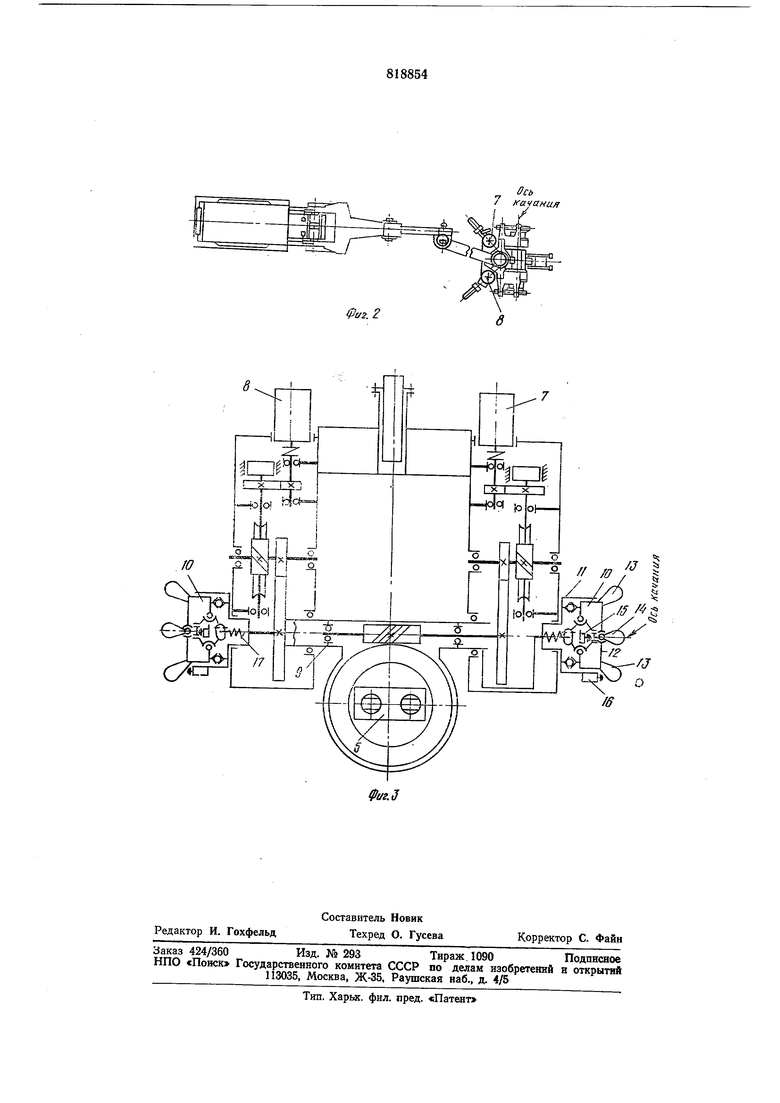
На фиг. 1 показан общий вид предлагаемого манипулятора; на фиг. 2 - то же, вид сверху; на фиг. 3 - схема блока ориентации.
Манипулятор содержит колонну 1, поворотную грузовую стрелу 2, выполненную в виде шарнирно-рычажного многозвенника, привод 3 подъема и опускания стрелы 2 и кисть 4. Кисть 4 несет схват 5. В кисти имеется блок 6 ориентации схвата 5. Блок 6 имеет ось качания и перпендикулярную ей ось вращения схвата 5. Качание и вращение схвата 5 обеспечивается дополнительными приводами - индивидуальными электродвигателями 7 и 8, кинематически связанными с корпусом схвата 5. На торцах полого вала 9, к которому присоединена вращаемая часть блока 6 ориентации схвата, закреплены устройства 10 управления приводами блока 6 (два устройства .10 установлены в данном случае из соображений удобства работы, т. е. для манипулятора достаточно установить одно из этих устройств на любом торце вала 9).
Устройство 10 управления представляет собой основание 11 и подвижный относительно него корпус 12. Подвижность корпуса 12 осуществляется вращением его относительно двух взаимно перпендикулярных осей. На корпусе 12 неподвижно установлены рукоятки 13, а подвижно - рукоятка И. Корпус 12 и рукоятка 14 находятся в кипематической связи с тумблерами 15 и 16, включенными в цепях дополнительных приводов - электродвигателей 7 и 5. Корпус 12 и рукоятка 14 удерживаются в нерабочем, нейтральном положении пружиной 17 растяжения.
Устройство работает следующим образом.
После фиксации груза в схвате оператор поворачивает рукоятку 14 в одном из двух возможных направлений. Рукоятка 14 нажимает на тумблер 15 и начинает работать электродвигатель 7 вращения схвата 5. При этом вращение схвата 5 производится в том же направлении, в котором повернута рукоятка 14. При достижении требуемого положения груза оператор отпускает рукоятку 14 и она под действием пружины 17 возвращается в нейтральное положение, выключая электродвигатель 7. Если оператору нужно повернуть груз относительно оси качания кисти, то он воздействует на рукоятку 13 корпуса 12, поворачивая его в нужном направлении. При этом срабатывает тумблер 16 и включается двигатель S. Схват 5, качаясь, поворачивает основание // устройства 10 управления. После достижения необходимого положения груза оператор отпускает рукоятку 13 и корпус 12 под действием пружины 17 возвращается в нейтральное положение, выключая двигатель 8.
Формула изобретения
Манипулятор, содержащий колонну, поворотную грузовую стрелу, выполненную в виде шарнирно-рычажного многозвенника, привод подъема и опускания грузовой стрелы и кисть со схватом и с устройством управления, установленную на конце грузовой стрелы, отличающийся тем, что, с целью повышения производительности труда, он снабжен блоком ориентации схвата, содержащим дополнительные приводы поворота схвата относительно двух взаимно перпендикулярных осей, тумблеры и дополнительное устройство управления, имеющее основание, на котором расположены подпружиненные рукоятки, кинематически связанные с соответствующими дополнительными приводами и с тумблерами.
Источник информации, принятый во
внимание при экспертизе:
1. Белянин П. П. Промышленные робо30 ты Японии. НИАТ, 1977, с. 344-345.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор с ручным управлением | 1985 |
|
SU1315288A1 |
| ПОДЪЕМНИК ДЛЯ ПОГРУЖЕНИЯ ИНВАЛИДА В БАССЕЙН | 1993 |
|
RU2063376C1 |
| СТРОИТЕЛЬНАЯ МАШИНА | 2017 |
|
RU2754118C2 |
| СТРОИТЕЛЬНАЯ МАШИНА | 2017 |
|
RU2736896C2 |
| Устройство для управления манипулятором | 1987 |
|
SU1445948A1 |
| Головка схвата манипулятора | 1982 |
|
SU1057270A1 |
| Кран-манипулятор К.Б.Розина | 1986 |
|
SU1567506A1 |
| Манипулятор | 1982 |
|
SU1114549A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| Манипулятор | 1984 |
|
SU1283087A1 |
//// / ////// //////У//////
фаг./
Ось
/ качания
Фиг. 2 Л7 // /0 I
