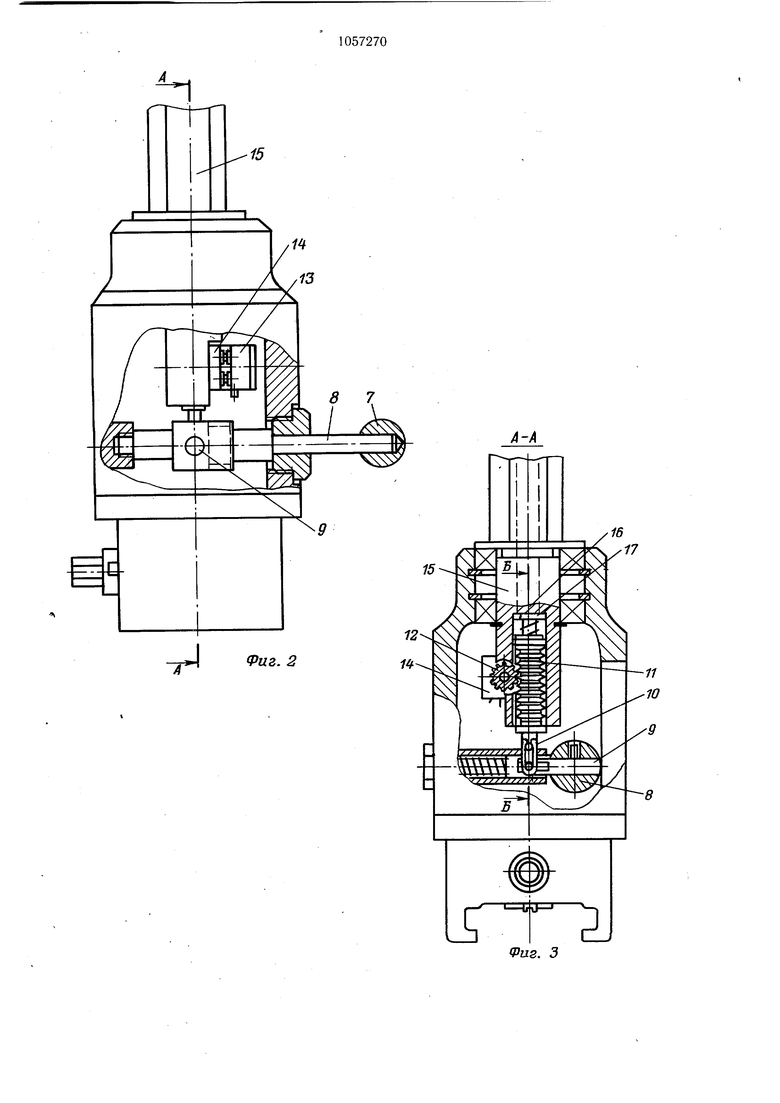
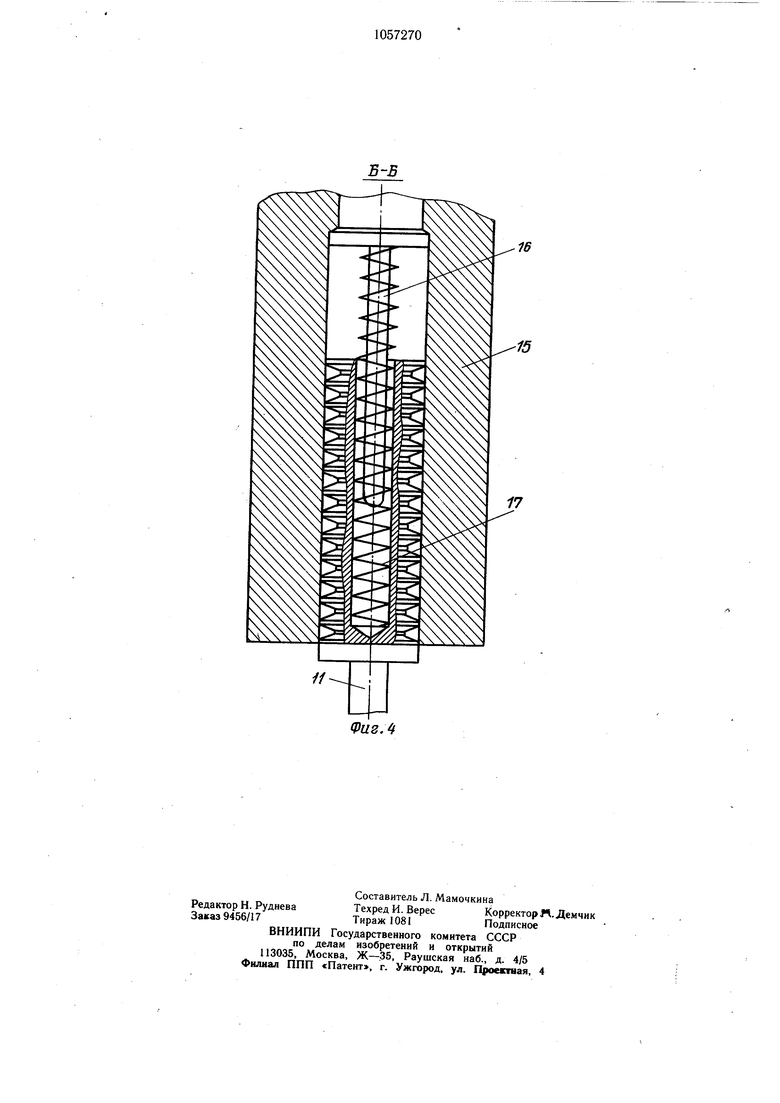
Изобретение относится к подъемно-транспортному машиностроению, а именно к конструкции головки схвата манипулятора с ручным управлением, используемого при погрузочно-разгрузочных операциях и требуюодего точной установки деталей. Известна головка схвата манипулятора, содержащая корпус, ось с каналом, закрепленный на ней потенциометр с шестерней и круговую рейку, установленную с возможностью взаимодействия с последней и кинематически связанную с рукояткой управления 1. Недостатком данной конструкции головки схвата манипулятора является наличие зазоров в кинематической цепи звеньев (рукоятка управления - шестерня потенциометра), связываюш,их рукоятку управления с приводом вертикального перемещения, а также наличие зазора в самом зацеплении рейки с щестерней. Наличие этих зазоров не позволяет добиться стабильного нуля управляющего сигнала при установке рукоятки управления в нейтральное положение, что может повлечь медленное перемещение груза вверх или вниз. Цель изобретения - повышение надежности работы манипулятора. Поставленная цель достигается тем, что головка схвата, содержащая, корпус, ось с каналом, закрепленный на ней потенциометр с шестерней и круговую рейку, установленную с возможностью взаимодействия с последней в канале оси и кинематически связанную с рукояткой управления, снабжена стержнем с опорной шляпкой и надетой на него пружиной, причем в круговой рейке выполнено осевое глухое отверстие, в котором подпружиненно установлен указанный стержень. На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - головка схвата, общий вид; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 3. Головка схвата устанавливается на манипуляторе, который состоит из станционарно установленной колонны 1 с опорноповоротным устройством 2 и корпусом 3, сопрягаемым с опорно-поворотным устройством. На корпусе 3 смонтированы привод 4 вертикального перемещения и стрела 5, выполненная в виде шарнирно-рычажного механизма пантографа. На конце стрелы 5 укреплена головка 6 схвата с рукояткой 7 управления, установленной на валу 8. Через вал 8 проходит ось 9, щарнирно связанная со звеном цепи 10. Также шарнирно звено цепи связано с круговой рейкой 11, которая находится в зацеплении с шестерне й 12 потенциометра 13. Потенциометр с помощью планки 14 крепится к оси 15 головки схвата. В канале оси 15 расположен стержень 16 с опорной шляпкой, на который надета пружина 17 сжатия. Стержень 16 вместе с пружиной размещается в глухом отверстии, которое выполнено в круговой рейке 11. При работе манипулятора оператор с помощью рукоятки 7 перемещает груз в требуемом направлении. При отклонении длинного конца рукоятки 7 вверх ось 9 также отклоняется вверх, воздействуя через звено 10 цепи на круговую рейку 11, которая в свою очередь перемещается вверх в канале оси 15 головки схвата. Находящаяся в зацеплении с круговой рейкой щестерня 12, закрепленная на оси потенциометра, поворачивается на соответствующий угол, изменяя тем самым величину управляющего сигнала. Ввиду того, что круговая рейка постоянно находится под действием пружины 17, люфты, возникающие в кинематической цепи (ось 9 - круговая рейка 11), а также зазор в зацеплении щестерни 12 и рейки убираются и при возэращении рукоятки управления в нейтральное положение возможно получать стабильный нуль-сигнал, что позволит исключить самопроизвольное перемещение головки схвата. Аналогично конструкция головки схвата работает и при отклонении длинного конца рукоятки управления вниз. Предлагаемая конструкция головки схвата позволяет повысить надежность работы манипулятора благодаря обеспечению стабильного положения схвата с грузом, что позволяет избежать производственные травмы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU872251A1 |
| МЕХАНИЗМ ПОДАЧИ ШПИНДЕЛЯ СВЕРЛИЛЬНОГО (РАСТОЧНОГО) СТАНКА | 1966 |
|
SU187480A1 |
| Манипулятор | 1988 |
|
SU1521580A1 |
| Манипулятор | 1988 |
|
SU1590370A1 |
| Манипулятор | 1983 |
|
SU1122502A1 |
| Манипулятор | 1980 |
|
SU908589A1 |
| Манипулятор | 1978 |
|
SU779065A1 |
| Манипулятор | 1981 |
|
SU1002146A2 |
| Устройство для тренировки гребцов | 1982 |
|
SU1069839A2 |
| Манипулятор | 1983 |
|
SU1094734A1 |
ГОЛОВКА СХВАТА МАНИПУЛЯТОРА, содержащая корпус, ось с каналом, закрепленный на ней потенциометр с шестерней и круговую рейку, установленную с возможностью взаимодействия с шестерней потенциометра и кинематически связанную с рукояткой управления, отличающаяся тем, что, с целью повышения надежности работы, она снабжена стержнем с опорной шляпкой и надетой на него пружиной, причем в круговой рейке выполнено осевое глухое отверстие, в котором подпружиненно установлен указанный стержень. (Л ел ISD 
Фиг.
(Pus. 3 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Исследование конвейеров,/подвесных канатных дорог и манипуляторов | |||
| - Сборник научных трудов ВНИИПТмаш | |||
| М., 1980, с | |||
| Термосно-паровая кухня | 1921 |
|
SU72A1 |
