1
Изобретение относится к судостроению, в частности к системам управления рулевыми машинами.
Известна система управления рулевой машиной, содержащая формирователь закона управления, электрически соединенный со входом сумматора, исполнительное устройство, управляюш,ее рулевой машиной, механически связанной с датчиком обратной связи, который электрически связан с другим входом сумматора 1.
Недостатком системы управления рулевой машиной является отсутствие универсальности, так как она предназначена только для управления определенным типом рулевых машин.
Цель изобретения - расширение области применения системы.
Для этого в нее введены последовательно электрически соединенные усилитель-ограничитель, фазочувствительный усилитель, управляемый модулятор с корректором, связанный через переключатель вида выходного напряжения со входом преобразователя выходного напряжения, выход которого электрически подключен к исполнительному устройству, а также генератор импульсов, связанный электрически с другим входом управляемого модулятора, причем вход усилителя-ограничителя электрически подключен к выходу сумматора.
Кроме того, преобразователь выходного напряжения выполнен из двух групп тиристоров, включенных встречно-параллельно.
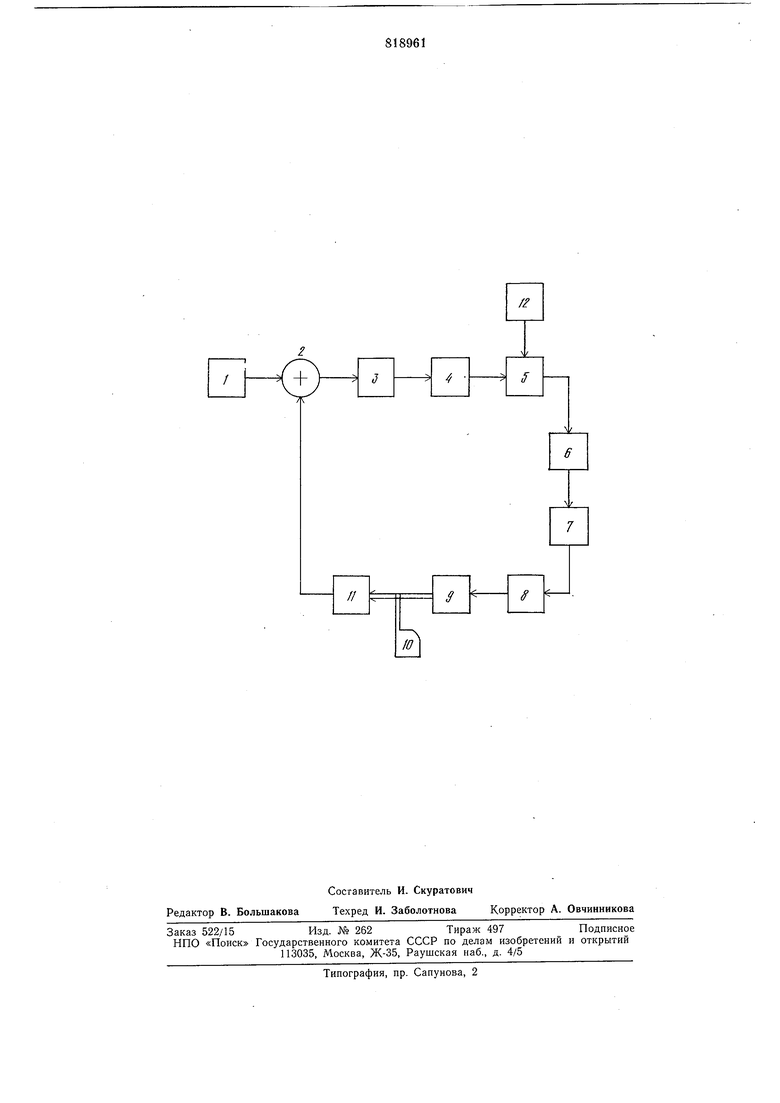
На чертеже представлена схема системы управления рулевой машиной.
Система состоит из последовательно подключенных формирователя закона управления 1, сумматора 2, усилителя-ограничителя 3, фазочувствительного усилителя 4, управляемого модулятора 5, переключателя вида выходного напряжения 6, преобразователя выходного напряжения 7, исполнительного устройства 8, управляюш,его рулевой машиной 9, механически связанной с баллером руля 10 и датчиком обратной связи 11, выход которого соединен с другим входом сумматора, а также генератор импульсов 12, электрически связанный с управляемым модулятором 5 с корректором.
Формирователь закона управления 1 служит для выработки сигналов, пропорциональных углу, скорости (производной) и интегралу угла отклонения судна от заданного курса. Сумматор 2 суммирует сигналы от формирователя закона управления 1 и датчика обратной связи 11. Усилительограничитель предназначен для усиления и ограничения по амплитуде сигналов, поступающих от сумматора 2. Фазочувствительный усилитель 4 преобразует переменное напряи ение с усилителя-ограничителя 3 в постоянное напряжение определенной полярности в зависимости от фазы входного напряжения. Управляемый модулятор 5 с корректором преобразует постоянное напряжение с фазочувствительного усилителя 4 в серию импульсов определенной формы и фазы, причем фаза импульсов может регулироваться корректором, а частота импульсов задается генератором импульсов 12. Переключатель вида выходного напряжения 6 управляет порядком работы тиристоров преобразователя выходного напряжения 7. Исполнительное устройство 8 управляет работой рулевой машины 9, механически связанной с баллером руля 10 и датчиком обратной связи 11. Работа системы управления рулевой машиной осуществляется следующим образом. При изменении курса судна формирователь закона управления 1 вырабатывает сигнал, пропорциональный углу скорости (производной) и интегралу угла отклонения судна от заданного курса, который через сумматор 2 поступает на усилитель-ограничитель 3 и после усиления и ограничения по амплитуде выпрямляется фазочувствительным усилителем 4 в напряжение определенной полярности в зависимости от направления отклонения судна от заданного курса и преобразуется управляемым модулятором 5 с корректором в серию импульсов определенной формы и фазы, причем фаза импульсов регулируется корректором, а частота импульсов задается генератором импульсов 12. С управляемого модулятора 5 с корректором 11 импульсы через переключатель вида выходного напряжения 6 поступают на входы преобразователя выходного напряжения 7, в котором питающее напряжение преобразуется в зависимости от положения переключателя 6 в напряжение постоянного тока определенной полярности или напряжение переменного тока определенной фазы определяемой направлением отклонения судна от заданного курса. Выход преобразователя выходного напряжения 7 электрически связан с исполнительным устройством 8, управляющим работой рулевой машипы 9, которая начнет перекладывать баллер руля 10 и механическн связанный с ним датчик обратной связи 11 на угол, необходимый для возвращения судна на заданный курс. Руль будет перекладываться до тех пор, пока сигнал обратной связи с датчика 11 не станет равным сигналу формирователя закона управления 1. Введение в систему управления рулевой машиной усилителя-ограничителя, фазочувствительного усилителя, управляемого модулятора с корректором, переключателя вида выходного напряжения, преобразователя выходного напрялсения и генератора импульсов позволяет расширить область применения системы управления для различных рулевых машин и сделать ее универсальной. Формула изобретения 1. Система управления рулевой машиной. содержащая формирователь закона управления, электрически соединенный со входом сумматора, исполнительное устройство, управляющее рулевой машиной, механически связанной с датчиком обратной связи, который электрически связан с другим входом сумматора, отличающаяся тем, что, с целью расширения области применения системы, в нее введены последовательно электрически соединенные усилитель-ограничитель, фазочувствительный усилитель, управляемый модулятор с корректором, связанный через переключатель вида выходного напрял ения со входом преобразователя выходного напряжения, выход которого электрически подключен к исполнительному устройству, а также генератор имнульсов, связанный электрически с другим входом управляемого модулятора, причем вход усилителя-ограничителя электрически подключен к выходу сумматора. 2. Система по п. 1, отличающаяся тем, что преобразователь выходного напряжения выполнен из двух групп тиристоров, включенных встречно-параллельно. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 483305, кл. В 63Н 25/04, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления электрогидравлической рулевой машиной | 1988 |
|
SU1615059A1 |
| Система управления электрогидравлической рулевой машиной | 1973 |
|
SU483305A1 |
| Система управления электрогидравлической рулевой машиной | 1983 |
|
SU1113307A2 |
| Авторулевой | 1988 |
|
SU1579851A1 |
| Система управления электрогидравлической рулевой машиной | 1988 |
|
SU1518199A2 |
| Автоматический стабилизатор курса судов | 1959 |
|
SU126383A1 |
| Авторулевой | 1988 |
|
SU1527092A1 |
| Рулевое устройство судна | 1982 |
|
SU1041419A1 |
| Авторулевой | 1988 |
|
SU1533950A1 |
| Устройство автоматического управления курсом судна | 1984 |
|
SU1237555A1 |