Изобретение относится к судовой автоматике, в частности к устройствам стабилизации судна на заданном курсе.
Целью изобретения является повышение эффективности управления.
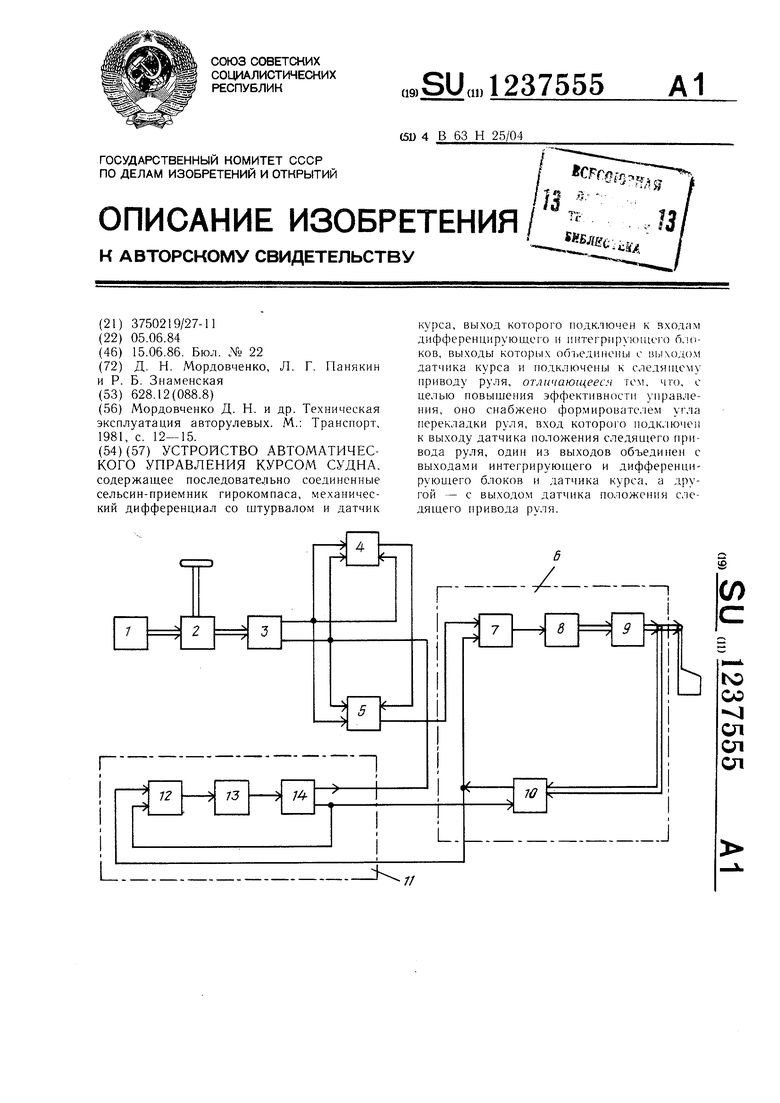
На че)теже приведена блок-схема устройства.
Устройство автоматического управления курсом судна содержит последовательно соединенные сельсин-приемник 1 гирокомпаса, механический дифференциал 2 со и1турва- лом и датчик 3 курса, выход которого подключен к входам дифференцирующего блока 4 и интегрирующего блока 5. Выходы датчика 3, блоков 4 и 5 объединены и подключены к следящему приводу 6 руля, со- .тержащего последовательно соединенные усилитель 7 мощности, исполнительный механизм 8, рулевую машину 9. В цепь обратной связи следящего привода 6 включен датчик 10 положения руля, выход кото- рого подключен к формирователю 11 скорости изменения угла перекладки руля. Формирователь 11 содержит последовательно соединенные демодулятор 12 с фильтром, дифференцирующий усилитель 13 и модулятор 14. Выходы формирователя 11, которыми являются выходы модулятора 14, объединены соответственно с выходами датчика 3, дифференцирующим и интегрирующим блоками 4 и 5, а также с выходом датчика 10 следящего привода 6.
Устройство автоматического у 1равления курсом судна работает следующим образом.
5
0 о
5
При отклонении судна от заданного курса от гирокомпаса поступает сигнал на сельсин-приемник 1, который через дифференциал 2 разворачивает датчик 3 курса, вход которого электрически связан с входами дифференцирующего и инте1-рирующего блоков 4 и 5. На выходе датчика 3 курса .дифференцирующего и интегрирующего блоков 4 и 5 формируются сигналы, пропорциональные углу скорости и интегралу от угла рыскания. Усиленный усилителем 7 мощности суммарный сигнал поступает на исполнительный механизм 8, который воздействует на управляющий орган рулевой машины 9. Релувая машина 9 поворач.ивает руль и датчик 10 ноо южения руля. Сигнал с датчика 10 поступает на вход формирователя 11.
Сигнал датчика 10 демодулируется и фильтруется демодулятором 12, дифференцируется усилителем 13. На вход модулятора 14 поступает сигнал, пропорциональный производной от угла перекладки руля. Сигнал с выхода формирователя 11 вместе с сигналами, пропорциональными yi .y, производной и интегралу от уг ла рыскания, с выходов датчика 3, блоков 4 и 5 поступает на вход следящего привода 6, куда также поступает сигнал с выхода датчика 10. Перекладка руля происходит до тех пор, пока сигналы, проиорциональные углу, производной и интегралу от угла рыскания, не станут равны сигналам но углу перекладки руля и его производной. Перекладка руля прекратится, и судно начнет возвращаться на заданный курс.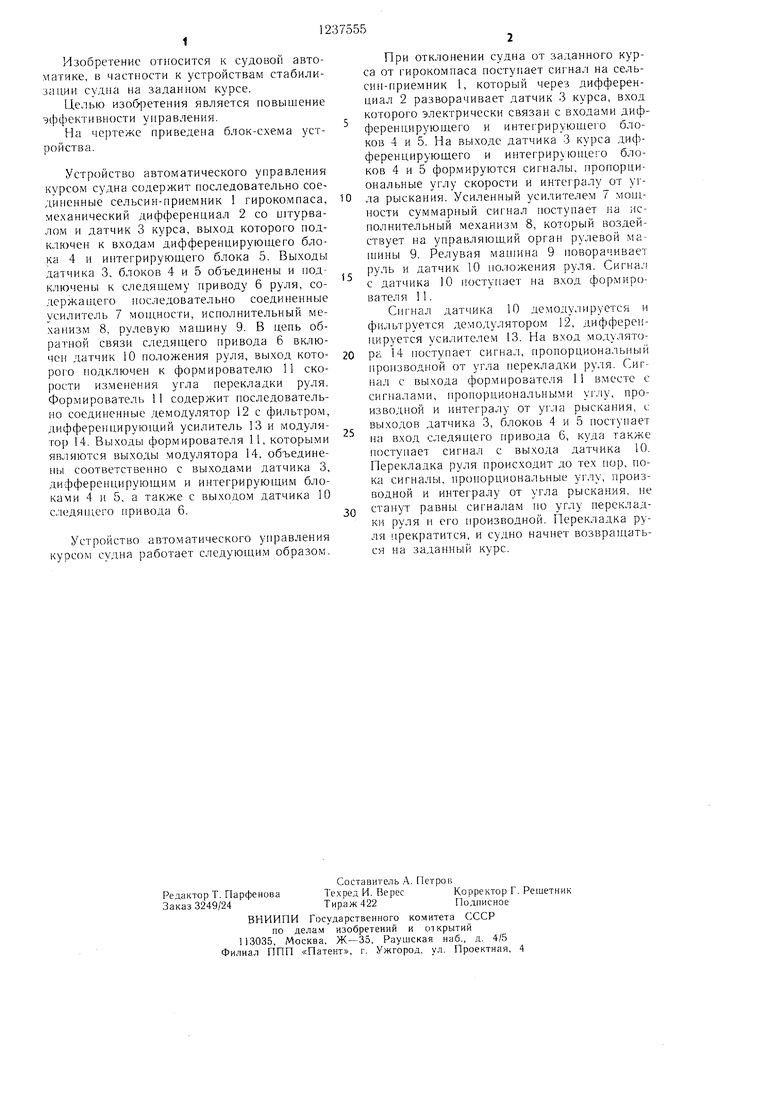
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления курсом судна | 1983 |
|
SU1131772A1 |
| Система стабилизации судна по курсу и бортовой качке | 1982 |
|
SU1030260A1 |
| Авторулевой | 1988 |
|
SU1579851A1 |
| Судовой авторулевой | 1982 |
|
SU1017594A1 |
| Система управления электрогидравлической рулевой машиной | 1988 |
|
SU1615059A1 |
| Стенд для регулировки и испытаний системы управления курсом судна | 1982 |
|
SU1063710A1 |
| Авторулевой | 1988 |
|
SU1527092A1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| Система управления судном | 1977 |
|
SU644666A1 |
| Система управления электрогидравлической рулевой машиной | 1983 |
|
SU1113307A2 |
| Мордовченко Д | |||
| Н | |||
| и др | |||
| Техническая эксплуатация авторулевых | |||
| М.: Транспорт, 1981, с | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
