.(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НЕПЕРПЕНДИКУЛЯРНОСТИ ПОВЕРХНОСТЕЙ ДЕТАЛЕЙ 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения отклоне-Ния OT СООСНОСТи | 1978 |
|
SU800601A1 |
| Прибор для контроля перпендикулярности оси относительно ее базового торца | 1990 |
|
SU1744427A1 |
| Виброконтактный датчик-измеритель отклонений размеров | 1986 |
|
SU1409858A1 |
| Устройство для измерения неперпендикулярности оси отверстия к торцу | 1978 |
|
SU877317A1 |
| Устройство для измерения отклонения от перпендикулярности поверхностей деталей | 1986 |
|
SU1388698A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИАМЕТРОВ ГЛУБОКИХ ОТВЕРСТИЙ | 2002 |
|
RU2229685C2 |
| Устройство для измерения размеров стыковых сварных соединений | 1989 |
|
SU1709173A1 |
| Устройство для измерения неперпендикулярности оси отверстия к торцу | 1988 |
|
SU1629742A1 |
| Устройство активного контроля размеров деталей | 1986 |
|
SU1404305A1 |
| СИСТЕМА ДЛЯ АКТИВНОГО КОНТРОЛЯ РАЗМЕРОВ ДЕТАЛЕЙ И РЕГУЛИРОВАНИЯ ДЕФОРМАЦИЙ КРУГЛОШЛИФОВАЛЬНОГО СТАНКА | 1989 |
|
RU2014208C1 |
1
Изобретение относится к измерительной технике, в частности к уотл ройствам для измерения прямых углов между поверхностями деталей.
-Известны устройства для измерени неперпендикулярности поверхностей деталей, содержащие основание с базвой поверхностью, установленный на основании измеритель с образцовым .. перемещением перпендикулярно оснований I.
Недостатке известного устрЬйства- является необходимость образцового перемещения измерителя и точной установки детали в устройстве.
Наиболее близким к изобретению по технической сущности является .устройство для измерения неперпендикулярности поверхностей деталей, содержащее корпус, установленные в нем три опоры, оси кЬторых расположены в одной плоскости, причем оси двух из них параллельны:.- одна другой, а ось третьей перпендикулярна . им, основной измерительный наконечник, установленный в плоскости расположения осей опор параллельно оси третьей опоры, и измеритель ли:нейных перемещений, взаимодействующий с основным измерительным наконечником f 2 J.
Недостатком такого устройства является ограниченная точность измерения, вызываемая тем, что, если деталь не плотно прижимается к опо-. рам, появляется погрешность измерения.
С целыо повышения точности измерения предлагаемое устройство снабжено тремя дополнительными наконечниками, размещенными в плоскости расположения осей опор так, что два из них параллельны опорам с параллельными осями, а третий параллелен основному измерительному наконечнику, двумя под-
.вижными регистрами и тремя дифференциальными передачами, первая из которБК кинематически связана с двумя дополнительными измерительными наконечниками и одним из регистров, вторая - с третьим дополнительным . и основным измерительным наконечниками и другим регистром, третья с обоими регистрами и измерителем
линейных перемещений.
Такое выполнение устройства поз |воляет исключить погрешность изме рения, вызванную отсутствием контак та С опорами устройства.
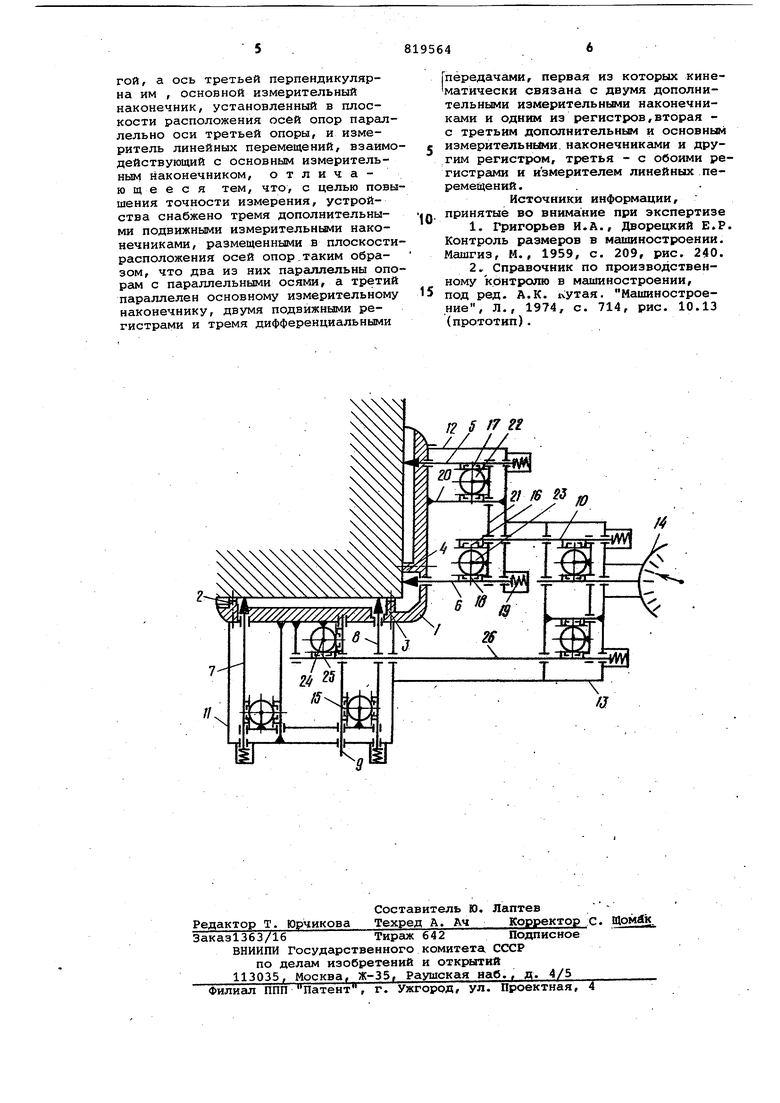
На чертеже показано предложенное устройство, продольный разрез
В корпусе 1 устройства установлены три опоры 2, 3 и 4, оси кото1шх расположены в одной плоскости. Ося опор 2 и 3 параллельны друг другу, а ось опоры 4 перпендикулярна им. Кроме того, в плоскости расположения осей опор размещены основной 5 и три дополнительных 6, 7 и в измерительных наконечника. Наконечники 5 и 6 установлены параллельно оси опоры 4, а наконечники 7, 8 осям опор 2, 3. Расстояние между наконечниками 5 и б равно расстоянию между наконечниками 7 и 8.
В корпусе устройства расположены два регистра 9 и 10, три дифференциальные передачи 11, 12 и 13 и изм ритель линейных перемещений 14. Первая из дифференциальных передач кинематически связана с допог.нитель-: ными измерительньви1и наконечникаш 7, Б и регистром 9, вторая - с основным 5 и дополнительным 6 измерительными наконечниками и регистром 10, а третья - с регистрами 9, 10 и измерителем линейных перемещений 14. Регистры 9 и 10 выполН.ены, например, в виде подвижного стержня с рейками 15, 16.
Дифференциальные передачи 11, 12, 13 выполнены идентично и отличаются лишь входными и выходньвш злементами. Например, для дифференциальной передачи 12 входньоли. злементами являются основной 5 и дополнительный 6 измерительные наконечники, а выходным элементомрегистр 10. Основной измерительный наконечник выполнен с рейкой 17 и подпружинен пружинойj дополнительной измерительный наконечник 6 вып нен с рейкой 18 и подпружинен пружиной 19, вырсодной злемент - регис 10 выполнен с рейкой 16. Кроме того, дифференциальная передача 12 содержит неподвижную рейку 20, установленную параллельно измерительным наконечникам 5 и 6, и подвижную в направлении перемещения измерительных наконечников 5 и 6 каретку 21 с зубчатьми шестернями 22 и 23, первая из которых зацеплена с рейками 17 и 20, а втора с рейками 16 и 18.
Регистр 10 кинематически связан с дифференциальной передачей 11 через установленную на корпусе 1 зубчатую шестерню 24 и зубчатую реку 25 подвижного стерж|)я 26.
Работает дифференциальная передача, например, 12 следующим образом.
Если измерительные наконечники 5 и 6 перемещаются на одинаковую величину, то измерительный наконечник 5 вращает через рейку 17 зубчатое колесо 22, которое, обкатывая жестко закрепленную на корпусе 1 рейку 20, перемещает каретку 21 на половину величины перемещения накос нечника 5. Одновременно измерительный наконечник 6 через рейку 18 вращает зубчатое колесо 23, которое поднимается вместе с кареткой 21 на ту же половину перемещения измеритее льного наконечника 6, обкатывая зуб.чатую рейку 16 регистра 10. В результате регистр 10 остается неподвижным относительно корпуса 1. Если измерительные наконечники 5 и 6 перемещаются на неодинаковую величину,
5 то регистр 10 перемещается на разность их перемещений.
Устройство работает следующим образом.
Перед измерением в устройство устанавливается эталонная деталь и измеритель линейных перемещений 14 направляется на ноль. Далее в устройство устанавливается контролируемая деталь. Если она при установке смещается в направлении перемещения измерительных наконечников, то измерительные наконечники 5 и 6 перемещаются на одну и ту же величину, наконечники 7 и 8 - также на одну
Q и ту же величину. Такое перемещение . наконечников не вызывает.перемещения регистров 9 и 10 и измеритель линейных перемещений ничего не показывает.
Если контролируемая деталь при установке поворачивается относительно устройства, например, по часовой стрелке, то регистры 9 и 10 перемещаются на одинаковую величину и всле дствие наличия дифференциальной передачи 13 измеритель линейных перемещений не показывает отклонения от прямого угла.
Если контролируемая деталь имеет отклонение от перпендикулярности,
5 то измеритель линейных перемещений показывает линейную величину отклонения контролируемых поверхностей от перпендикулярности на расстояние, равное расстоянию между параллельными измерительными наконечниками.
Такое выполнение устройства позволяет исключить влияние погрешности базировки детали относительно уст ройства на результат измерения непер
пендикулярности,
Формула изобретения
40 Устройство для измерения неперпендикулярности поверхностей деталей, содержащее корпус, установленные в нем три опоры/ оси которых расположены в одной плоскости, причем оси
65 -двух из них параллельны одна другой, а ось третьей перпендикулярна им , основной измерительный наконечник, установленный в плоскости расположения осей опор параллельно оси третьей опоры, и измеритель линейных перемещений, взаимодействующий с основным измерительным наконечником, о т л и ч а ю щ е е с я тем, что, с целью повышения точности измерения, устройства снабжено тремя дополнительными подвижными измерительными наконечниками/ размещенными в плоскостирасположения осей опор.таким образом, что два из них парешлельны опорам с параллельными осями, а третий параллелен основному измерительному наконечнику, двумя подвижными регистрами и тремя дифференциальными
|передачсии|и, первая из которых кинематически связана с двумя дополнительными измерительными наконечниками и одним из регистров,вторая с третьим дополнительным и основным измерительными.наконечниками и другим регистром, третья - с обоими регистрами и измерителем линейных перемещений .
Источники информсщии, принятые во внимание при экспертизе
0
2,Справочник по производственному контролю в машиностроении,
5 под ред. А.К. кутая. Машиностроение, Л., 1974, с. 714, рис. 10.13 (прототип). йJ2 S 17 21 // //
