1
Изобретение относится к области машиностроения, в частности к конструкции гидравлических прессов.
Известен регулятор торможения поперечины гидравлического пресса, со 5 держащий элемент сравнения сигналов датчика координаты поперечины, коммутируемого ключом задатчика высоты подъема поперечины и функционального преобразователя, а также усилитель 0 мощности, соединенный с исполнительным механизмом, и гидроусилитель с клапанным распределителем управления траверсой пресса 1J .
Недостатками известного регулято- 15 ра являются недостаточная точность ковки при изменении параглетров регулятора и пресса, а также снижение производительности из-за ручной подстройки режима при указанных отноше- , ниях параметров, влияющих на точность ковки.
С целью повышения точности и производительности регулятор торможения поперечины гидравлического пресса 25 снабжен блоком реверса и самонастракваюдимся устройством,выполненньж в виде блоков дифференцирования и памяти, порогового и логического элементов и нуль-органа, при этом входы блока 30
памяти соединены с выходами датчиков координаты поперечины, блока реверса и логического элемента, а выход - с элементом сравнения, причем выходы порогового элемента, блока реверса и нуль-органа соединены с входами логического элемента, выход блока дифференцирования связан с входом нуль,органа, а выход датчика координаты поперечины подключен к входам порогового элемента и блока дифференцирования.
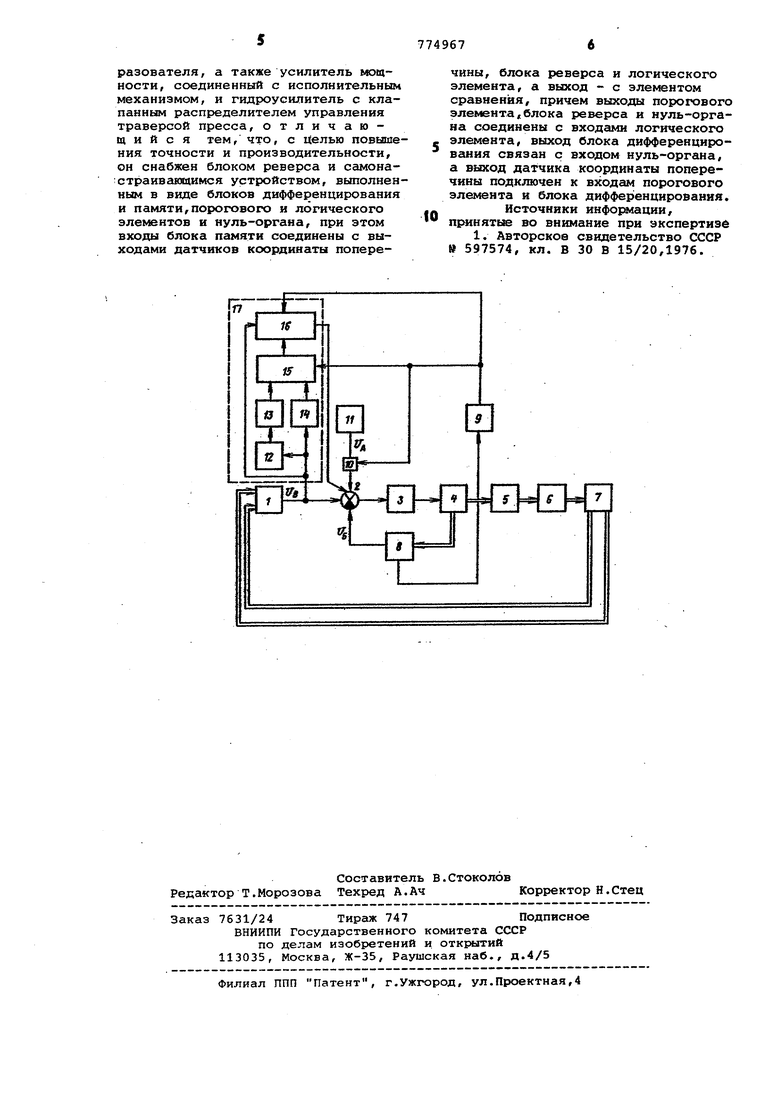
На чертеже представлена блок-схема регулятора,
Регулятор торможения содержит датчик 1 координаты поперечины, элемент 2 сравнения, усилитель 3 мощности, исполнительный механизм 4, гидроусилитель 5, клапанный распределитель б, пресс 7, функциональный преобразователь 8, блок 9 реверса, ключ 10, коммутируемый задатчик 11 высоты подъема поперечины, блок 12 дифференцирования координаты подвижной поперечины, нуль-орган 13, пороговый элемент 14 соединенные между собой логический элемент 15, блок 16 памяти. При этом, соединенные между собой блок 12 дифференцирования координаты подвижной поперечины, нуль-орган 13, пороговый
элемент 14, логический элемент 15 и блок 16 памяти являются самонастраиБающимся устройством 17, обеспечивающим автоматическую коррекцию параметров.
Регулятор работает следующим образом.
В исходном состоянии поперечина находится в нижней заданной точке, соответствующей заданному размеру поковки. При этом сигналы LL ,и„ ,и„ соответственно с задатчика al высоты подъема поперечины, фyнкциoнaль ного преобразователя 8, датчика 1 координаты подвижной поперечины равны нулю, выходное звено электрогидравлического исполнительного механизма занимает среднее положение, и блок 9 реверса в исходном состоянии выдает команду на движение вверх; блок памяти получает разрешение на запоминание заданного размера поковки (сигналом датчика 1 координаты поперечины, равным нулю). При введении задаН.ИЯ высоты подъема поперечины задатчиком 11 на входе элемента 2 сравнения появляется сигнал U .и через усилитель 3 вызывает перемещение выходного звена злектрогидравлического исполнительного механизма в крайнее положение, соответствующее открытию клапанов на движение вверх.
По мере подъема поперечины сигнал и„ возрастает, и в момент равенства нулю алгебраической суммы сигналов Од ,Ug ,и„ на входе элемента 2 сравнения изменяется фаза сигнала на его выходе. Вьйходное звено электрогидравлического исполнительного механизма в режиме слежения за убывающей разностью Цд (и ) начинает перемещаться к среднему положению, вызывая закрытие клапанов и торможение поперечины. Сигнал при этом также убывает.
При достижении поперечиной верхней заданной точки U Уд, а , выходное звено электрогидравлическог исполнительного механизма возвращается всреднее положение, клапаны полностью закрываются и поперечина останавливается в заданной точке.При приближении сигнала к нулю блок 9 реверса выдает команду на реверс поперечины, под действием которой коммутационный ключ 10 отключает сигнал и от элемента 2 сравнения, в результате чего на него поступают только сигналы Ug и и . Выходное звено электрогидравлического исполнительного механизма под действием сигнала и перемещается в другое крайнее положение, при этом открываются клапаны, обеспечивающие движение.поперечины вниз.
По мере опускания поперечины сигнал и убывает, и в момент равенства нулю алгебраической суммы сигналов
;U ,и„ изменяется фаза сигнала на выходе сумматора. Выходное звено электрогидравлического исполнительного механизма в режиме за убывающей разностью и и начинает перемещаться г к среднему положению, вызывая закрытие клапанов и торможение поперечины. Сигнал Ug при этом также убывает.При приближении сигнала Ug к величине, соответствующей заданному размеру, срабатьавает пороговый элемент 14, В момент достижения поперечиной нижней заданной точки Ug О, выходное звено электрогидравлического исполнительного механизма приходит в среднее поf ложение, при этом ) О, клапаны пол костью закрываются, а поперечина в силу изменившихся параметров пресса проходит заданную точку, перековав по-ковку. При приближении к нулю U блок 9 реверса вьщает команду на ре0 вере поперечины, под действием которой коммутационный ключ 10 подключает сигнал Уд к элементу 2 сравнения, в результате чего на него снова поступают сигналы Уд / Wg f U и цикл 5 повторяется.
В момент перехода поперечины через нижнюю точку реверса скорость поперечины падает до нуля и на выходе нуль-органа 13 появляется сигнал поQ ложительной полярности. Наличие на входе логического элемента 15 сигналов положительной полярности порогового устройства 14, нуль органа 13 и блока 9 реверса приводит к появлес нию на входе блока 16 памяти разрешающего сигнала на запоминание величины перекова.
При движении поперечины вверх на вход элемента 2 сравнения дополнительно поступает инвертированный сигнал 0 перекова, а вниз - неинвертированный по команде блока 9 реверса. В результате этого реверс поперечины вверху и внизу происходит раньше на величину перекова, что обусловли 5 вает уменьшение заданной высоты подъема над поковкой и приход поперечины на заданный размер на последующем ходе.
Эффективность применения регуляQ тора обусловливается повышением точности ковки, при изменениях параметров регулятора и пресса, а также увеличением производительности пресса путем автоматической коррекции заданной высоты подъема поперечины над поковкой одновременно с коррекцией прихода на заданный размер.
Формула изобретения
Регулятор торможения поперечины гидравлического пресса, содержащий элемент сравнения сигналов датчика координаты поперечины, коммутируемого ключом задатчика высоты подъема поперечины и функционального преобразователя, а также усилитель лющности, соединенный с исполнительным механизмом, и гидроусилитель с клапанным распределителем управления траверсой пресса, отличающийся тем, что, с Целью повышения точности и производительности, он снабжен блоком реверса и самона:страивающимся устройством, выполненным в виде блоков дифференцирования и памяти,порогового и логического элементов и нуль-органа, при этом входы блока памяти соединены с выходами датчиков координаты поперечины, блока реверса и логического элемента, а выход - с элементом сравнения, причем выходы порогового элемента«блока реверса и нуль-органа соединены с входами логического элемента, выход блока дифференцирования связан с входом нуль-органа, а Ш2СОД датчика координаты поперечины подключен к входам порогового элемента и блока диффер енцирования.
Источники информации,
0 принятые во внимание при экспертизе
1. Авторское свидетельство СССР 597574, кл. В 30 В 15/20,1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор торможения поперечины гидравлического пресса | 1979 |
|
SU770841A1 |
| Система управления гидравлическимпРЕССОМ | 1979 |
|
SU821205A1 |
| Регулятор торможения поперечиныгидРАВличЕСКОгО пРЕССА | 1979 |
|
SU821206A1 |
| Система управления гидравлическимпРЕССОМ | 1979 |
|
SU821204A1 |
| Регулятор торможения поперечины гидравлического пресса | 1979 |
|
SU856860A1 |
| Система управления гидравлическим прессом | 1980 |
|
SU903213A1 |
| Система управления гидравлическим прессом | 1980 |
|
SU903212A1 |
| Блок-схема управления гидравлическими прессами | 1976 |
|
SU737244A1 |
| Регулятор торможения поперечины гидравлического пресса | 1976 |
|
SU597574A1 |
| Регулятор торможения поперечины гидравлического пресса | 1978 |
|
SU727477A1 |
