1
Изобретение относится к области машиностроения, в частности к конструкции систем управления гидропрессами.
Известен регулятор торможения 5 поперечины гидравлического пресса, содержащий элемент сравнения сигналов задатчика высоты подъема поперечины, датчиков координаты поперечины и датчика функциональной обрат- 10 ной связи, усилитель с электрогидравлическим исполнительным механизмом, соединенные с гидроусилителем, логическое устройство, связанное с ключом I.15
Известный регулятор не обеспечивает достаточно точного и надежного торможения поперечины из-за наличия механической передачи в -системе функциональной обратной связи. 20
С целью повышения надежности и точности работы регулятор торможения поперечины гидравлического пресса снабжен блоком диЛференцирования сигналов датчиков координаты поперечины,25 квадротором,датчиком зоны нечувствительности с памятью и вычислительным устройством с памятью,а датчик функциональной обратной связи выполнен в виде блока пропорциональной обратной
связи и связанного с ним электронного нелинейного преобразователя, выход которого подключен ко входу элемента сравнения, при этом входы вычислительного устройства с памятью связаны с выходами датчиков координаты поперечины, квадратора, логического устройства и ключа, а выход - с входом электронного нелинейного преобразователя, вход блока дифференцирования соединен с выходом датчиков координаты поперечины, а его выход - с в.ходом квадратора, вход логического устройства соединен с выходом блока пропорционгшьной обратной связи.
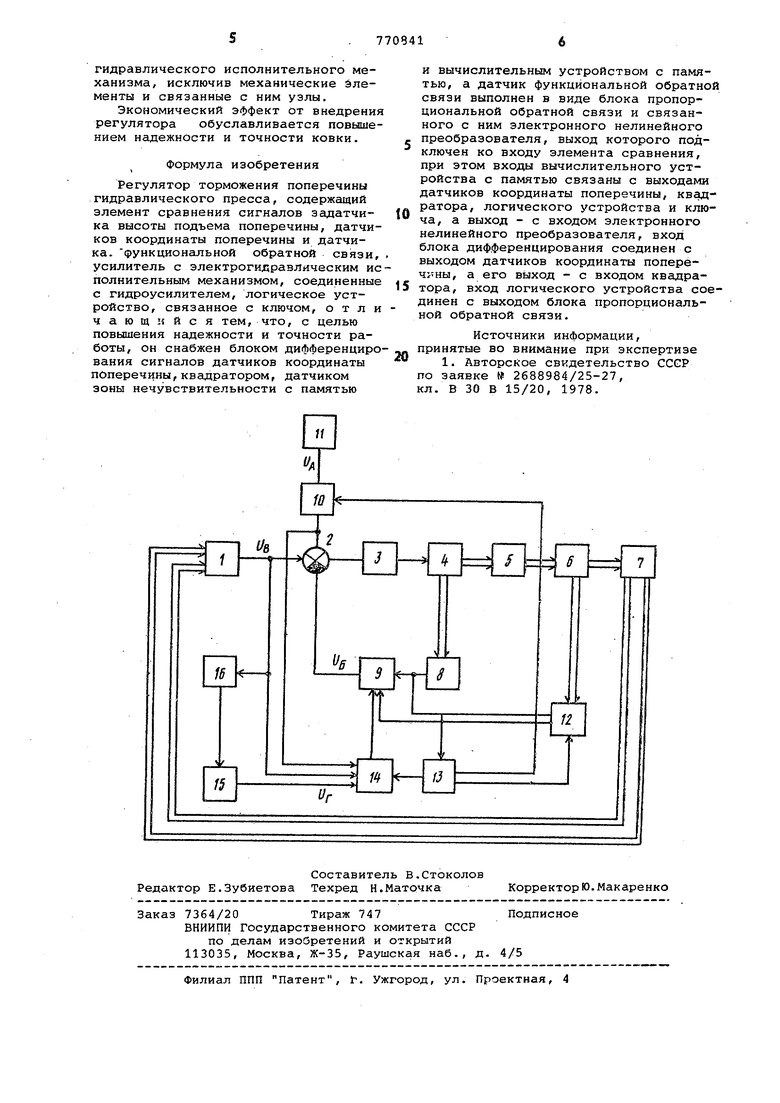
На чертеже представлена блок-схема регулятора торможения поперечины гидравлического пресса.
Регулятор содержит датчики 1 координаты поперечины, элем1 нт сравнения 2, усилитель мощности 3, электрогидравлический исполнительный механизм 4, гидроусилитель 5, клапанный распределитель 6, пресс 7I блок 8 пропорциональной обратной связи, электронный нелинейный преобразователь 9, ключ 10, коммутирующий задатчик 11 высоты подъема, датчик 12 зоны нечувствительности с памятью, логичест кое устройство 13, вычислительное устройство 14 с памятью, квадратор 1 возводящий производную координатыподвижной поперечины 16. - Регулятор работает следующим обра зом, В исходном состоянии поперечина находится в нижней заданной точке, соответствующей,заданному размеру поковки. При этом сигналы, соответст венно с задатчика 11 высоты подъема поперечины Уд, электронного нелинейного преобразователя 9 (i, датчиков 1 координаты подвижной поперечины )„ равны нулю, выходное звено электрогидравлического исполнительного меха низма занимает среднее положение, и логическое устройство 13 в исходном состоянии выдает команду на движение вверх. При введении заданной высоты подъема поперечины задатчиком 11 на входе элемента t сравнения 2 появляется сигнал Уд и через усилитель 3 вызывает перемещение выходного звена электрогидравлического исполнительного механизма в крайнее положение, соответствующее открытию клапанов на движение поперечины вверх. По мере подъема поперечины сигнал Ug возрастает и в момент равенства нулю алгебраической сигналов на входе, вычислительного .устройства 14 происходит запоминание сигнала Up, пропорционального квадрату скорости поперечины, и задание на электронном нелинейном преобразователе . величины сигнала Ug, пропорционального квадрату скорости поперечины. В результате этого на входе элемента сравнения 2 установится в этот момен также равенство нулю алгебраической суммы сигналов Уд, И, Ug, и в этот момент будет началом торможения поперечины при подходе к заданной верхней точке по закону, заложенному в электронном нелинейном преобра зователе. При изменении сигнала Ug изменится фаза сигнала на выходе эл мента суммирования. Выходное звено электрогидравлического исполнительн го механизма в режиме слежения за убывающей разностью U - (U + U) начнет перемещаться к среднему поло жению, вызывая закрытие клапанов и торможение поперечины. Сигнал U пр этом также убывает. При достижении поперечиной верхней заданной точки U|- f, выходное звено эле тро1-идравлического исполнительного механизма возвращается в среднее по ложение, клапаны полностью закроются и поперечина остановится в задан ной точке. При приближении к нулю U и, следовательно, сигнала пропорцио нальной обратной связи, логическое устройство выдает команду на реверс поперечины, под действием которой к мутационный ключ 10 отключает сигна Чд с элемента суммарования, в резул ате чего на элемент суммирования удут поступать только сигналы и и Ug. Выходное звено электрогидравлиеского исполнительного механизма под ействием сигнала U переместится в ругое крайнее положение, при этом открываются клапаны, обеспечивающие движение поперечины вниз, сигнал Ug уменьшается и в момент равенства нулю алгебраической суммы сигналов на входе вычислительного устройства 14 происходит запоминание значения сигнала, пропорционального квадрату скорости поперечины U, и задания на электронном нелинейном преобразователе величины сигнала U, пропорционального квадрату скорости поперечины. В результате этого на входе элемента сравнения 2 установится в этот момент также равенство нулю алгебраической суммы сигналов U.Ug.U и этот момент будет началом торможения поперечины при подходе к нижней заданной точке по закону, заложенному в электронном нелинейном преобразователе. При изменении сигнала и„ изменится фаза сигнала элемента суг/1мирования. Выходное звено электрогидравлического исполнительного механизма в режиме за убывающей разностью и - Ug начнет перемещаться к среднему положению, вызывая закрытие клапанов и торможение поперечины. Сигнал Ug при ЭТ9М также убывает. При достижении поперечиной нижней заданной точки и„ О выходное звено электрогидравг лического исполнительного механизма приходит в среднее положение, при этом Ug О, клапаны полностью закрываются и поперечина остановится в заданной точке. При приближении к нулю Ug и, следовательно, сигнала пропорциональной обратной связи логическое устройство выдает команду .на реверс поперечины, под действием которой комутационный ключ 10 под- ключает сигнал U к элементу суммирования, в результате чего на элемент суммирования будут снова поступать сигналы U, Ug и цикл повторяется. При изменении зоны, нечувствительности оборудования пресса с помощью датчика зоны нечувствительности 12 будет корректироваться на каждом ходе зона нечувствительности, заложенная в электронном нелинейном преобразователе в соответствии с реальной. Использование регулятора торможения позволит оптимизировать по времени торможение поперечины при подходе к нижней и ; эрхней заданным точкам реверса, повысить точность ковки, надежность работы пресса, работы и гибкость перестройки электронного нелинейного преобразователя, упростить конструкцию электро
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор торможения поперечины гидравлического пресса | 1979 |
|
SU774967A1 |
| Регулятор торможения поперечины гидравлического пресса | 1979 |
|
SU856860A1 |
| Регулятор торможения поперечиныгидРАВличЕСКОгО пРЕССА | 1979 |
|
SU821206A1 |
| Система управления гидравлическимпРЕССОМ | 1979 |
|
SU821205A1 |
| Регулятор торможения поперечины гидравлического пресса | 1978 |
|
SU727477A1 |
| Регулятор торможения поперечины гидравлического пресса | 1976 |
|
SU597574A1 |
| Система управления гидравлическимпРЕССОМ | 1979 |
|
SU821204A1 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
| Устройство для точного останова электропривода | 1985 |
|
SU1272447A1 |
| Электропривод постоянного тока | 1991 |
|
SU1815785A1 |
