( МЕХАНИЗМ ПОВОРОТА ШПИНДЕЛЬНОГО БАРАБАНА ТОКАРНОГО МНОГОШПИНДЕЛЬНОГО АВТОМАТА
дит к необходимости применения мощных пружин, имеющих большие габариты. Кроме того, для выполнения наладочных операций такие станки, кроме главного привода, обычно имеют ручной и электромеханический наладочные приводы медленного вращения распределительного вала.
Так как кривошип мальтийского механизма закреплен на распределительном валу, то наладочному вращению последнего противодействует дополни тельный тормозной момент от. усилия нагружателя (с учетом передаточного отношения и КПД передач). При больши усилиях нагружателя противодействуюаъий крутящий момент затрудняет обес печение нормальной работы как ручного, так и электромеханического наладочного привода.
Цель изобретения - увеличение разгрузочного момента.
Поставленная цель- достигается тем, что нагружатель выполнен в вид изолированной пневмокамеры с пружиной, а пневмокамера снабжена управляемым клапаном, соединяющим ее с атмосферой. При таком выполнении основная часть усилия нагружателя создается изолированной (не подключенной к магистрали ) пневмокамерой, а при наладке станка посредством управляемого клапана пневмокамера соединяется с атмосферой.
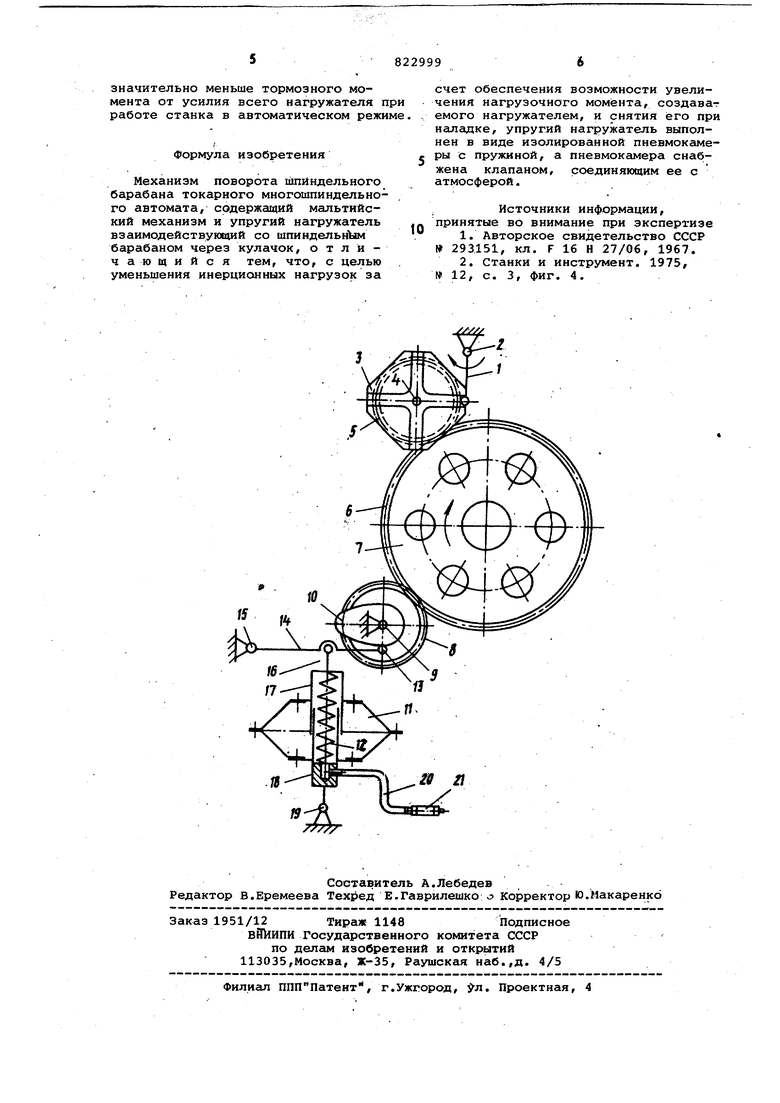
На чертеже показана схема механизма поворота шпиндельного барабана токарного многошпиндельного автомата.
Механизм поворота шпиндельного барабана токарного многошпи,ндельного автомата состоит из кривошипа 1, за.репленного на распределительном валу 2 автомата, мальтийского креста 3,,установленного с возможностью вращения на оси 4 шестерни 5, жестк связанной с мальтийским крестом 3, которая зацепляется с зубчатым венцом 6, закрепленным неподвижно на шпиндельном бараб ане- 7. С. зубчатым венцом 6 также зацепляется шестерня 8, жестко закрепленная на валу 9. Кратность отношения числа зубьев зубчатого венца 6 к числу зубьев шестерни 8 равна количеству шпинделей (позиций) шпиндельного барабана 7. На валу 9 также жестко закреплен кулачок 10 , к которому под Действием усилия пневмокамеры 11 и пружины 12 прижимается ролик 1 рычага 14. Рычаг 14 может по орачиваться вокруг оси 15, с ним также шдрнирно связан толкатель 16, жестк закрепленный на верхнем стакане 17 пневмокамеры 11. Нижний стакан 18 пневмокамеры 11 шарнирно закреплен на оси 19. Таким образом, пневмокамера 11 имеет возможность качания в плоскости рычага 14 при его повороте вокруг оси 15. Внутренняя полость пневмокамеры 11 через отверстия в нижнем стакане 18, шланг 20 и управляемый (например, с помощью электромагнита) клапан 21 может соединяться с атмосферой.
Механизм работает следующим образом.
При неподвижном шпиндельном барабане 7 (в исходном положении) управляемый клапан 21 открыт и соединяет полость пневмокамеры 11 с атмосферой, а ролик 13 рычага 14 находится на максимальном радиусе кулачка 10, пневмокамера 11 и пружина 12 сжаты.
В начале поворота шпиндельного барабана ролик кривошипа 1, вращающегося непрерывно вместе с распределительным Всшом 2, входит в паз мальтийского креста 3 и начинает поворачивать его, а через шестерню 5 и зубчатый венец 6 - и шпиндельный бараба 7. Вращение шпиндельного барабана 7 через шестерню 8 и вал 9 передается, кулачку 10. Усилие разжимающейся пружины 12, передаваемое роликом 13 на участок спуска профиля кулачка 10 создает изменяющийся по определенному закону вращающийся момент, которы передается шпиндельному барабану 7 в направлении его поворота и, благодаря этому, разгружает распределителный вал 2, а также мгшьтийский механизм и передачу от него к барабану.
В середине поворота шпиндельного барабана, когда ролик 13 рычага 14 находится на минимальном радиусе кулачка 10, а пневмокамера полностью разжата под действием пружин 12, подается сигнал на управляемый клапан 21 и он закрывается, тем самы запирая пневмокамеру 11.
Во второй части поворота шпиндельного барабанаролик 13 рычага 14 переходит с участка спуска вращающегося при этом кулачка 10 на участок подъема, начиная удаляться от центра его вращения. При этом усилие сжимающейся пневмокамеры 11 и пружины 12 сообщает шпиндельному барабану 7 крутящий момент в направлении, противоположном его повороту. Вследствие этого пред отвращается перераспределение зазоров и возникновение ударов в приводе от мальтийского механизма к шпиндельному барабану, снижаются нагрузки.
; После поворота шпиндельного барабана подается сигнгш на открытие клапана 21 и механизм дотов к следующему циклу.
При медленном нешадочном повороте шпиндельного барабана управляемый клапан 21 остается открытым все время, соединяя полость пневмокамеры 11 с атмосферой. Этим значительно снижаются нагрузки на нгшадочинй привод, так как во второй части поворота шпиндельного барабана тормозной момент от усилия.пружины 12
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм поворота шпиндельного барабана многошпиндельного токарного автомата | 1974 |
|
SU560731A1 |
| Механизм поворота шпиндельного барабана многошпиндельного токарного автомата | 1977 |
|
SU665989A1 |
| Механизм поворота шпиндельного блока многошпиндельного автомата | 1977 |
|
SU733867A1 |
| Механизм поворота шпиндельного барабана многошпиндельного токарного автомата | 1980 |
|
SU880634A1 |
| Механизм поворота шпиндельного барабана токарного многошпиндельного станка | 1983 |
|
SU1224105A1 |
| Револьверный суппорт токарно-револьверного автомата | 1975 |
|
SU566679A1 |
| Многошпиндельный токарный автомат | 1979 |
|
SU804213A1 |
| Механизм поворота шпиндельного блока многошпиндельного станка | 1991 |
|
SU1816536A1 |
| Многошпиндельный токарный автомат | 1979 |
|
SU933269A1 |
| Токарный многошпиндельный станок | 1978 |
|
SU848144A1 |
