ел
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм поворота шпиндельного барабана многошпиндельного токарного автомата | 1977 |
|
SU665989A1 |
| Механизм поворота шпиндельного барабана многошпиндельного токарного автомата | 1974 |
|
SU560731A1 |
| Механизм поворота шпиндельногобАРАбАНА ТОКАРНОгО МНОгОшпиНдЕльНОгОАВТОМАТА | 1979 |
|
SU822999A1 |
| Вертикальный многошпиндельный станок | 1990 |
|
SU1722701A1 |
| Инструментальная револьверная головка | 1987 |
|
SU1484457A1 |
| Устройство поворота многошпиндельного барабана токарного автомата | 1979 |
|
SU856661A1 |
| Многопшиндельный автомат | 1938 |
|
SU63078A1 |
| Токарный многошпиндельный станок | 1978 |
|
SU848144A1 |
| МЕХАНИЗМ ПОВОРОТА ШПИНДЕЛЬНОГО БАРАБАНА ТОКАРНОГО МНОГОШПИНДЕЛЬНОГО СТАНКА | 1967 |
|
SU198093A1 |
| Многопозиционный, многошпиндельный полуавтоматический станок карусельного типа | 1960 |
|
SU139898A1 |

Изобретение относится к станкостроению и может быть использовано в много- шпиндельных токарных автоматах. Механизм содержит мальтийский крест, поводок и передачу на зубчатый венец шпиндельного блока. Механизм снабжен электродвигателем, связанным через муфты и зубчатое колесо со шпиндельным блоком. Поворот шпиндельного блока совершается за короткое время, ему предшествует включение электродвигателя и разгон до номинальной частоты вращения ко времени трогания шпиндельного блока. После пре-- одоления инерционных масс и работы в течение половины времени поворота шпиндельного блока электродвигатель выключается. За выключением электродвигателя следует включение тормозной муфты, которая останавливает шпиндельный блок, разгружая мальтийский механизм от динамических нагрузок торможения, б ил.
Изобретение относится к станкостроению, в частности к многошпиндельным автоматическим или полуавтоматическим токарным станкам, шпиндели которых расположены в поворотном шпиндельном блоке барабанного типа.
Цель изобретения - повышение производительности устройства за счет уменьшения времени поворота шпиндельного блока.
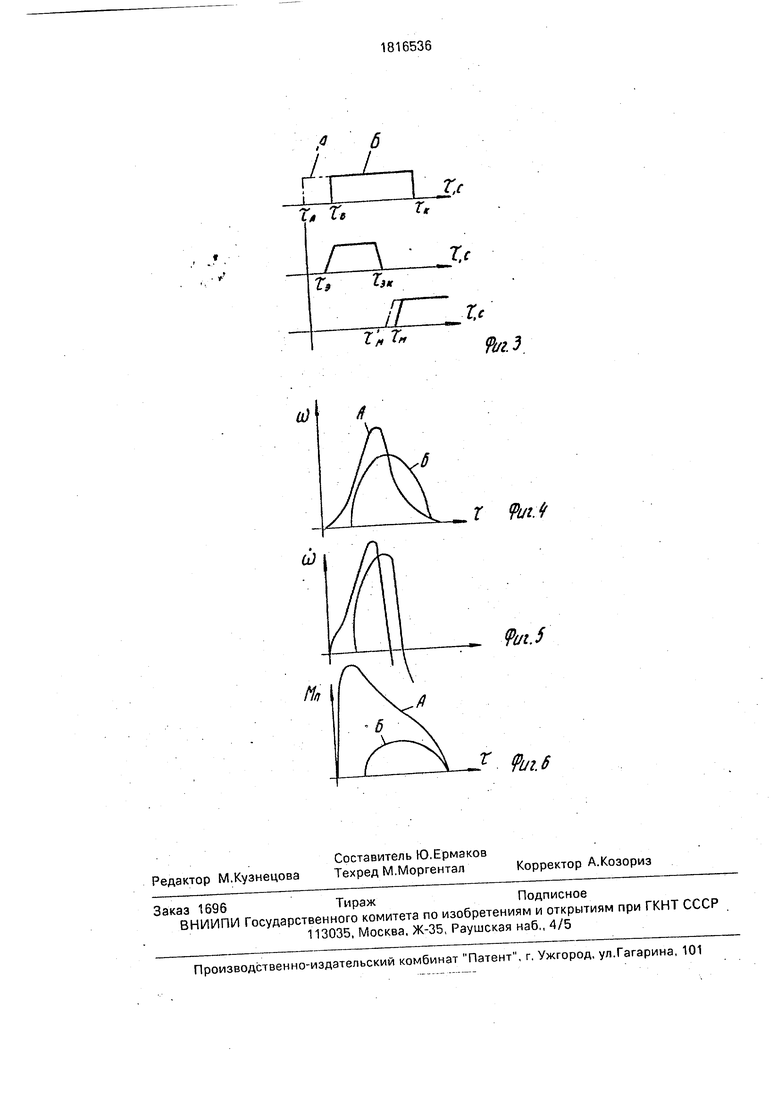
На фиг, 1 изображена кинематическая схема устройства; на фиг. 2 схематично представлена передача вращения от дополнительного привода через зубчатое колесо на зубчатый венец шпиндельного блока; на фиг.З - фрагмент циклограммы работы многошпиндельного станка; на фиг.4-6 - графики угловой скорости, ускорения шпиндельного блока и момента на поводке
мальтийского креста соответственно для обычного А и предложенного Б механизмов.
Механизм поворота шпиндельного блока содержит мальтийский механизм, состоящий из мальтийского креста 1, поводка 2, установленного на распределительном валу 3, передачи 4 на зубчатый венец 5 шпиндельного блока 6, Механизм, снабжен электродвигателем 7, связанным через фрикционную 8 и электромагнитную тор- мозную муфту 8, зубчатое колесо 10 с упомянутым зубчатым венцом 5 шпиндельного блока 6. Зубчатое колесо 10 установлена по оси станка в горизонтальной, плоскости, что исключает заклинивание зубчатой передачи зубчатого венца 5 и колеса 10 при подъеме шпиндельного блока в положение б перед
00
СХ СП GJ О
поворотом на следующую позицию (см.ф,иг.2). На распределительном валу 3 установлен конечный выключатель 11, управляющий работой тормозной муфты 9, и конечный выключатель 12, управляющий работой электродвигателя 7.
Механизм работает следующим образом.
В соответствии с циклом работы станка от распределительного вала 3 осуществляется подъем шпиндельного блока 6, включается электродвигатель 7 по команде KB 12 и совместно с поворотом шпиндельного блока 6 от мальтийского креста 1, осуществляемого от поводка 2 через передачи 4 на венец 5 шпиндельного блока 6, зубчатого колеса 10 на упомянутый зубчатый венец 5.
Поворот шпиндельного блока А от обычного механизма начинается при времени ТА и заканчивается при тк (см.фиг.З). Поворот шпиндельного блока Б с рассматриваемым механизмом совершается за более короткое время и начинается от времени ТБ. Ему предшествует включение электродвигателя привода поворота во время тэ и разгон до номинальной частоты вращения во времени ТБ трогания шпиндельного блока. Послэ преодоления инерционных масс и работы в течение половины времени поворота шпиндельного блока (тк-тв)/2 электродвигатель выключается и гасит свой маховой момент к конечному времени тэк. За выключением электродвигателя следует включение тормозной муфты при времени тм, которая останавливает шпиндельный блок, разгружая мальтийский механизм от динамических нагрузок торможения. Тормозная муфта остается включенной в течение некоторого времени тмк следующего цикла работы станка. Совместное действие шпиндельного блока с механизмом фиксации повышает жесткость последнего благодаря преднатя- гу всей системы, К моменту поворота шпиндельного блока тормозная муфта отключена. Начало включения тормозной муфты регулируется в пределах TM -TM при наладке станка с контролем потребляемой мощности электродвигателем поворота и момента на поводке мальтийского креста.
Сравнительные характеристики обычного и предложенного механизмов постро- ены во времени поворота ТА, ТБ- тк шпиндельного блока,А и Б, соответствующем одному и тому же углу рабочего хода поводка мальтийского креста. Индикаторные диаграммы угловой скорости а) показывают значительное снижение ее максимальной
величины в предложенном механизме за
счет более интенсивного приращения (фиг,4). Угловые ускорения а) построены за первую половину поворота шпиндельного блока и симметричны замедлению (фиг.5).
Момент на поводке предложенного механизма Мп в несколько раз меньше обычного механизма (фиг.6), что достигается поворотом шпиндельного блока от отдельного электродвигателя, Остаточный момент на
поводке МПБ необходим для натяга системы поворота.
Формула изобретения Механизм поворота шпиндельного блока многошпиндельного станка, содержащий
мальтийский механизм, кинематически связанный с распределительным валом и шпиндельным блоком, дополнительный привод блока с электродвигателем, управляемым от распределительного вала и кинематически связанным со шпиндельным
.блоком, отличающийся тем, что, с целью повышения производительности об- работки путем сокращения времени поворота шпиндельного блока, механизм 40 снабжен тормозной и фрикционной муфтами, установленными в кинематической цепи дополнительного привода шпиндельного блока.
fa/
fa г
Г, Г,
fl6
г,
ГЛ .ъ
т, г
JL
г; г
Ь
ЯаЭ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Заявка «РРГ №3226311, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
