Изобретение относится к автоматике и может быть использовано при создании следящих систем нормированной жесткости, преимущественно обратимых, например для манипуляторов и грузоподъемных и транспортных средств.
Известна следящая система, содержащая канал регулирования жесткости привода, включающий в себя датчик нагрузки, последовательно соединенный с функциональным преобразователем, выход которого связан с сумматором привода 1.
Наиболее близким техническим решением к предлагаемой является следящая система, содержащая последовательно соединенные измеритель рассогласования, сумматор, привод и датчик обратной связи, выход которого связан с вычитающим входом измерителя рассогласования, датчик нагрузки, соединенный с выходом привода, и функциональный преобразователь, вход которого соединен с выходом измерителя рассогласования, и позволяющая компенсировать статическую ошибку, -вызванную действие.м нагрузки на привод следящей системы 2.
Олтнако оба известные устройства увеличивают жесткость следящей системы при
возрастании нагрузки, что в конечном итоге приводит к возникновению автоколебаний и даже к поломке исполнительного механизма, если нагрузка превыщает допустимую. Подобный режим довольно часто возникает при работе очувствленного манипулятора, когда исполнительный орган касается жесткой преграды или оперирует с предельной нагрузкой. В этом случае жесткость привода манипулятора уменьшается.
Цель изобретения - расширение диапазона регулирования следящей системы.
Поставленная цель достигается тем, что следящая система содержит блок умножения первый вход которого соединен с выходом функционального преобразователя, второй вход - с выходом датчика нагрузки, а выход - со вторым входом сумматора.
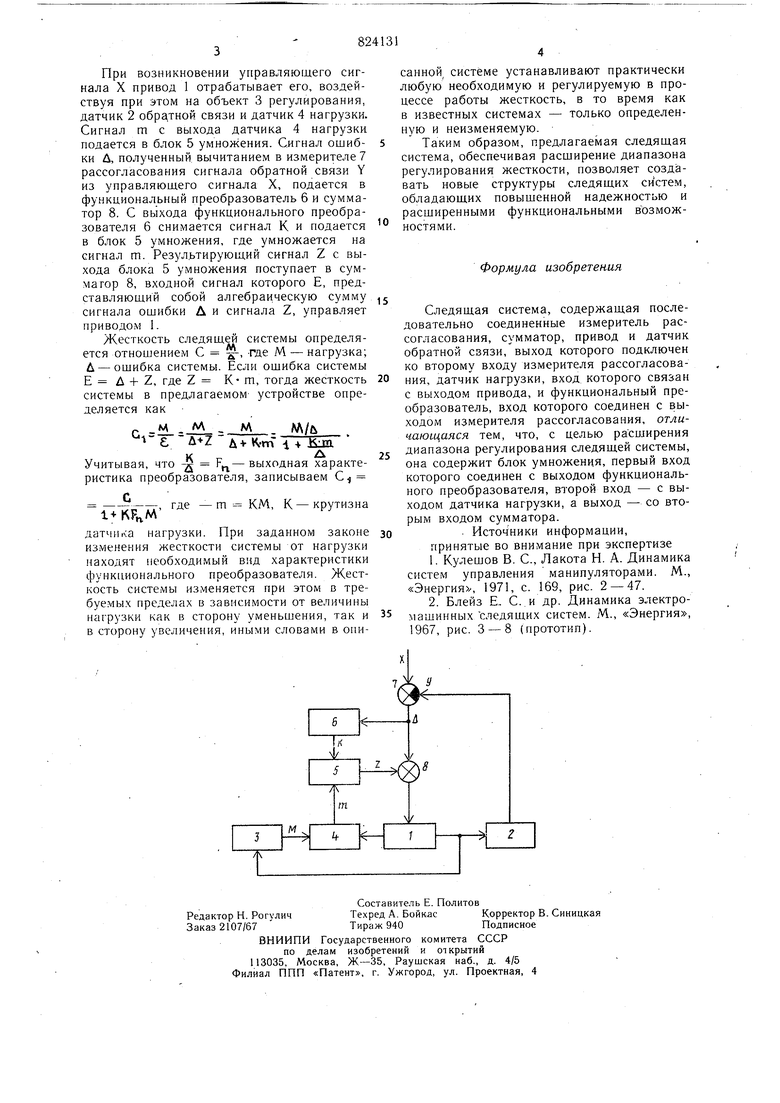
На чертеже представлена функциональная схема следяшей системы.
Она содержит привод 1, датчик 2 обратной связи, объект 3 регулирования, датчик 4 нагрузки, блок 5 умножения, функциональный преобразователь 6, измеритель 7 рассогласования и сумматор 8.
Следящая система работает следующим образом. 82 При возникновении управляющего сигнала X привод 1 отрабатывает его, воздействуя при этом на объект 3 регулирования, датчик 2 обратной связи и датчик 4 нагрузки. Сигнал m с выхода датчика 4 нагрузки подается в блок 5 умножения. Сигнал ошибки Д, полученный, вычитанием в измерителе рассогласования сигнала обратной связи Y из управляющего сигнала X, подается в функциональный преобразователь 6 и сумматор 8. С выхода функционального преобразователя 6 снимается сигнал К и подается в блок 5 умножения, где умножается на сигнал т. Результирующий сигнал Z с выхода блока 5 умножения поступает в суммагор 8, входной сигнал которого Е, представляющий собой алгебраическую сумму сигнала ощибки Д и сигнала Z, управляет приводом I. Жесткость следящей системы определяется отношением С , где М - нагрузка; Д - ошибка системы. Если ошибка системы Е Д н- Z, где Z К m, тогда жесткость системы в предлагаемом устройстве определяется как М . М М К-т -1 -IL Кгп А Учитывая, что - выходная характеристика преобразователя, записываем С /« -- гГТГ где - m КМ, К-крутизна 1+ датчика нагрузки. При заданном законе изменения жесткости системы от нагрузки находят необходимый вид характеристики функционального преобразователя. Жесткость системы изменяется при этом в требуемых пределах в зависимости от величины нагрузки как в сторону уменьшения, так и в сторону увеличения, иными словами в описанной, системе устанавливают практически любую необходимую и регулируемую в процессе работы жесткость, в то время как в известных системах - только определенную и неизменяемую. Таким образом, предлагаемая следящая система, обеспечивая расширение диапазона регулирования жесткости, позволяет создавать новые структуры следящих систем, обладающих повышенной надежностью и расширенными функциональными вЪзможностями. Формула изобретения Следящая система, содержащая последовательно соединенные измеритель рассогласования, сумматор, привод и датчик обратной связи, выход которого подключен ко второму входу измерителя рассогласования, датчик нагрузки, вход которого связан с выходом привода, и функциональный преобразователь, вход которого соединен с выходом измерителя рассогласования, отличающаяся тем, что, с целью расширения диапазона регулирования следящей системы, она содержит блок умножения, первый вход которого соединен с выходом функционального преобразователя, второй вход - с выходом датчика нагрузки, а выход - со вторым входом сумматора. . Источники информации, принятые во внимание при экспертизе 1.Кулешов В. С., Лакота Н. А. Динамика систем управления манипуляторами. М., «Энергия л 1971, с. 169, рис. 2 - 47. 2.Блейз Е. С. и др. Динамика электромашинных следящих систем. М., «Энергия, 1967, рис. 3 - 8 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипу-ляТОРОМ | 1979 |
|
SU830292A1 |
| Электрогидравлическая следящая система | 1985 |
|
SU1317189A1 |
| Цифровая следящая система | 1989 |
|
SU1797094A1 |
| Двухканальный цифроаналоговый следящий привод | 1988 |
|
SU1631517A1 |
| Силовой следящий привод | 1984 |
|
SU1228070A1 |
| Устройство для управления манипулятором | 1973 |
|
SU552184A1 |
| Система управления | 1983 |
|
SU1120283A1 |
| Следящая система двустороннего действия | 1985 |
|
SU1296404A1 |
| Самонастраивающийся следящий электропривод | 1986 |
|
SU1366992A1 |
| Электрогидравлический следящий привод | 1987 |
|
SU1530823A1 |
