1
Изобретение относится к системам автоматического управления и может найти применение при управлении объектами с переменныь4и параметрами и неконтролируемыми возмущениями.
По основному авт.св. №591821 известна система автоматического управления, содержащая модель объекта управления и последовательно соединенные первый сумматор, регулятор и второй сумматор, выход которого соединен со входом объекта управления, выход которого соединен с одним из входов первого сумматора, и последовательно соединенные третий сумматор, блок задержки, обратную модель объекта управления и четвертый сумматор вход которого соединен с выходом регулятора, а выход - через модель объекта регулирования с одним из входов третьего сумматора, другой вход которого соединен с выходом объекта управления, выход обратной модели объекта управления соединен с одним из входов второго сумматора .
Цель изобретения - расширение области устойчивости системы.
Поставленная цель достигается тем, -что в систему введено корректирующее устройство, через которое выход обратной эталонной модели соединен со вторыми входг1ми второго и четвертого сумматоров.
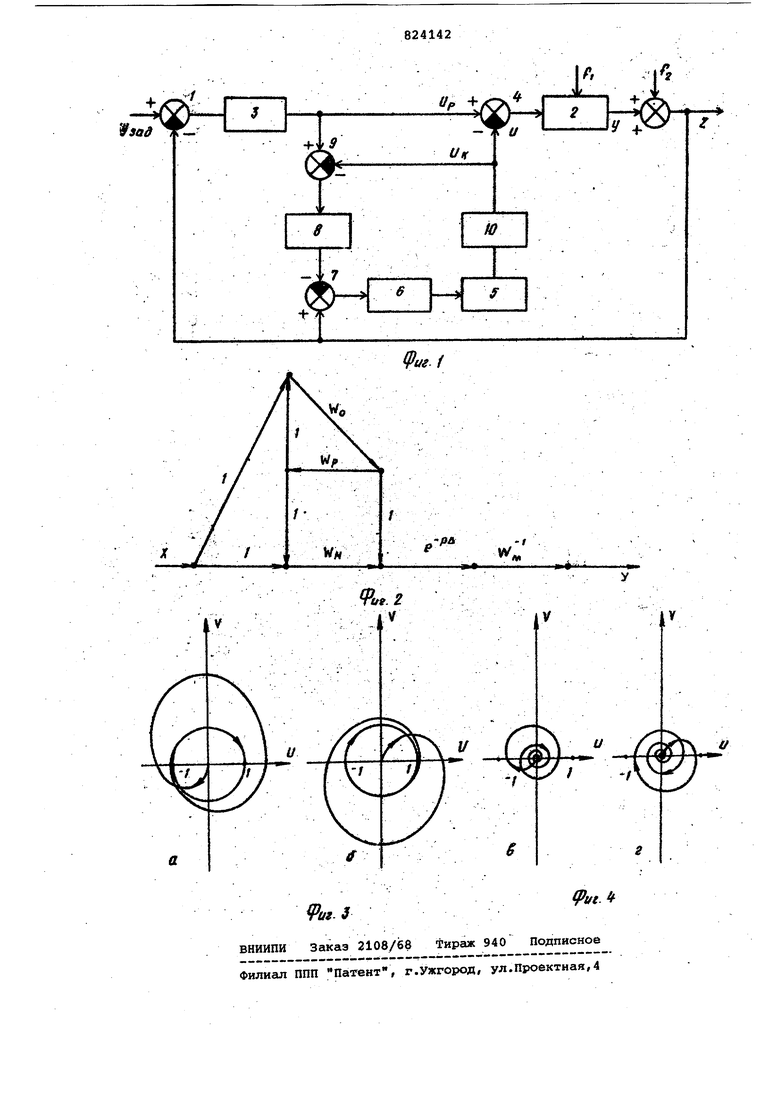
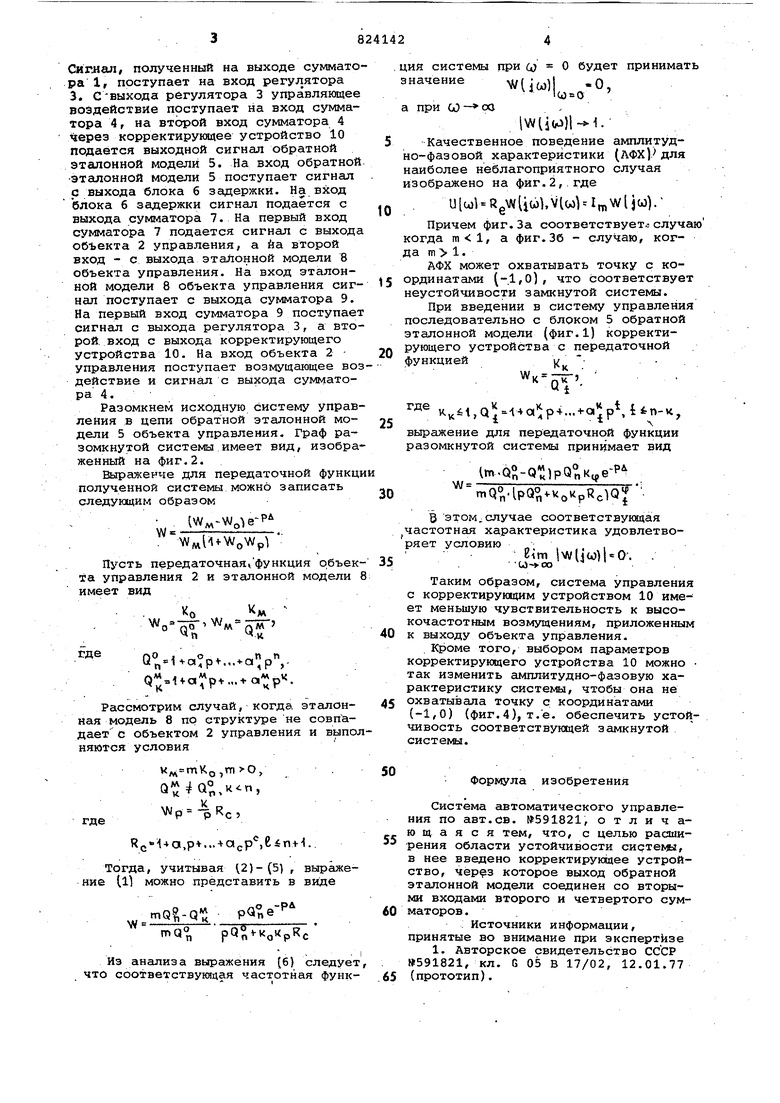
На фиг. 1 представлена блок-схемаСистемы; на фиг. 2 - -граф разомкну- той системы; на фиг. 3 и 4 - амплитудно-фазовые характеристики.
Схема содержит первый сумматор 1, объект 2 управления, регулятор 3,
0 второй сумматор 4, обратную зт алойную модель 5, блок 6 задержки, третий сумматор 7, эталонную модель 8, четвертый сумматор 9 корректирующее устройство 10, возмущающее воздействие f и fj, входное воздействие у, выходное воздействие z,А
Граф разомкнутой системы (фиг.2) содержит передаточную функцию W р регулятора 3, передаточную функцию
0 WQ объекта 2 управления, передаточную функцию W обратной модели, передаточную функцию W, корректирующего устройства 10, передаточную функцию i блока. 6 задержки, интервеш д вре5мени задержки.
Система работает следующим образом.
Задающее воздействие поступает на вход сумматора 1, на второй вход которого поступает инвертированный 0 сигнал с выхода объекта управления 2. CKTMSJif полученный на выходе суммато ра 1, поступает на вход регулятора 3. Свыхода регулятора 3 управляющее воздействие поступает на вход сумматора 4, на второй вход сумматора 4 через корректируквдее устройство 10 подается выходной сигнал обратной эталонной модели 5. На вход обратной эталонной модели 5 поступает сигнал с выхода блока б задержки. На вход блока 6 задержки сигнал подается с выхода сумматора 7. На первый вход сумматора 7 подается сигнал с выход объекта 2 управления, а йа второй вход - с выхода эталонной модели 8 объекта управления. На вход эталонной модели 8 объекта управления сиг нал поступает с выхода сумматора 9. На первый вход сумматора 9 поступае сигнал с выхода регулятора 3, а вто рой, вход с выхода корректирующего устройства 10. На вход объекта 2 управления поступает возмущающее во действие и сигнал с выхода сумматора 4. Разомкнем исходную систему управ ления в цепи обратной эталонной модели 5 объекта управления. Граф разомкнутой системы имеет вид, изобра женный на фиг.2. Выраженче для передаточной функц полученной системы можнб записать следующим образом iW Wple-P . w iltWoWp Пусть передаточная функция объек та управления 2 и эталонной модели имеет вид QVba:p..,..a;p,...-.. Рассмотрим случай, когда эталонная модель 8 по структуре не совпадает с объектом 2 управления и выпо няются условия , ,,
где ,p...,p,.
Тогда, учитывая (2)-(5) , выражение (11 можно представить в виде
V mQ«
Из анализа выражения (б) следует, что соответствующая частотная функСистема автоматического управления по авт.св. №591821, о т л и ч аю щ а я с я тем, что, с целью расширения области устойчивости сиртемы, в нее введено корректирующее устройство, которое выход обратной эталонной модели соединен со вторыми входами второго и четвертого сумматоров.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР №591821, кл. G 05 в 17/02, 12.01.77 (прототип). ия системы при (о О будет принимать ) -О, начение при СО - СХ1 , lwUoJ). Качественное поведениеамплитудно-фазовой характеристики(ЛФХ) для наиболее неблагоприятногослучая изображено на фиг.2,.где )VRgWliw),VlwbI WlJQ)/ Причем фиг.За соответствует случаю когда , а фиг. 36 - случаю, кога m 1. АФХ может охватывать точку с координатами (-1,0), что соответствует неустойчивости замкнутой системы. При введении в систему управления последовательно с блоком 5 обратной эталонной модели (фиг.1) корректирующего устройства с передаточной функцией К ,Q5-140(ip4.,., Un-K, t-Т выражение для передаточной функции разомкнутой системы принимает вид l№.Q°-QtlpQ. mq°.lpQ «o«pRc1Qj В этом.случае соответствукнца я частотная характеристика удовлетворяет условию .. Wl4W) 1 0. . Таким образом, система управления с корректирующим устройством 10 имеет меньшую чувствительность к высокочастотным возмущениям, приложенным к выходу объекта управления. , Кроме того, выбором параметров корректирующего устройства 10 можно так изменить амплитудно-фазовую характеристику системы, чтобы она не охватывала точку с координатами (-1,0) (фиг.4), т.е. обеспечить устойчивость соответствующей замкнутой системы. Формула изобретения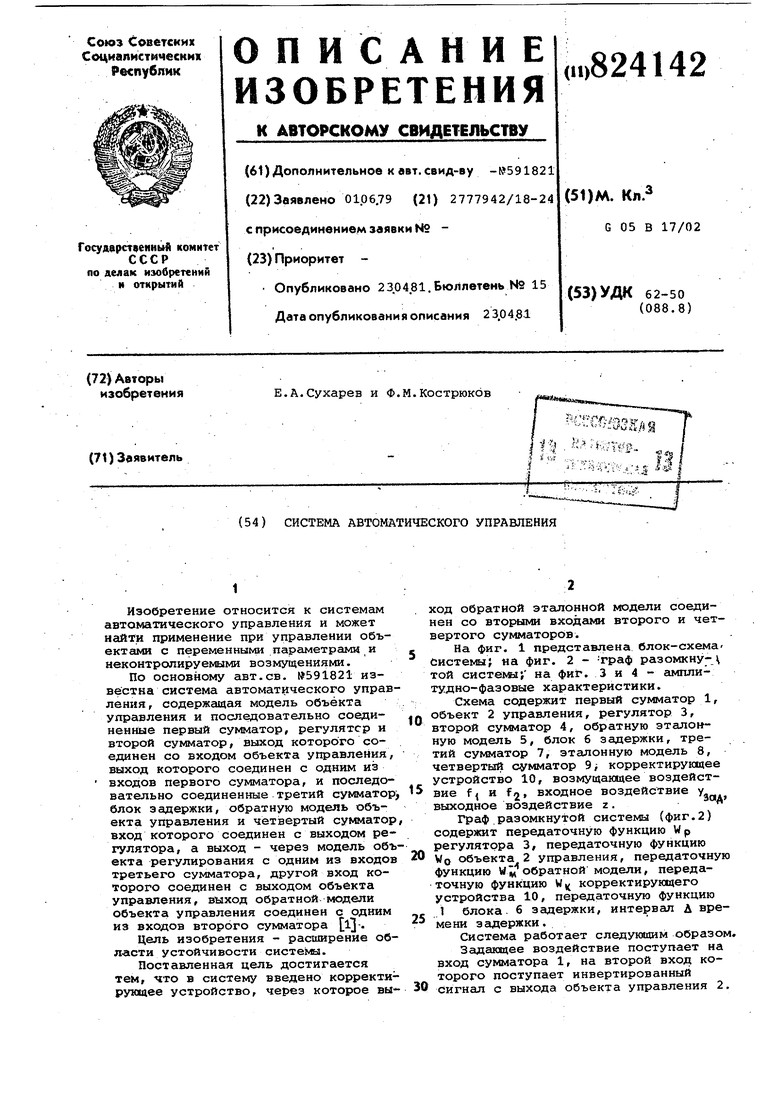
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления | 1977 |
|
SU591821A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Система управления | 1979 |
|
SU832529A1 |
| Система автоматического управления | 1982 |
|
SU1113781A1 |
| Система автоматического управления | 1982 |
|
SU1113780A2 |
| Система автоматического управления | 1980 |
|
SU985761A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| Система управления для объектов с запаздыванием | 1979 |
|
SU860002A1 |