(54) СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления | 1980 |
|
SU985761A1 |
| Система автоматического управления | 1979 |
|
SU824142A2 |
| Система управления для объектов с запаздыванием | 1979 |
|
SU860002A1 |
| Система автоматического управления | 1982 |
|
SU1113780A2 |
| Система автоматического управления | 1982 |
|
SU1113781A1 |
| Система управления | 1979 |
|
SU832529A1 |
| Адаптивная система управления | 1986 |
|
SU1399700A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Адаптивная система автоматического управления | 1987 |
|
SU1441351A1 |
1
Изобретение относится к автоматике и может найти применение при проектировании систем автоматического управления различными объектами с переменными параметрами и неконтролируемыми возмущениями на входе.
Известны системы автоматического управления для нестационарных объектов с неконтролируемыми возмущениями на входе, содержащие основной контур управления, который включает измеритель сигнала рассогласования, на- первый вход которого подается сигнал задания, а на второй - инвертированный сигнал с выхода объекта, регулятор, вход которого соединен с выходом измерителя рассогласования, вьйсод регулятора соединен с первым входом сумматора, а выход сумматора соединен со входом объекта управления, на который воздействует также неконтролируемое возмущение, и дополнительный контур управления , Ёйключакяций модель-эталон, передатбчная функция которой соответствует номинальйой передато ной функции основного системы управления, на :вход/которой подается сигнсш задания, второй сумматор, первый вход которого соединен «5 мходс 4 модели-эталона, а на второй конец
поступает инвертированный сигнал с выхода объекта управления, и корректирующее устройство, вход которого соединен с выходом второго сумматора, а выход - со вторым входом сумматора основного контура системы }.
Системга автоматического управления такого типа обладают низкой чувствительностью к изменениям параметров объекта управления, однако не всегда обеспечивают необходимую степень независимости процесса управления от воздействугацих на объект возмущений.
Наиболее близкой по технической . сущности к предложенной.является система автоматического управления, содержащая модель объекта управления и последовательно соединенные первый
сумматор, регулятор и второй сумматор, выход которого соединенный со входом объекта управления, выход которого соединен с одним из -входов первого сумматора 2j.
Недостатке этой системы автоматического управления является низкая помехоустойчивость прн возмущениях входе объекта управления.
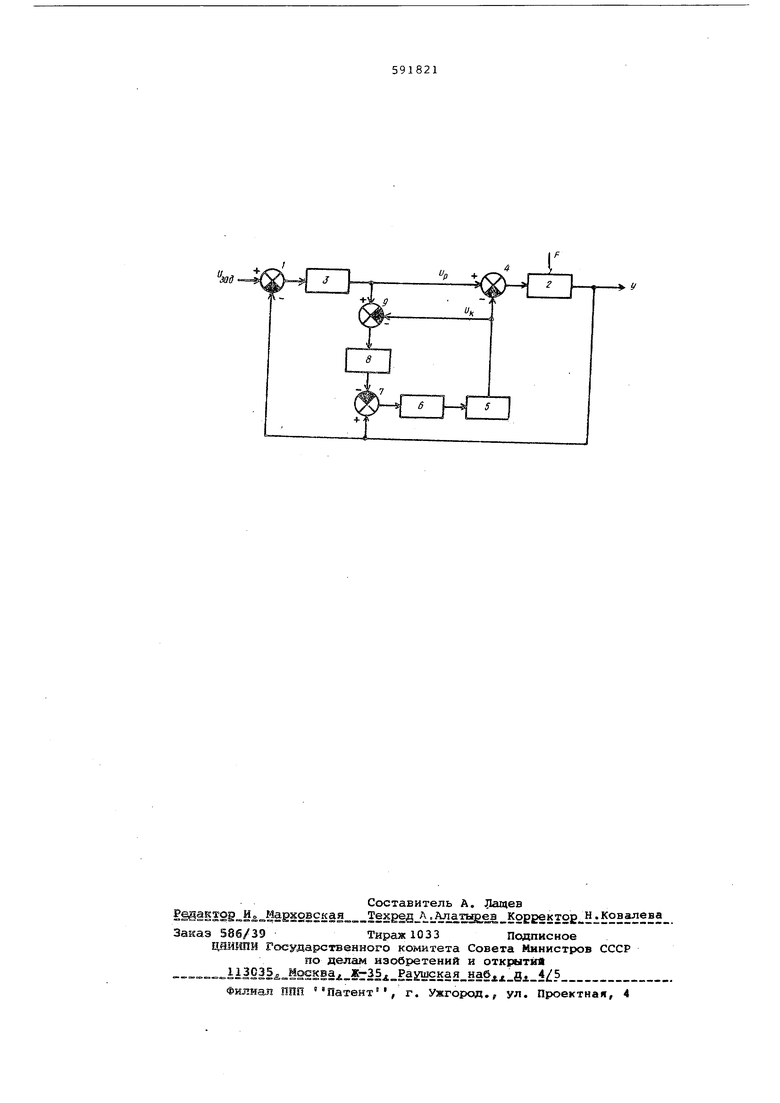
Цель изобр етения - увеличение помехоустойчивости систеки автоматического управления - достигается тем, что система содержит последовательно соединенные третий сумматор, блок задержки, обратную модель объекта управления ичетвертвлй сумматор, вход которого соединен с выходом регулятора, а выход - через модель объекта регулирования с одним из входов третьего сумматора, другой вход которого соединен с выходом объекта управления, выход обратной модели объекта управления соединен с одним из входов второго сумматора. ЭуЬ позволяет увеличить помехоустойчивость системы. На чертеже представлена функциональная схема предлагаемая системы автоматического управления нестационарным объектом, Задаклцее воздействие .. поступает на вход сумматора Г, на второй вход которого поступает инвертированный сигнал с выхода объекта управления 2, сигнал, полученный на выходе сумматора 1, поступает на вход регулятора 3. С выхода регулятора 3 управлякнцее воздействие Up поступает на вход сумматора 4, на второй вход сумматора 4 подается инвертированный сигнал управления If с выхода обратной эталонной модели объекта управления 5, на вход обратной эталонной модели 5, поступает сигнал с выхода блока задержки на вход блока задержки 6 сигнал пода ется с выхода cj/мматора 7, на первый вход сумматора 7 подается сигнал с в хода объекта управления 2, а на второй вход сумматора 7 поступает инвертированный сигнал с выхода эталон ной модели объекта управления 8, на вход эталонной модели сигнгш посту пает с сумматора 9,;на первый вхрД сумматора 9 поступаетсигнал с выход регулятора 3, а на второй вход сумма тора 9 подается инвертированный сигнал с выхода обратной эталонной моде ли 5, на вход объекта поступает возмущающее воздействие и сигнал с выхо да сумматора 4, Обозначив передаточную функцию ре гулятора 3 WP , передаточную функцию объекта управления 2 W , передаточн функцию эталонной модели c8w , а обратной эталонной модели 5 - WjJ, и блока задержки Е . , где д - интервал задержки, то выражение для выходного сигнала системы можно запи сать следую1цим образ,ом WoWpV Q Wo(4-e-P)F i Wo pKi-e- Vwo{w;J Wp) {-р Так как при А-..0,(1-е-) о, выбирая значение интервала заде4 ки л в блоке задержки достаточно алым () ; можно обеспечить ыполнение условия ((i-f-)l K{w +w iri1 (2) Тогда, пренебрегая первым членом знаменателе выражения (1), можно аписать ...,(-г-J-)F i Wo()rT Умножая численность на знаменатель ыражения (3) на W,ц и сокращая Wg получим, V MVA/pVaaA WMa-t-P)F . Г ) Из выражения (4) видно, что выходой сигнал системы практически не ависит от параметров объекта, а ередаточная функция системы по канау управления близка к эталонной. роме того можно выбрать такое д , то значение 1 W(i-r)r I )e-p I ри ограниченном внешнем возмущении F удет меньше любого малого, наперед заданного С . Таким образом предлагаемая система автоматического управения обладает инвариантностью до к внешним возмущениям. Формула изобретения Система автоматического управления, содержащая модель объекта управления и последовательно соединенные первый сумматор, регулятор и второй сулвлатор, выход которого соединен со ВХОДСФ1 объекта управления, выход которого соединен с одним из входов первого сумматора, отличающийся тем, что, с целью увеличения помехоустойчивости системы, она содержит посл0дб ваФельно соединенные третий сумма(э1з(;:. задержки, обратную модель; обйек Фа- уп 1 авления и четsepTbdt вход которого соединен с йыходОм ре $ лягора;;, а выход через модель объекта регу ЛЯ1 ования с одним из входов третьего cV fiviaTopa, другой вход которого соединен с выходом объекта управления, выход обратной модели объекта управления соедииен с одним из входов второго сумматора. . Источники инфо1; 1ации, пйинятые во внимание при экспертизе) 1.Хпександровсквй,В.Н. и др. Адаптивные системы автоматического управления сложными технологическими процессами. М., Энергия, 1973, с. 193-194. 2.Чинаев П.К. Самонастраиваияцие системы. Киев, Наукова Думка 1969, с. 401.
У
