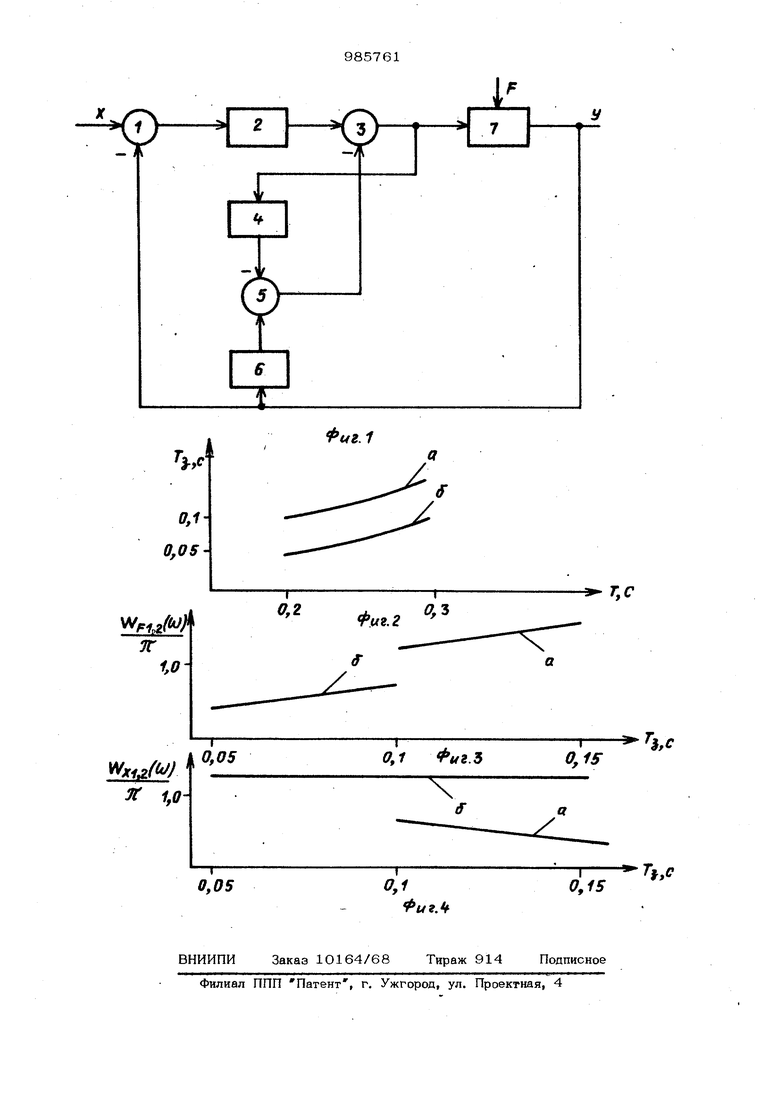
(54) СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ Изобретение относится к автоматике и может быть использовано при конструировании систем автоматического управления (САУ) различными объектами с переменными параметрами и неконтролируемыми возмущениями. Известна САУ с пассивной настройкой содержащая модель объекта управления (ОУ) и последовательно соединенные пер вый сумматор, ОУ, второй сумматор, блок обратной связи, выход которого сое динен со вторым входом первого суммато ра, вход модели ОУ соединен с первым входом первого сумматора, а выход с вт рым входом второго сумматора С 1 . Недостатком этой САУ является низ- кая помехоустойчивость при возмушекиях на входе объекта управления. Наиболее близкой к предлагаемой является система автоматического управл& ния, содержащая первый блок сравнения, регулятор, второй блок сравнения, объект управления и обратную модель объекта управления и последовательно соединенные блок задержки и третий блок сра&нения С 2 . Недостатком известной системы управления является низкая точность. Цель изобретения - повышение точности системы. Поставленная цель достигается тем, что в системе выход обратной модели объекта управления соединен с вторым входом третьего блока сравнения, выходом подключенного к второму входу второго блока сравнения, выход которого соединен с входом блока з ержкиг На фиг. 1 показана функциональная схема предлагаемой САУ; на фиг. 2 зависимость времени задержки от постоянной времени объекта из условий устойчивости САУ (кривая а - для прототипа, б - для предлагаемой САУ, на фиг. 3 - зависимость эквивалентной полосы пропускания САУ по возмущающему воздействию от велич1шы времени за: Ds |держ1Ш для прототипа (а) и для предлагаемой САУ (б); на фиг. 4 зависимостэквивалентной полосы пропускания САУ по задающему воздействию от величины времени, задержки для прототипа (а) и для предлагаемой САУ (б). Система содержит первый блок 1 сра нения, регулятор 2, второй блок 3 сравнения, блок 4 задержкитретий блок 5 сразвнения, обратная модрль ОУ 6, объек 7 управления. Регулятор 2 соединен своим входом выходом блока сравнения, а выходом с первым входом блока 3 сравнения, выход которого соединен с взсодами объ екта 7 управления и блока 4 задержки, выход объекта,7 управления соединен с входами обратной модели ОУ 6 и блока 1 сравнения, выход сумматора 5 соединен с вторым входом бпоу& 3 сравнения на вход объекта 7 .управления приложено возмущающее воздействие F . Выходная координата предлагаемой САУ определяется в соответствии с вь ражениемI-pTj Р1р)п(Р)- Wp(p)Wp((p ()Wp((p) прв: р(ртм((р(р ((p) где F(p) - возмущающее воздействие на входе ОУ; WO(P) передаточная функция ОУ| р 3 -передаточная функция блок задержки; SMp{p) - передаточная функция регу лятора; - задающее воздействие на входе САУ; J(p) - передаточная функция обр ной модели ОУ. Предположим, что заданы спектрал ные плотности задающего 5х() и возмущающего 5 p(U)) воздействий, тогда согласно вьфажений (2) средние знач ния квадрата Выходной координаты, коФррые для известной САУ
-1л1КО- Г
д
5(w;+:
F, (
dw ,
по возмущающему и задающему воздействиям H3BecTHOif и предлагаемой САУ и учетом (9)
имеют вид Та
J
(0)
р()
-а
м 4 предлагаемой САУ Й К (/w)|2s (w;+ (4; (jw; амплитудно-частотные характеристики по з дающему воздействию прототипа и предлагает мой САУ соответственйо; P (jvw - алтлитудно-частотные характеристики по воэмущакмдему воддейсо ВИЮ прототипа и предлагаемой САУ соответ ственно. известной САУ Wp(P)W(p) (, е Wp(p)W(F,) W( {р) - е Wp{p)W(p) выражения (2) Wp(p)W(F) Р) Wplp)W(pJ ,W(p)l-e )W(p} чностные характеристики систем ределяют их эквивалентными полопропускания по заданному и возмуму воздействиям. Поэтому сравния оценка известной и предлагаемой роизводится по их эквивалентным м Пропускания пустим, что Wplp) . П-6Т,р+т;р-TjPе ja 2 2 YZ + fiTgp+Tjp .p вивалентные полосы пропусканий , . зт, ji. («; MV3T« TM-T, J, (12) х,)э-4Т2W- . (Э) Лз 3 4Т„ На фиг. 3 и 4 согласно (1О-13) представлены зависимости эквивалентны полос пропусБввия прототвпа в предлаг мой САУ от величины времени заддажк Tj при ,2 с. Из условий устойчивости при ,2 0,8 для прототипа ,1 с и для предлагае1 шй САУ ,05 с, а при ,3 с, О,8 для прототипа Т О,15 с и для предлагаемой САУ Та ОД с. Анализируя проведенные на фиг. 3 и 4 зависимости, можно сделать следу щие выводы, Сост авляюшая выходного сигнала пр лагаемой САУ по заданному воздействи по сравнению с известной практически не искажается блоком задержки. Точность предлагаемой системы по аадаю це1ъ(у воздействию на 25-7О% вы ше известной. Влияние возмушакяпего воздействия на выходную координату предлагаемой САУ на 30-50% меньше, чему извест ной.. В предлагаемой САУ ПО ср нению известной отсутствует один сумматор и эталонная модель ОУ, вследствие чего упрощается конструкция предлагаемой САУ по сравневиоо с прототипом. Устройство работает следующим . Сигнал с выхода объекта 7 управле ния подается на вход обратной модели ОУ 6, а инвертированный на вход блока 1, на другой вход которого подаетс задающее воздействие X. Суммарный сигнал с блока 1 подается на регулято 2. Сигнал с регулятора 2 подается на первый вход блока 3, на второй вход , подается инвертированный сигнал с блок 5. С выхода сумматора 3 сигнал посту вход ОУ 7 и блок 4 задержки. 61 Задержанный блоком 4 сигнал с обратным знаком поступает на первый вход блока 5, на второй вход которого поступает сигнал с обратной модели объекта 6 управления , , Конструкпия предлагаемого устройства основана на использовании известных элементов и технических трудностей для реализации не представляет. Оценку реализуемости и эффективности предлагаемого устройства проводят аналитическим методом и методом математического моделирования на АВМ типа АВК-2(3). При моделировании на АВМ ) регулятор реализуют усилителем с коэффициентом, равным 1, объект управления - колебательным звеном. Б блоке задержки иопользуют приближенное разложение в ряд Паде второго порядка вида w,H: iviii l«,-3P 12+бГзр-м|р Источником случайных возмущающих воздействий со спектральной плотностью Pf-2.,5 /Гц является гейератор белого шума. Итак, применение предлагаемой систе- мы увеличивает ее точность на О% Формула изобретения Система автоматического управления, содержащая первый блок сравнения, р&гулятор, второй блок сравнения, объект управления и обратную модель объекта управления, и последовательно соединенные блок задержки и третий блок сравнения, отличающаяся тем, что, с целью повышения точности системы, в ней выход офатной модели объекта управления соединен с. вторым входом треть&го блока сравнения, выходом подключенного к второму входу второго блока сравнения, выход которого соединен с входом блока задержки. .Источники информации, принятые во внимание при экспертизе 1.Чаки Ф. Современная теория упра&Ления. М., Мир, 1975, с. 254. 2.Авторское свидетельство СССР № 591821, кл. Q 05 В 13/О4, 1979 (прототип).
-I

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления | 1979 |
|
SU832529A1 |
| Система автоматического управления | 1977 |
|
SU591821A1 |
| Система управления для объектов с запаздыванием | 1982 |
|
SU1051502A1 |
| Система автоматического управления | 1979 |
|
SU824142A2 |
| Устройство для компенсации запаздывания | 1982 |
|
SU1108390A1 |
| Самонастраивающаяся по входному сигналу система управления | 1987 |
|
SU1529176A1 |
| Устройство для компенсации запаздывания | 1985 |
|
SU1325403A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Регулятор с моделью объекта | 1983 |
|
SU1080118A1 |
| Система автоматического управления | 1982 |
|
SU1113781A1 |
yf
0,10,05
0,2
п:
,С
Фиг.г
