(54) СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗдаВАНИЕМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления для объектов с запаздыванием | 1985 |
|
SU1280568A1 |
| Система автоматического управления | 1982 |
|
SU1113780A2 |
| Система автоматического управления | 1986 |
|
SU1409971A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Адаптивный регулятор с регулируемой обратной связью | 1985 |
|
SU1287104A1 |
| Адаптивная система автоматического управления для нестационарных объектов с запаздыванием | 1986 |
|
SU1451644A1 |
| Адаптивная система автоматического управления | 1987 |
|
SU1441351A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
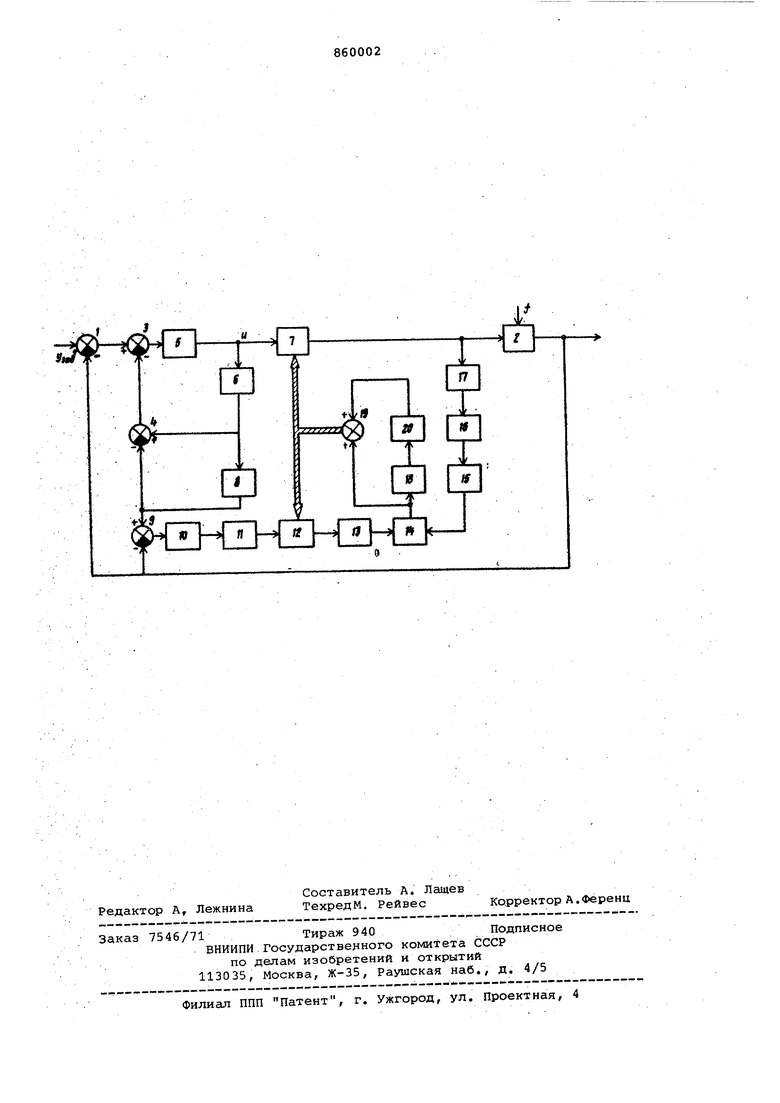
Изобретение относится к автоматике и может найти применение при проектировании систем автоматического управления объектами с запаздыванием. Наиболее близкой к предлагаемой является система автоматического управления объектами .с запазгилванием содержащая последовательно соединен ные первый.сумматор, второй сумматор регулятор, модель объекта без запаздывания, первый блок задержки, третий сумматор, вьрсод которого соединен со вторым входом второго сумматора, а второй вход - с выходом модели объекта без запаздывания, выход регулятора через первый усилитель соединен со входом объекта с запаздыванием, выход которого соединен со вторым входом первого сумматора 1. Однако известные системы автоматического управления обладают высокой чувствительностью к изменениям параметров объекта, что ведет к снижению качества управления и понижению устой чивости в условиях дрейфа параметров объекта, а также при неточном знании его параметров., полученных в результате идентификации. Цель изобретения - снижение чувствительности системы автоматического управления к изменениям коэффициента усиления объекта управления и повышение устойчивости в условиях воздействия на него неконтролируемых возмущений . Указанная цель достигается тем, что система содержит последовательно соединенные четвертый сумматор, второй йлок задержки, обратную модель объекта без запаздывания, второй усилитель, первый интегратор, блок деления, дифференциатор, третий усилитель и пятый сумматор и последовательно соединенные третий блок задержки, второй интегратор и четвертый усилитель, выход которого соединен со вторым входом блока деления, второй вход пятого сумматора соединен со входом дифференциатора, а выход со вторыми входакм первого и второго усилителей, первый вход четвертого сумматора соединен с выходом первого блока задержки, второй вход - с выходом объекта с запаздыванием, вход которого соединен со входом третьего блока задержки. На чертеже представлена функциональнс1Я схема предлагаемой систег автоматического управления объектом с запаздыванием. Задающее воздействие .Узад поступае на вход первого сумматора 1, на втор вход которого подается инвертированный сигнал с выхода объекта 2 с запаздьтт арием. Сигнал с выхода первого сумматора 1 поступает на вход второго сумматора 3, на второй вход которого подается инвертированный сигнал с выхода третьего сумматора 4. Сигна полученный на выходе второго сумматора 3, поступает на вход регулятора 5, с выхода которого сигн.ал проходит на вход модели объекта б без запаздывания и на вход первого усилителя 7. С выхода модели объекта 6 без запаздывания сигнал подается на первый вход третьего сумматора 4 и- на вход блока 8 задержки, с выхода которого он поступает на первый вход четвертого сумматора .9 и с обратным знаком на второй вход третьего сумматора 4. Н второй вход четвертого сумматора 9 подается инвертированный сигнал с выхода объекта 2 управления. Сигнал полученный на выходе четвертого сумматора 9, поступает на вход блок 10 задержки, с выхода которого он дается на вход обратной модели 11 объекта без запаздывания, с выхода обратной модели 11 объекта без запа дывания - на информационный вход вт рого усилителя 12, а оттуда - на вход интегратора 13 блока. С выхода первого интегратора 13. сигнал пода ется на первый вход блока 14 делени на второй вход которого поступает 1си1нал с выхода четвертого усилител 15. На вход последнего подается сиг нал с выхода второго интегратора 16 на вход которого поступает сигнал с выхода второго блока 17 задержки. На вход блока 17 временной задержки подается сигнал с выхода первого уси лителя 7. С выхода усилителя 7 сигнал дополнительно подается на вход объекта 2 управления, на вход последнего поступает также возмущающее воздействие f . С выхода блока 14 деления сигнал, равный отношению выход ного сигнала первого интегратора 13 к выходному сигналу усилителя 15, поступает на вход дифференциатора 1 И на первый вход пятого сумматора 1 С выхода дифференциатора 18 сигнал Подается на усилитель 20, с выхода которого сигнал поступает на второй вход пятого сумматора 19. С выхода с viaTopa 19 сигнал подается на параметри веские входы второго усилителя 12 и дйрвого усилителя 7. Обозначим передаточную функцию объекта 2 с запаздыванием через Wo(j)) , передаточную функцию модели объекта 6 без запаздывания - через Wj(.p), передаточную Функцию второго блока 10 временной задержки - , S-ef ,15-е , передаточную функ, -цию о.братной модели 11 объекта без запаздывания - . Пусть WQW у где К - коэффициент усиления объекта; ,; - полином п-го порядка от р, пусть также ) тогда ) 4Si21, где Kj;,- перестраиваемый коэффициент усиления усилителей 7 и 12Запишем выражение для изображения выходного сигнала объекта в виде К tKF Q Л% / .где V и F - изображения по Лапласу управления U и возмущения f. Для изображения выходного сигнала модели выражение имеет вид Y . (2) й,(р) . тогда для изображения сигнала ошибки на выходе сумматора -9 имеем (Клл- ККс ) -KF для изображения выходного сигнала обратной модели 11 объекта управления(Км- i;CKc). , у 1-/. (4) Перейдем далее к оригиналам и запишем выражение для сигнала на выходе усилителя 12 KW- ККс V.. --S t-T-u) f (t-u). На выходе интегратора 13, осуществляющего интегрирование на скользящем интервале времени Т, имеем - Г К Kg (©-r)d & t-л-Т-Т f(0)de.(6) t-u-T Рассмотрим случай, когда изменения коэффициента усиления объекта значительно более низкочастотны по сравнению с внешним воздействием f, т.е. Т ,, где Tj и Т - времена спадания автокорреляционных функций внешнего возмущения и коэффициента усиления объекта соответственно. В этих условиях самонастройку коэффициентов усиления К усилителей 12 и 7 имеет смысл проводить, исходя из условия минимизации функционала от величины К -КК -Тогда, очевидно, коэффициент усиления К должон изменяться так, чтобы произведение КК(- оставалось по возможности постоянным и равным коэффициенту усиления модели К„. При таком режиме самонастройки переменная, в реальных условиях величина КК.. должна быть значительно более низкочастотной по сравнению с К и KC в отдельности. С учетом описанных ранее сообрал ений, а также при условии, что время интегрирования Т удовлетворяет неравенству T ;Т Т , () в выражении (б ) величины КК и и можно вынести из-под знака интеграла, Зс1менив их на среднеинтеграпьные значения, т.е. t-д I -4- r(K;v4-KKc)d &J-42- U(0-tr)d -Ь-Т-л t-T-u w 1 Д If I/ - J de J f (e)d & (8 i-T-ii t-Т-д Интеграл от случайного эргодического процесса с нулевым математическим ожиданием, каковым обычно является внешнее возмущение, на интервале, удовлетворяющем условию (7) можно приравнять нулю, т.е. /f ede ж О, .(9) тогда выражение для сигнала на выход интегратора 13 имеет вид t-д -- у Г ()der| и (e-COd.6. (1 Сигнал на выходе усилителя 15 с учетом того, что его коэффициент усиления равен 1/Кдд , а время интегрирования интегратора 16, также как и у интегратора 13 равно Т, будет равен t-u L J U(e-r)d&, (11) i-A-l тогда на выходе блока 14 деления g Y J ( Kc)d0. На вых.оде дифференциатора 18 выраже ние для сигнала после замены переме ных t - л {JU и использования теоремы Лейбница-Ньютона можно привести к - J ()du; t du) te-T K(U)-T) кс()- T)-K(U))KC(UU) Далее с учетом того, что коэффициен усиления усилителя 20 численно раве Т+Д, нетрудно записать выражение дл алгоритма самонастройки K..(t) 1-i-g(t -д)4 аким образом, изобретение позволяет увеличит-ь устойчивость системы управления, сн-изить чувствительность при действии на систему в условиях неконтролируемых помех. Формула изобретения Система управления для объектов с запазрь1ванием, содержащая последовательно соединенные первый сумматор, второй сумматор, регулятор, модель объекта без запаздывания, первый блок задержки, третий сумматор, выход которого соединен со вторым входом второго сумматора, а второй вход - с выходом модели объекта без запаздывания, выход регулятора через первый усилитель соединен со входом объекта с запаздыванием, выход которого соединен со вторым входом первого сумматора, отличающаяся тем, что, с целью повышения устойчивости системы в условиях н-еконтролируемь1х помех, она содержит последовательно соединенные четвертый- сумматор, второй блок задержки, обратную модель объекта без запаздывания, второй усилитель, первый интегратор, блок деления, дифференциатор, третий усилитель и пятый сумматор и последовательно соединенные третий блок задержки, второй интегратор и четвертый усилитель, выход которого соединен со вторым входом блока деления, второй вход пятого сумматора соединен со входом дифференциатора, а выход - со вторыми взводами первого и второго усилителей, первый вход четвертого сумматора соединен с выходом первого блока задержки, второй вход - с выходом объекта с запаздыванием, вход которого соединен со входом третьего блока задержки. Источники информации, принятые во внимание при экспертизе 1. Догановский С.А, Иванов В.А. УстрЪйства запаздывания и их применение в автоматических системах. М., Машиностроение, 1966, с. 267 (прототип),
