Изобретение относится к электротехнике и может быть использовано для автоматизированного управления механизмом поворота конвертора.
Известно устройство для регулирования скорости нескольких параллельно работающих электродвигателей, содержащих датчики скорости каждого электродвигателя, регулятоЕ« скорости, задатчик скорости, сумматоры 1,
Недостатком данного устройства является низкие регулировочные свойства, что объясняется отсутствием в устройстве обратной связи по электродвигателей.
Наиболее близким по техническому решению к изобретению является многадвигательный электропривод содержащий электродвигатели, связанные с общей нагрузкой, датчики тока и частоты вращения по числу электродвигателей, каналы регулирования кгикдого электродвигателя, содержащие последовательно соединенные первый сумматор, регулятор частоты вргидения, второй сумматор, регулято якорного тока, источник питания, выходы датчиков частоты вращения и тока каждого электродвигателя подключены соответственно к первому и второму сумматорам канала регулирования своего электродвигателя, за.датчик частоты вращения, подключенный к первым сумматорам каждого какала регулирования, регуляторы вы1равнивания нагрузок и третьи сумматоры по числу канадов регулирования 2.
10
Недостатком данного устройства является относительно невысокое быстродействие системы выравнивания нагрузки приводных электродвигателей. Это обусловлено двумя причинами:
15 во-первых, сигнал на выходе;датчика якорного тока запаздывает по сравнению с моментом появления нагрузки на валу двигателя, а во-вторых, выравнивание нагрузки происходит воз20действием на вход регуляторов частоты вращения, следовательно, время .отработки этого воздействия определяется быстродействием контура регулирования частоты вращения. Как из25вестно, в двухконтурной системе под- чиненного регулирования изменение якорного тока электродвигателя, а, следовательно, и изменение сигнала на выходе датчика якорного тока (да30 пренебречь инерционностью
самого датчика тока) запаздывает при изменении момента нагрузки на валу электродвигателя на время, зависящее от величины электромагнитной постоянной времени якорной цепи электродвигателя. В то же время в известной Системе контур регулирования частоты вращения двигателя, как внешний контур, является наименее быстродействующим. Все это и приводит к тому, что при изменении нагрузки на валу одного из приводных электродвигателей выравнивание нагрузок между электродвигателями происходит с запаздыванием, что снижает точность работы известного многодвигательного электропривода (точность распределения нагрузки между приводными электродвигателями) .
Цель изобретения - повышение точности выравнивания нагрузок между электродвигателями.
Поставленная цель достигается тем, что выход регулятора частоты вращения калсдого электродвигателя соединен с первым входом соответствующего третьего сумматора, второй вход которого соединен с выходом регулятора частоты вращения последующего электродвигателя, каждый третий сумматор подключен выходом через регулятор выравнивания нагрузки к второму сумматору соответствующего канала регулирования.
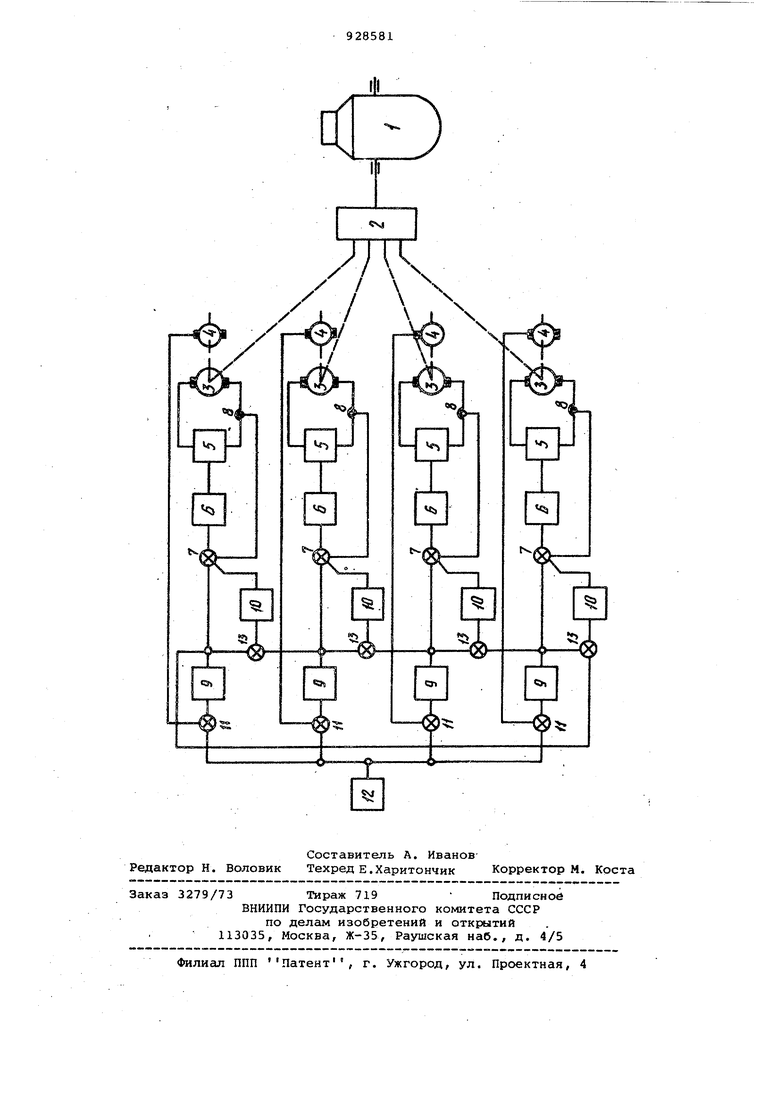
На чертеже представлена блок-схема многодвигательного электропривода.
Многодвигательный электропривод содержит механизм 1 поворота корпуса конвертора, соединенный механичес ки через редуктор 2 с приводными двигателями 3 постоянного тока и датчика 4 частоты вращения. Якори
3электродвигателей подключены к регулируемым индивидуальным источникам 5 питания, в качестве которлх могут быть использованы ионные или тиристорные преобразователи с системами фазового управления или другие устройства. Входы источников 5 питания присоединены к выходам соответствующих регуляторов 6 якорного тока, вход каждого регулятора
б якорного тока соединен через сумматор 7 с выходом датчика 8 тока, с выходом регулятора 9 частоты вращения и с выходом регулятора 10 выравнивания нагрузки. Вход каждого ре1 улятора 9 частоты вращения соедияен через сумматор 11 с датчиком
4частоты вращения и с выходом общего задатчика 12 частоты вращения. Дхо|Д каждого регулятора 10 выравнивания нагрузки подключен через сумматор 13 к выходу регулятора 9 частоты вращения одного электродвигателя 3, к входу регулятора б якорного тока которого подключен
через сумматор 7 выход данного регулятора 10 выравнивания н&грузки и к выходу регулятора 9 частоты вращения второго электродвигателя 3. Таким образом, реализуется кольцевая схема соединения регуляторов 10 выравнивания нагрузки приводных электродвигателей.
Устройство работает следующим образом.
На входе регуляторов 10 выравнивания нагрузки происходит сравнение выходных сигналов регуляторов 9 частоты вращения, а управляющий сигнал выравнивания нагрузки корректирует величину нагрузки электродвигат глей 3, воздействуя на входы регуляторов б якорного тока электродвигателей 3, т.е. воздействуя тем caivftjM через быстродействующий контур регулирования тока.
При изменении величины статического момента на валу одного из приводных электродвигателей 3 прежде всего происходит изменение его частоты вращения. Это приводит к изменению выходного сигнала датчика 4 частоты вращения и к изменению сигнала на выходе регулятора 9 частоты вращения, что и приводит.к появлению разностного сигнала на входе регулятора 10 выравнивания нагру зки и соответствующего сигнала на Btixoде этого регулятора, который воздействует на регулятор б тока, и тем самым корректирует распределение нагрузки между всеми п жводными электродвигателями. Таким образом, в схеме происходит непрерывное сравнение выходных сигналов регуляторов 9 частоты вращения двух соседних по схеме электродвигателей 3, причем выходной сигнал регулятора 9 частоты вращения каждого электродвигателя 3 непрерывно сравнивается с выходными сигналами регуляторов 9 частоты вращения двух соседних по схеме электродвигателей 3 - предыдущего и последующего. Выравнивание нагрузки всех приводных электродвигателей 3 происходит по кольцевой схеме.
Использование изобретения позволяет за счет коррекции задания якорного тока электродвигателей многодвигательного электропривода обеспечить равномерное распределение нагрузки между электродвигателями во всех режимах работы механизма и обеспечить работоспособность многодвигательного электропривода при выходе из строя любого из входящих в его состав приводных электродвигателей.
Ф&рмула изобретения
Многодвигательный электропривод, 5 содержащий электродвигатели, свяэанн1яе с общей .нагрузкой, датчики тока и частоты вращения по числу электродвигателейf каналы регулирования каждого электродвигателя, содержащие последовательно соединенные первый сумматор, регулятор частоты вращения, второй сумматор, регулятор якорного тока, источник питания, выходы датчиков частоты вращения и тока каждого электродвигателя подключены соответственно.к первому и второму сумматорам канала регулиро(вания своего электродвигателя, эадатчик частоты вращения, подключенный к суш1аторам каждого канала регулирования, регулятос выравнивания нагрузок и третьи сумматоры по числу каналов регулирования, отличающийся тем, что,, с цепью повышения точности выравни
вания нагрузок между электродвигатё - лями, выход регулятора, частоты вращения каждого электродвигателя соединен с лертам входсмх соответствующего третьего сумматора, второй вход
которого соединен с выходом рехулятора частоты вращения последу П4егр электродвигателя, каждый третий сумматор подключен выходом через регулятор выравнивания нагрузки к второму cyNMaTopy соответствующего канала регулирования.
Источники инфррмащии, принятые во внимание пря экспертизе I. Заявка Ф анции 2249480, кл. Н 02 Р 5/46, 1975.
2. Авторское свидетельство СССР по заявке 2475760/07, кл. Н 02 Р 5/50, 16.10,79.

| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Многодвигательный электропривод | 1980 |
|
SU983961A1 |
| Многодвигательный электропривод | 1977 |
|
SU828354A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| Электропривод с выравниванием нагрузок | 1984 |
|
SU1179515A1 |
| Способ автоматического распределения нагрузок в многодвигательном электроприводе прокатного стана | 1987 |
|
SU1511839A1 |
| Способ автоматического управления многодвигательным электроприводом технологического пресса | 1983 |
|
SU1119153A1 |
| МНОГОДВИГАТЕЛЬНОЕ ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ (ВАРИАНТЫ) | 2012 |
|
RU2513360C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД МНОГОКРАТНОГО ПРЯМОТОЧНОГО ВОЛОЧИЛЬНОГО СТАНА | 1997 |
|
RU2158469C2 |