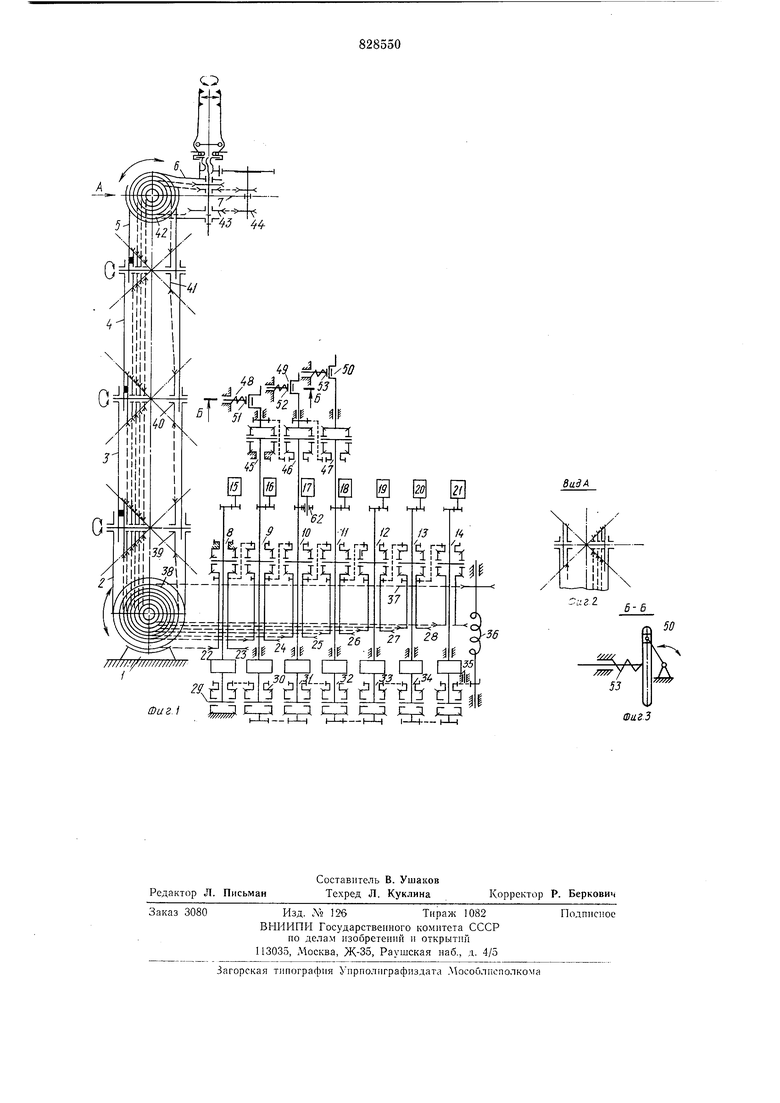
установлены дифференциалы 45-47 уравновешивающего неханнзма. Входы этих днффереициалои связаны с индивидуальными двигателями 16-18. Уравиовешивающий мехаиизн имеет также синусные мехаиизмы 48-50, осиащешшш пружннами 51-53 и связанные с выходами дифференциалов 45-47. Один выход днфференциала 45 связан с основанием, а аналогичиые выходы дифференциалов 46 и 47 кинематическн связаны с соседними дифференциалами. На втором выходе диффереициала 47 устаиовлеиа ирограммио-уиравляемая муфта 54. Индивидуальный двигатель 18 связан с цеиью нрнвода через программно-уиравляемую муфту 55, а двигатель 19 - через муфту 56.
Между валами индивидуальных двигателей 15 и 19 нриводов звеньев 2 н 6 с вертикальными осями иоворота установлена донолиительиая кинематическая цепь 57, нанример, в виде системы зубчатых колес.
Механнческая рука работает следующим образом.
При вращении двигателей 15-21 ио сигналам от нрограммного устройства (на фиг. ие ноказано) движение иередается на комненсирую1ций механизм, а с него передачам 22-28, которые осуществляют соответствующие ирограммиые неремещения звеньев 2-7. Кроме того, движение иоступает иа сумматоры-дифференциалы 29-35, которые должиым образом суммируют углы новорота двигателей и обеснечивают вращение торсиоиа 36 без его раскрутки, поддерживая заданное натяжение в кинематической цеии с номощью тросовой ветви 37. При любой коифигурации руки уравиовещивающей механизм, состоящий из дифференциалов 45-47 и синусных механизмов 48-50, с номощью пружин 51, 52 и 53 комиенсируют вес звеиьев 3-6.
Дифференциалы 45-47 суммируют углы новорота предыдущих звеиьев. В частности, выходной вал дифференциала 47 иоворачивается на угол, равный сумме углов поворотов звеиьев 3-5. Для того чтобы звено 6 совершало плоско-параллельное движение в горизонтальной илоскоети, необходимо включить муфты 54 и 55 в положение мехаиизма, когда звено 6 будет находиться в горизонтальной плоскости. При включении этих муфт двигатель 18 отключается от нрнвода и число степеней свободы мехаиизма уменьщится на 1, затем включают муфту 56, которая отключает от цеии двигатель 19 и связ 1вает ириводиые валы звеньев 2 и 6 с вертикальными осями поворота донолнительной кинематической цепью 57 с нередаточным отнощеиием, равным минус 1.
В результате механизм руки лишается еще одной степени свободы, а угловое положение звена 6 в горизонтальной плоскости стабилизируется за счет введения жестких кинематических связей.
Формула изобретения
Механическая рука по ав. св. № 708623, отличающаяся тем, что, с целью унрощения систехмы управления руки, она снабжена донолиительной кинематической цепью, связывающей валы индивидуальных двигателей, осуществляющих перемещение звеньев относительно шарниров с вертикальными осями, н программно-управляемой муфтой, установленной между одй1им из этих индивидуальных двигателей и элементом дополнитель)1ой кинематической цепи.
Источники информации, принятые во внимание нри экспертизе 1. Авторское свидетельство СССР по заявке Л 2567517/25-08, кл. В 25 J 1/00, 1978. . ЖЖЖ
Фиг-i , Ы Щ Ь.ад
50
ФигЗ /т-у 
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука | 1978 |
|
SU828551A2 |
| Механическая рука | 1978 |
|
SU708623A1 |
| Механическая рука | 1978 |
|
SU699746A1 |
| Механическая рука | 1978 |
|
SU708624A1 |
| Механическая рука | 1980 |
|
SU1006206A2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕТРА С БОРТА ДВИЖУЩЕГОСЯ КОРАБЛЯ | 1972 |
|
SU328390A1 |
| Механическая рука с программным управлением | 1980 |
|
SU1000269A1 |
| Механическая рука | 1978 |
|
SU699747A1 |
| Механическая рука | 1980 |
|
SU946917A1 |
| Механическая рука | 1980 |
|
SU901044A1 |