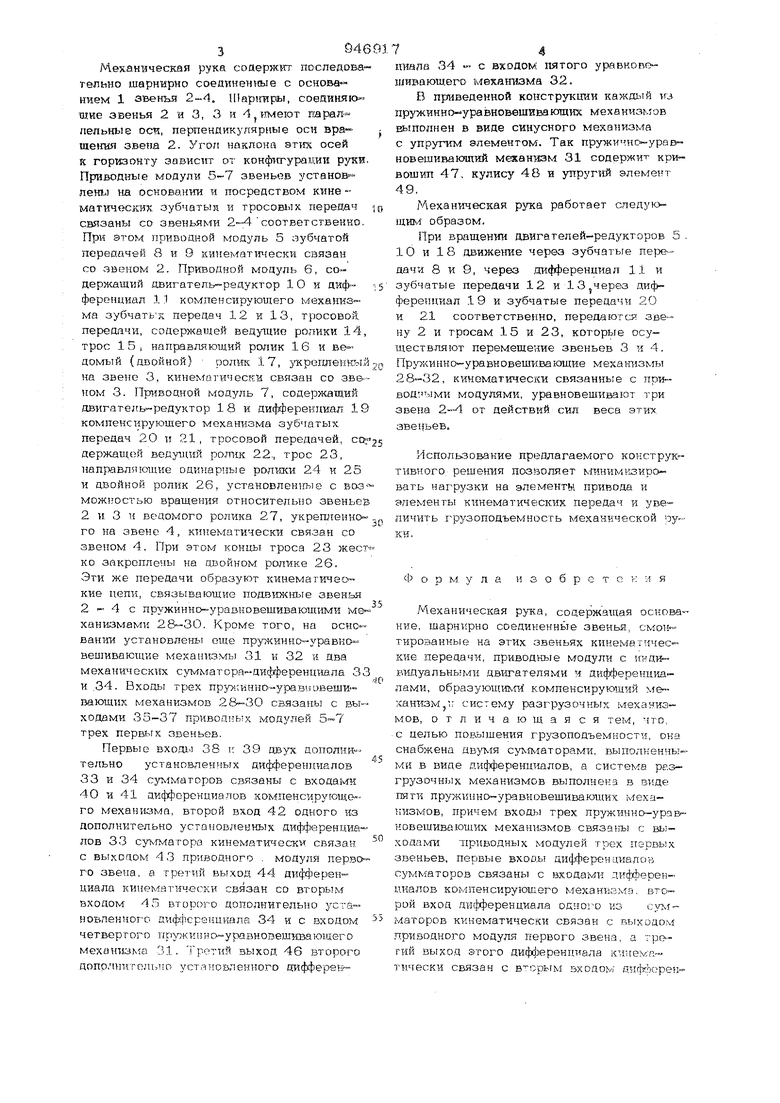
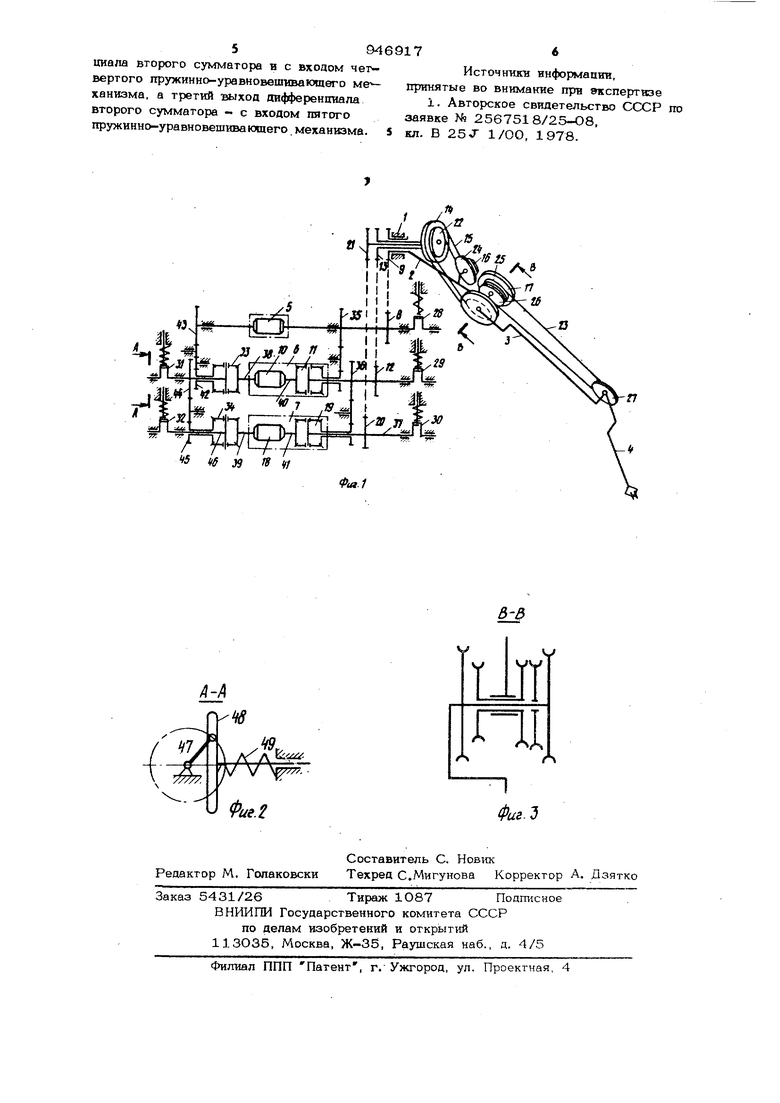
Изобретение относится к машинострое нию и может быть использовано в манипуляторах и робототехнических устройствах. Известна механическая рука, содер жащая основание, шарнирно соединенные звенья, смонтированные на этих звеньях кинематические передачи, приводные модули с индивидуальными двигателями и дифференциалами, образующими компенсируюший механизм, и систему разгрузоч ных механизмов ij. В известной конструкции механической руки уравновешиваются не все стати ческие моменты, а только цепочка после довательно соединенных звеньев, оси которых имеют всегда горизонтальное поло жение, что существенно снижает грузоподъемность руки. Цель изобретения - устранение указанного недостатка, т. е. повышение гру подъемности. Указанная цель достигается тем, что механическая рука снабжена двумя сумматорами. выполненными в виде дифференциалов, а система разгрузочных механизмов выполнена в виде пяти пружинно-уравновешивающих механизмов, причем входы трех пружинно-уравновешивающих механизмов связаны с выходами приводных модулей трех первых звеньев, первые входы дифференциалов сумматоров связаны с вхоаакга дифференциалов компенсирующего механизма, второй вход дифференциала одного из сумматоров кинематически связан с выходом приводного модуля первого звена, а третий выход этого дифференциала кинематически связан со вторым входом дифференциала.второго су гматора и со входом четвертого пружинно-уравновешивающего мехпнизма, а третий выход дифференциала второго су 1маторп - со входом .пятого пружииноуравновешиЕюющего механизма. Па фиг. 1 1 3обрпжена кинематическая схема механической руки; на фиг. 2 - сочение А-А па фиг. 1; на фит . 3 - сочоичр B-D на . 1. 3946 Механическая рука содерж1гг последова тельно шарнирно соединенные с основа нием 1 звенья 2-4. lliapirapbi, соединяю щие звенья 2 и 3, 3 и .тме1от гшраппепьные осн, перпендикупяряые оси вращет«1 звена 2. Угол наклони этих осей к горизонту зависит от конфтпгурации руки Приводные модули 5-7 звеньев установ лены iia основании и посредством кине матичесггих зубчатый и Tpocom ix передач связаны со звеньями 2-4соответственно. При этом приводной модуль 5 зубчатой передачей 8 и 9 кинематическл с зязан со звеном 2. Приводной модуль 6, садеряшщий двигатель-редуктор 10 и дт1фференциал 11 компенсирующего механизма зубчатьк передач 12 и 13, тросово:; передачи, содержащей ведущие ропики 14 трос 15 i направляющий ролик 16 и домый (двойной) ролик 17, укрепленны на звене 3, кинематически связан со зв& ном 3. Приводной модуль 7, содержащий двигатель-редуктор 18 и дифференциал 19 компенсирующего механизма зубчатых передач 20 и 21, тросовой передачей, со держащей ведущий рол1-1;к 22., трос 23, направляющие одитгарные ролики 24 и 25 и двойной ролик 26, установленгдае с воз можностью вращения относительно звенье 2 VI 3 м ведомого ролика 27, укрепленное го на звене 4, кинематически связан со звеном 4. При этом концы троса 23 жес ко закреплены на двойном ролике 26. Эти же передачи образуют кивемагичеокие цепи, связывающие подвижные звенья 2 - 4 с пружинно-уравновещивающими ме ханизмами 28-30. Кроме того, на оснсванш установлены етце пружинно-уравновешивающие геханизмы 31 и 32 и два механических сук-тматора-дифференниала 3 и .34. Входы трех пружинно-уравшвешивеющих механизмов 28-30 связаны с выходами 35-37 приводнЬх модулей трех первых звеньев. Первые входы 38 ti 39 двух дополни- 1 тельно установленных дифференмиалов 33 и 34 сумматоров связаны с входами 40 и 41 дифференциалов компенси.рующе-го механизма, второй вход 42 одного из дополнительно установленных дифференциалов 33 сук-тматора кинематичес-ки связан с вы сСДом 43 приводного . модуля перво го звена, а третий выход 44 дифференциала кинематически связан со вторым входом 45 второго дополнительно уста- но&ленного дифсрсраыпиала 34 и с входом четвертого пружинно- уравнозешивающего механизма 31. Третий выход 46 второго допо,1Н1ггольио уст,-г овленного циффере : 4цнала 34 - с входом пятого уравновешивающего механизма 32 „ В приведенной конструкции кажшл1й из пружинно-уравновешивающих механизмов выполнен в виде синусного механизма с упругим элементом. Так пружично-уравновешивающий механизм 31 содержи кривошип 47. кулису 48 и упругий элемент 49, Механическая рука работает следую,mHhi образом. При вращении двигателей-редукторов 5 . 10 и 18 движение через зубчатые передачи 8 и 9, через .ди4х{)ерендиал 11 и зубчатые передачи 12 и 13,через дифференциал 19 и зубчатые передачи 2О и 21 соответственно, передаются звену 2 и тросам 15 и 23, которые осуществляют перемещение звеньев 3 и 4. npvoKHHHо уравновешивающие механизмы 28-32, кинематически связанны-е с привод ыми модулями, уравновешивают три звена 2-А от действий сил веса этих, звеньев. Использование предлагаемого конструктивного решения позволяет миним1;зиро- вать нагрузки на элементы привода и элементы кинематических передач и увеличить грузоподъемность механической руки. ормула изобретения Механическая рука, содержащая основание, шарнирно соединенные звенья, смонтированные на этих звеньях кинематические передачи, приводные модули с индивидуальньми двигателями и дифференциалами, образующщ-гй компенсирующий механизм,; систему разгрузочных механизмов, отличающаяся тем, что, с целью поьыщения грузоподъемности, она снабжена двуктя сукл-гаторами, выполненными в виде дифференшилов, а система разгрузочных механизмов выполнена в пяти пружинно-уравновещиваюи(их механизмов, причем входы трех пружинно-уравновещивающих механизмов связа{1Ы с вь ходами приводных модулей трех первых звеньев, первые вхоо-ы дифференциалов сумматоров связаны с входами .дифференциалов компенсирующего механизма, второй вход дифференциала одног-о кз сумматоров кинематически связан с выходом приводного модуля первого звена, а третий выход этого дифференциала кинекс.а- тически связан с входом дис}йорен
5946917
циала второго сумматора и с входом чет-Источнтогн информации,
вертого пружинно-уравновешивающего ме принятые во внимание при экспертизе ханизма, а третий выход янфферентшла1. Авторское свидетельство СССР по
второго сумматора с входом пятогозаявке № 256751 8/25-О8,
пружинно-уравновешиваюшего механизма. 5 кл. В 25 Г 1/00, 1978.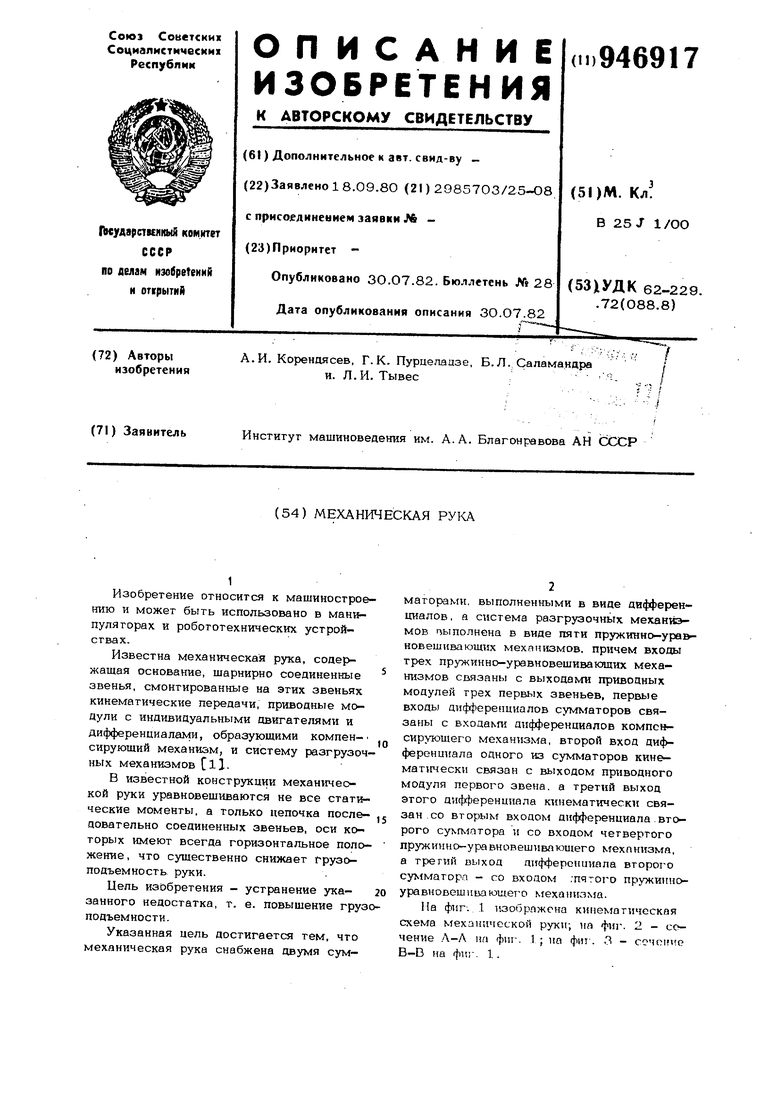
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука | 1980 |
|
SU998111A1 |
| Механическая рука с программным управлением | 1980 |
|
SU1000269A1 |
| Механическая рука | 1980 |
|
SU901044A1 |
| Механическая рука | 1978 |
|
SU699747A1 |
| Механическая рука | 1978 |
|
SU699746A1 |
| Механическая рука | 1978 |
|
SU828551A2 |
| Рука манипулятора | 1983 |
|
SU1117204A1 |
| МЕХАНИЗМ КОТОВСКОВА БЛОКИРОВКИ ДИФФЕРЕНЦИАЛОВ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2221949C1 |
| Механическая рука | 1978 |
|
SU828550A1 |
| Механическая рука | 1978 |
|
SU708623A1 |
