(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОВДЕНЙЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ MAUMHbt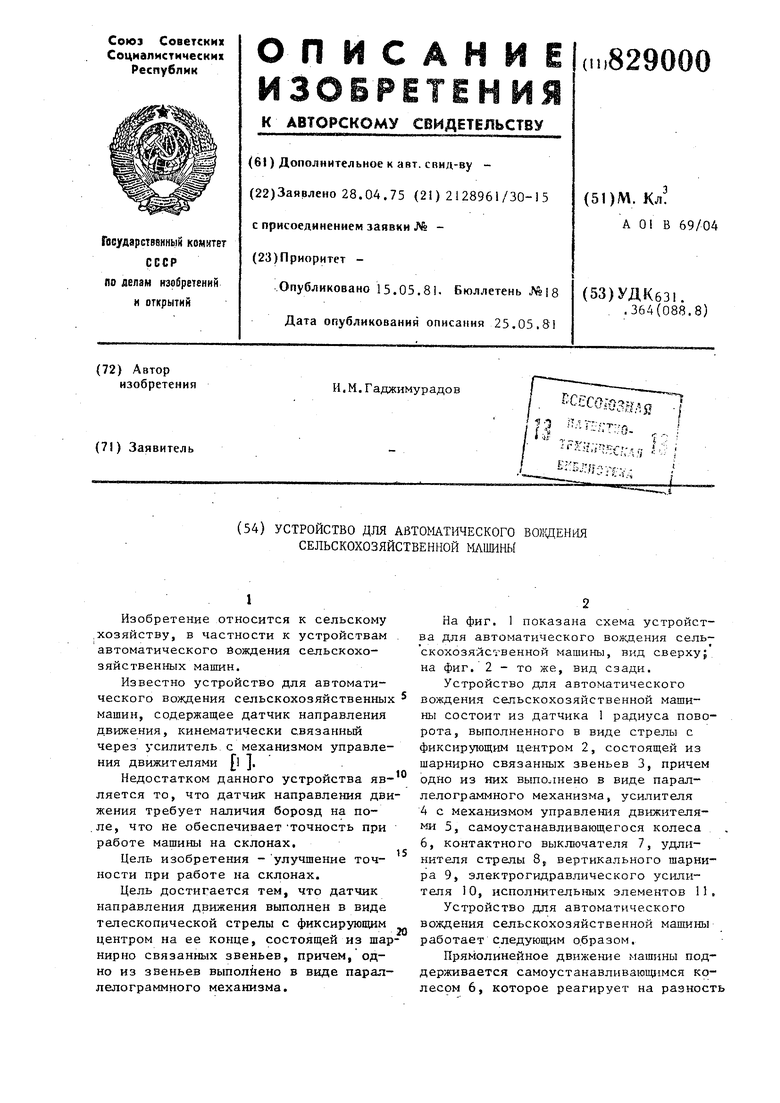

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ ПОЧВЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2086084C1 |
| Устройство для автоматического вождения сельскохозяйственной машины | 1982 |
|
SU1142018A1 |
| СПОСОБ УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫМ АГРЕГАТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2023360C1 |
| УСТРОЙСТВО КОРРЕКЦИИ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА ПОПЕРЕК СКЛОНА | 2001 |
|
RU2195097C1 |
| Самоходная машина | 1987 |
|
SU1731657A1 |
| Способ управления мобильным агророботом | 1986 |
|
SU1393334A1 |
| Способ управления мобильным агрегатом и устройство для его осуществления | 1988 |
|
SU1808233A1 |
| Транспортное средство Исина | 1985 |
|
SU1294646A1 |
| Транспортное средство для работы на склонах | 1988 |
|
SU1516383A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА УНИВЕРСАЛА | 2014 |
|
RU2577746C2 |
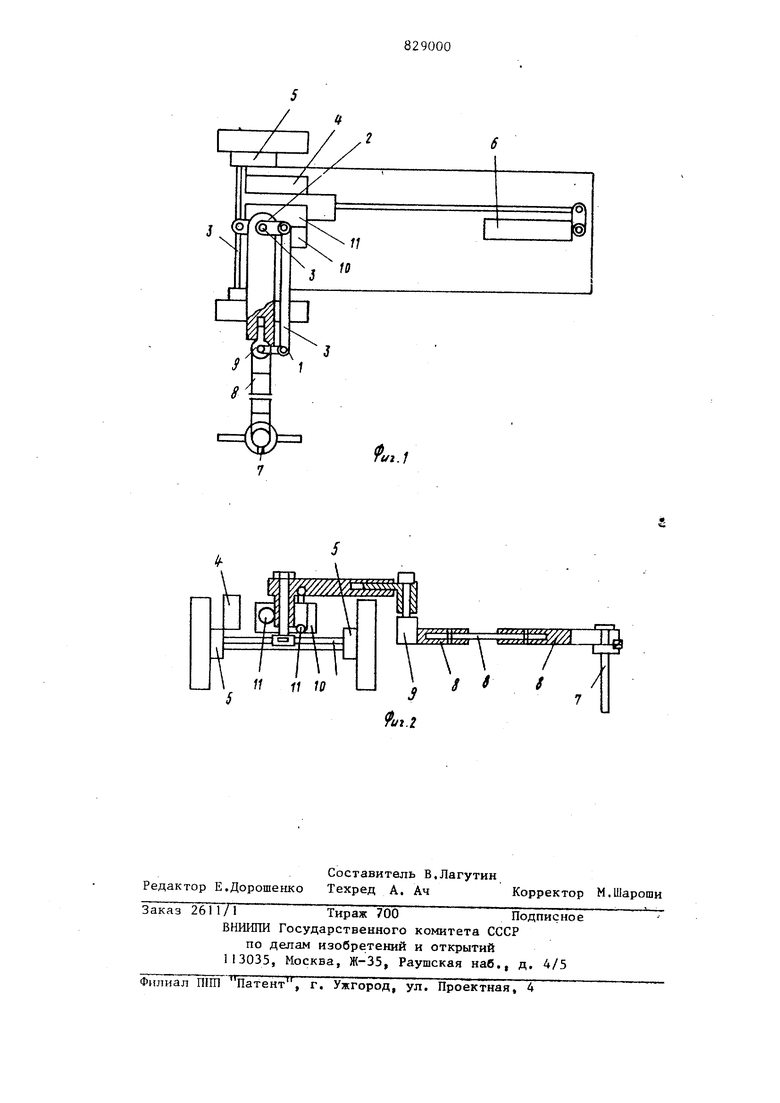
Изобретение относится к сельскому .хозяйству, в частности к устройствам автоматического вождения сельскохозяйственных машин. Известно устройство для автоматического вождения сельскохозяйственных машин, содержащее датчик направления движения, кинематически связанный через усилитель с механизмом управления движителями l j. Недостатком данного устройства является то, что датчик направления дви жения требует наличия борозд на по.ле, что не обеспечиваетточность при работе машины на склонах. Цель изобретения - улучшение точности при работе на склонах. Цель достигается тем, что датчик направления движения выполнен в виде телескопической стрелы с фиксирующим центром на ее конце, состоящей из шар нирно связанных звеньев, причем, одно из звеньев выполйено в виде параллелограммного механизма. На фиг. 1 показана схема устройства для автоматического вож,дения сельскохозяйственной машины, вид сверху, на фиг. 2 - то же, вид сзади. Устройство для автоматического вождения сельскохозяйственной машины состоит из датчика 1 радиуса поворота, выполненного в виде стрелы с фиксирующим центром 2, состоящей из шарнирно связанных звеньев 3, причем одно из них выполнено в виде параллелограммного механизма, усилителя 4 с механизмом управления движителями 5, самоустанавливающегося колеса 6, контактного выключателя 7, удлинителя стрелы 8j вертикального шарнира 9, электрогидравлического усилителя 1 О, исполнитель й1Х элементов 11 . Устройство для автоматического вождения сельскохозяйственной машины работает следующим образом. Прямолинейное движение машины поддерживается самоустанавливагощлмся колесом 6, которое реагирует на разность
скоростей вращения движителей 5, и вводя сигнал в усилитель 4, устргпшет различие,скоростей колес машины.
В конце загона , когда самоустанавливающггеся колейо 6 сделает установленное число оборотов и фиксирующий центр 2 стрелы коснется конечного упора, сигнал поступает в усилитель 4 и Фиксирующий центр 2 внедряется в почву
Угол поворота машины определяется кинематикой движения машины. Радиус поворота машины задается удлинителем стрелы, вь полненной в виде телескопи ческой тяги, длина которой устанавливается в зависимости от ширины захвата обрабатываемой почвы. ; Движение машины по кругу радиусом, расстоянию от центра до оси ;ма-шины, контролируется датчиком раз:ности скоростей колес, выполненным в виде вертикального шарнира 9 и двух подвижно соединенных звеньев стрелы. Звенья шарнира 9 соединены с возможностью поворота и перемещения. Перемещение звеньев шарнира 9 возможно за счет датчика 1 радиуса поворота выполненного в виде подвижных телескопически соединенных деталей.
Движение машины с опущенным фиксирующим центром 2 происходит по кругу. Отклонение от этой траектории приводит к излому или к изменению длины стрелы. Излом стрелы вокруг вертикально.го шарнира 9 или изменение стрелы за счет перемещения деталей датчика 1 радиуса поворота передается посредством звеньев связи механизму Поворота маши№1.
Усилительно-исполнительный элемент механизма поворота, связанный с шарниром 9 и датчиком 1 радиуса поворота, поддерживают скорости ведущих ко290004
лес таком соотношении, какое требуется для движения по кругу с центром, совпадающим с осью центра 2. При этом скорости колес пропорциональны радиусам их поворота. При забегании внутреннего Колеса вертикальный шарнир 9 через звенья связи воздействует на механизм поворота машины, так чтобы это колесо отстало, при отставании - наоборот.
Поворот машины по кругу продолжается до тех пор, пока контактный выключатель 7, замкнув контакты, не подает электрический сигнал об осущест15 влении поворота на заданный угол в электронаГ11ИТЫ электрогидравлического усилителя 10, питающего гидроциливдры подъема и поворота стрелы. После вытягивания центра 2 из почвы стрео ла поворачивается (меняет позицию) и останавливается.
Формула изобретения
Устройство для автоматического вождения сельскохозяйственной машины, содержащее датчик направления движения, кинематически связанный через
усилитель с механизмом управления движителями, отличающееся тем, что, с целью улучшения точности при работе на склонах, датчик направления движения выполнен в виде телескопической стрелы с фиксирующим центром на ее Конце, состоящей из шарнирно связанных звеньев, причем, одно из звеньев выполнено в виде параллелограммного механизма.
Источники информации,
принятые во внимание ,при экспертизе 1. Патент Англии № I26818I, кл. В. 26 D 1/26, 1969.
5 /
dZ
I
ii
:/
(p
5
З
I i
fm.1
