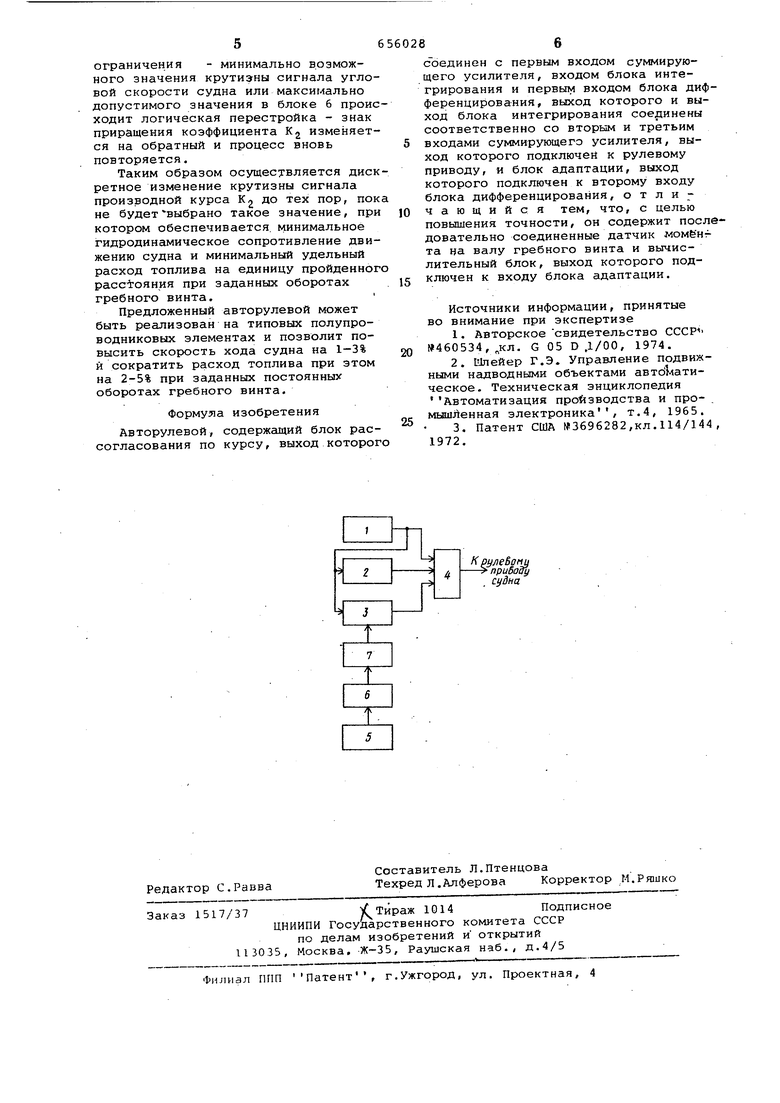
(54) АВТОРУЛЕВОЙ 3 Однако наибольший экономический эффект от рейса при минимальном сопротивлении движению судна может быть достигнут при такой настройке авторулевого, когда расход топлива на .единицу пройденного судном пути буде /минимально возможным при заданных постоянных оборотах гребного винта, а скорость движения судна наибольшей В настоящее время, когда расход топлива является доминирующим в стоимости рейса, необходимо подстраивать в авторулевом сигнал производной курса таким образом, что бы обеспечить минимальное сопротивление движению судна, т.е. перестраи вать крутизну сигнала производной (коэффициент К) в зависимости от изменения величины момента на гребно валу в установившемся режиме при заданных постоянных оборотах гребного винта. Постоянство оборотов гребного винта на современных, силовых установ ках обеспечивается специальным регулятором (например, типа Вудворта), поэтому увеличение гидродинамическог сопротивления движению судна за счет его рыскания из-за неоптимальной настройки авторулевого, приводящего к частым и достаточно большим по ампли туде перекладкам руля, скажется имен на увеличении момента на гребном вал увеличении расхода топлива при задан ных постоянных оборотах винта, что : приведет также к уменьшению скорости хода судна. Целью изобретения является повыше ние точности авторулевого за счет повышения качества стабилизации движения судна при минимальном гидродинамическом сопротивлении корпуса. поставленная цель достигается тем что авторулевой содержит последова. тельно соединенные датчик момента на валу гребного винта и вычислительный блок, выход которого подключен к вхо ду блока адаптации. 6S602.e Функциональная схема предлагаемого авторулевого приведена rfa чертеже Авторулевой содержит блок 1 рассогласования по курсу, блок 2 интегрирования, блок 3 дифференцирования суммирующий усилитель 4, датчик 5 момента на валу гребного §инта, вычислительный, блок б, блок адаптации 7. Блок рассогласования 1 по курсу подключен к блоку интегрирования 2 и суммирующему усилителю 4. Блок интегрирования 2 подключен к входу суммирующего усилителя 4. Блок 3 подключен к входу суммирующего усили теля 4. Выход суммирующего усилителя 4 подключен к входу рулевого привода (на чертеже не показан). Датчик момента 5 на . валу гребного винта подключен к вычислительному блоку 6, выход которог подключен к блоку адаптации 7. Выход блока 7 подключен к. управляющему входу блока дифференцирования 3. Устройство работает следующим образом. В режиме стабилизации курса при рыскании судна относительно 1генерального курса сигналы блока 3, пропорциональные производной от угла курса блока рассогласования 1 по курсу и блока интегрирования 2, поступают на вход суммирующего усилителя 4. В результате рулевой привод отклоняет руль на некоторый угол, чтобы возвратить судно к прежнему курсу. В зависимости от крутизны сигнала производной курса (величины коэффициента К J, ) при одном и том же рыскании - угле и скорости отклбнения от генерального курса - формируется различное значение угла перекладки руля. Отклонение руля в свою очередь, кроме момента одерживания и некоторого увеличения гидродинамического сопротивления движению судна, приводит к появлению угла дрейфа,а, следовательно,к более существенному увеличению сопротивления прямолинейному движению судна. Увеличение сопротивления движению судна приводит к падению скорости хода судна, даже если обороты гребного винта поддерживаются постоянными. Падение скорости хода судна приводит к увеличению тяги гребневого винта, что в свою очередь приводит к увеличению мощности и расхода топлива. Среднее значение момента нагрузки на валу гребного вин-та, т.е. сигнал, снимаемый с датчика момента 5, также увеличивается. Этот сигнал поступает в вычислительный блок 6, в котором вычисляется среднее значение момента на валу гребного винта за промежуток времени at 5 - 26 минут. Осреднение по времени (At) необходимо для исключения влияния случайных флюктуации Уиомента, вызванных волнёйием моря, качкой судна и другими подобными случайными явлениями. Ве.личина At зависит от типа судна и устанавливается для каждого судна своя, Через время Д t средняя величина момента (М;) запоминается в блоке 6, затем в момент t+At вновь вычисляется текущее значение средней величины момента V за промежуток времени Д t. После чего в блоке 6 вычисляется приращение момента Д М М.- М; . Если величина Д М J получилась положительной, вырабатывается сигнал на увеличение коэффициента Кл. Если величина А М отрицательна - вырабатывается сигнал на уменьшение К. Данная команда поступает в блок адаптации 7. Далее через интервал времени t-ut- -it снова происходит сравнение нового значения с предыдущим и весь цикл повторяется. В случае достижения К ограничения - минимально возможного значения крутизны сигнала угло вой скорости судна или максимально допустимого значения в блоке 6 прои ходит логическая перестройка - знак приращения коэффициента Kj изменяет ся на обратный и процесс вновь повторяется. Таким образом осуществляется дис ретное изменение крутизны сигнала производной курса Kj до тех пор, по не будетвыбрано такое значение, при котором обеспечивается, минимальное гидродинамическое сопротивление движению судна и минимальный удельный расход топлива на единицу пройденног расстояния при заданных оборотах гребного винта. Предложенный авторулевой может быть реализован на типовых полупроводниковых элементах и позволит повысить скорость хода судна на 1-3% и сократить расход топлива при этом на 2-5% при заданных постоянных оборотах гребного винта. Формула изобретения Авторулевой, содержсцций блок рассогласования по курсу, выход которог 8 соединен с первым входом суммирующего усилителя, входом блока интегрирования и первым входом блока дифференцирования, выход которого и выход блока интегрирования сое 1инекы соответственно со вторым и третьим входами суммирующего усилителя, выход которого подключен к рулевому приводу, и блок адаптации, выход которого подключен к второму входу блока дифференцирования, отличающийся тем, что, с целью повышения точности, он содержит последовательно соединенные датчик момёНгта на валу гребного винта и вычислительный блок, выход которого подключен к входу блока адаптации. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 460534,кл. G 05 ОД/ОО, 1974. 2.Ылейер Г.Э. Управление подвижными надводными объектами авто атическое. Техническая энциклопедия Автоматизация производства и промышЛенная электроника , т.4, 1965. 3.Патент США №3696282,кл.114/144, 1972.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления движением судна | 1981 |
|
SU979204A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2029346C1 |
| Устройство для перестройки параметров авторулевого | 1974 |
|
SU528546A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| Авторулевой | 1979 |
|
SU842725A1 |
| Устройство для перестройки параметровАВТОРулЕВОгО | 1979 |
|
SU830325A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| Авторулевой | 1981 |
|
SU1095803A1 |
| Устройство для управления движением судна | 1983 |
|
SU1150155A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2248914C1 |
К руле Вони - прибоЭу судна
