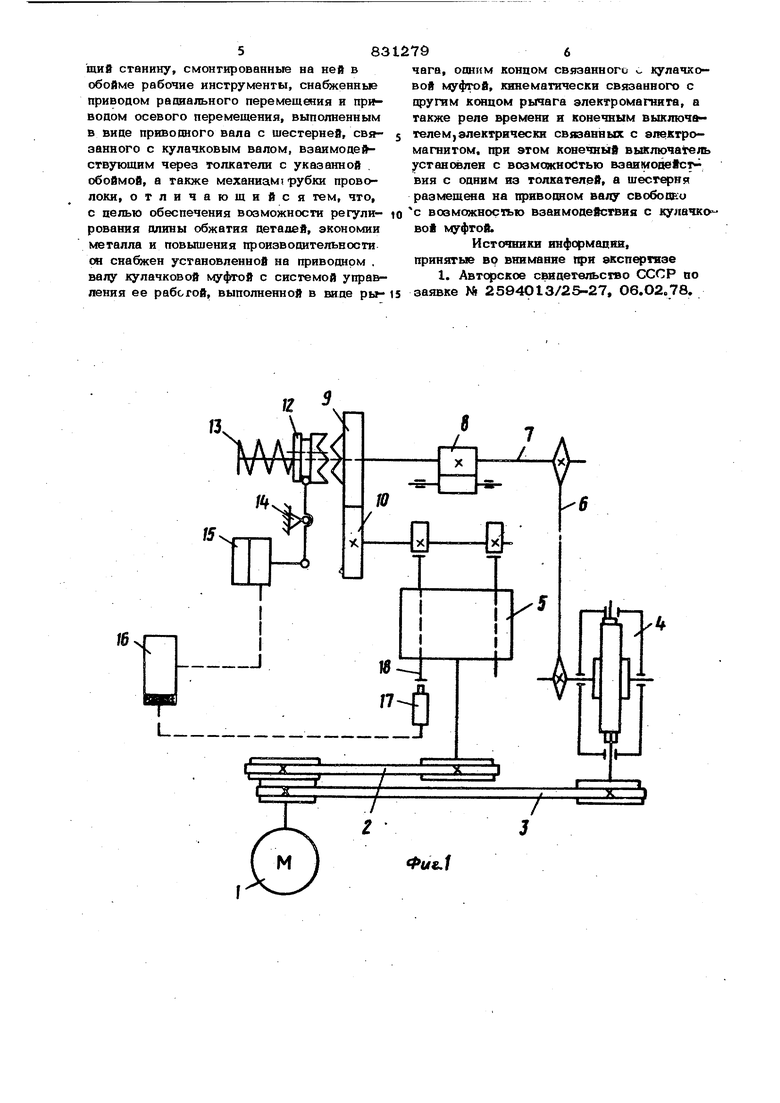
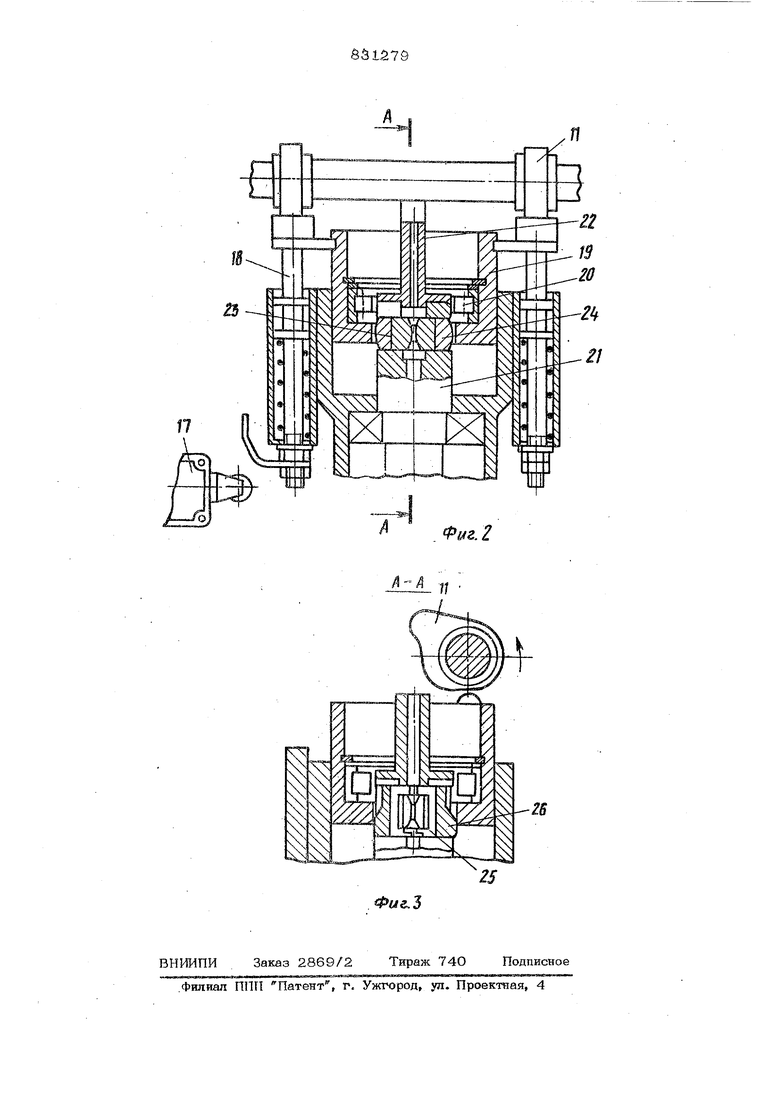
(54) РАДИАЛЬНО-ОБЖИМНОЙ АВТОМАТ ДЛЯ ОБРАБОТКИ ДЕТАЛЕЙ ИЗ ПРОВОЛОКИ воином валу свободно, с возможностью вааимодейогвия с кулачковой муфтой. На фиг. 1 изображена кинематическая схема рациально-обжимного автомата; на фиг. 2 - редуцирующая головка, на фиг. 3 - сечение А-А на фиг. 2. Радиаяьно-обжимной автомат содержит электроовигатель I, который связан через клиноременные передачи 2 и 3 с червячн т ным редуктором 4 и редуцирующей головкой 5. Червячный редуктор 4 связан через цепную передачу 6 и приводной вал 7 с роликом 8 подачи проволоки. На привод НОМвалу 7 установлена свобооно шестерня И 9, находящаяся в зацеплении с шестерней Ю, закрепленной на кулачковом валу 11. Ведущая шестерня 9 взаимодействует с кулачковой муфтой 12, установленной на приводном валу 7 с пружиной 13 возврата связанной с подвижной частью кулачковой муфты, 12. .Система управления работой муфты содержит рычаг 14, связанный с кулачковой муфтой 12 и электромагнитом 15, который имеет электрическую связь с реле 16 времени и конечным выключателем 17. Редуцирующая головка 5 состоит из толкателей 18, которые связаны через стакан 19 с роликоподшитшком 20 шпинделя 21, соединенного с направляющей 22, в диаметральных пазах шпинделя расположены матрицы 23 и обжимные бойки 24. Механизм рубки состоит из ножей 25 и бойков 26. Автомат работает следующим образом, Электродвигатель 1 посредством клино ременной передачи 2 передает вращение шпинделю 21, редуцирующей головке 5 и через клиноременную передачу 3, червячгный редуктор 4..цепную передачу 6 - привоциому валу 7 с кулачковой муфтой 12. Шестерня 9, связанная с муфтой 12,. передает вращение шестерне Ю и кулачковому валу 11, которы вращаясь, управляет работой редуцирующей головки 5. При вращении шпинделя 21 матрицы 23 .и ножи 25 механизма рубки, расположенные в диаметральных пазах шпинделя 21, под действием центробежной силы раздвиг ются и образуют зазор между собой В это время через редуцирующую головку 5 проходит необжатый участок проволоки, по даваемый роликом 8 подачи через направляющую 22. Когда кулачки вала 11 при своем вращении нажимают на толкатели 18, то стакан 19 перемещается с ролико подшипником 2О, ролики которого входят 3 9.4 соприкосновение с обжимными бойками 4. Обжимные бойки 24 совместно с атрицами 23 получают помимо вращаельного движения возвратно-поступателы - ое, и матрицы 23 производят радиальное обжатие проволоки. Одновременно с этим олкатель 18 нажимает на конечный вь лючатель 17, от него поступает сигнал через реле 16 времени, на котором устаовлено требуемое время, необходимое для обжатия проволоки нужной длины, на электромагнит 15. Электромагнит перемещает связанный с ним конец рычага 14, другой конец которого, связанный с кулачковой муфтой 12, перемещает ее подвижную часть вдоль вала 7, сжимая пружину 13 и разрьшает кинематическую связь между кулачковым валом 11 и электродвигателем 1. Головка 5 остается во включенном состоянии и производит обжатие проволоки необходимой цлиньи После истечения заданного времени реле 16 времени подает сигнал на отключение электромагнита 15 и под действием пружины 13 возврата подвижная часть кулачковой муфты 12 возвращается в рабочее положение. Кинематическая связь восстанавливается, кулачковый вал 11 приводится во вращение и кулачки нажимают на толкатели 18 своей второй выступающей поверхностью. Стакан 19 с роликоподшипником 20 перемещается еще дальше и бойки 26 входят в соприкосновение с роликами роликоподшипника 2О. Ножи 25 механизма рубки смыкаются и производят отрезку проволоки. После отрезки проволоки толкатели 18 поднимают и перемещают стакан 19 с роликоподшипником 20. Ролики роликоподшипника выходят из .соприкосновения с бойками 24 и 26. Матрицы 23 и ножи 25 расходятс и через редуцирующую головку 5 прсжодят следующий участок нёобжатой нровлоки, после чего цикл работы повторяется. Использование изобретения даетвозмож-. ность получать проволоку периодичес :с)Го сечения с участками обжатия любой необходимой длины. Это позволяет экономить металл, так как обжатие и отрезка проволоки в определенный размер происходит без отхода, а также повышает производительность труда за счет получения детали за одну рубку. Формула изобретения Радиально-обнсимной автомат для обработки деталей из проволоки, содержашив станину, смонтированные на ней в обойме рабочие инструменты, снабженные приводом раоиального перемещения и npi водом осевого перемещения, выполненным в виде приводного вала с шестерней, CBS занного с кулачковым валом, взаимодействующим через толкатели с указанной , обоймой, а также механнам; -рубки проволоки, отличающийся тем, что, с целью обеспечения возможности регулирования длины обжатия деталей, экономии металла и повышения производительности он снабжен установленной на приводном . валу кулачковой муфтой с системой управления ее работой, выполненной в виде
чага, одним концом связанного о кулачковой муфтой, кинематически связанного с другим кондом рычага электромагнита, а также реле времени и конечным выключателем, электрически св8зан1аых с 81юктромагнитом, при этом конечный выключатель установлен с возмокиоСтью взаимопейст ВИЯ с одним из толкателей, а шестерня размещена на приводном валу свобош :и с возможностью взаимодействия с кулачко вой муфтой.
Источники информации, прин51тые во внимание 1фи экспертизе
1. свидетельство СССР по заявке Mi 2594013/25-27, О6.О2.78.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиально-обжимной автомат | 1978 |
|
SU676363A1 |
| Радиально-обжимной автомат для изготовления изделий из проволоки | 1985 |
|
SU1234027A1 |
| Автомат для ротационного обжатия | 1990 |
|
SU1814959A1 |
| РОТАЦИОННО-ОБЖИМНОЙ АВТОМАТ НЕПРЕРЫВНОГО | 1966 |
|
SU179739A1 |
| Автомат для изготовления проволочных граблин | 1980 |
|
SU925493A1 |
| ОТРЕЗНОЕ УСТРОЙСТВО АВТОМАТА ДЛЯ ПРАВКИ И РЕЗКИ ПРОВОЛОКИ | 1991 |
|
RU2028202C1 |
| Радиально-обжимной автомат | 1981 |
|
SU1013028A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ГВОЗДЕЙ | 1992 |
|
RU2019351C1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
| Автомат для изготовления двухветвевых пружин с отогнутыми концами | 1982 |
|
SU1052304A1 |
Фиг.1
иг.2
