,. (54) ЗАХВАТ ОЧУВСТВЛЕННСГО МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Очувствленный схват робота | 1985 |
|
SU1373565A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Схват очувствленного робота | 1984 |
|
SU1227464A1 |
| Устройство управления схватом манипулятора | 1988 |
|
SU1824299A1 |
| Захват манипулятора | 1978 |
|
SU770788A2 |
| Схват манипулятора | 1984 |
|
SU1323376A1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| Очувствленный схват манипулятора | 1984 |
|
SU1178587A2 |
| МАНИПУЛЯТОР С ОСЯЗАТЕЛЬНЫМ ОЧУВСТВЛЕНИЕМ | 1969 |
|
SU234763A1 |
I
Изобретение относится к захватным устройствам и может быть иснользовано в очувствленных манипуляторах при наличии измерителей усилия на исполнительном органе, подающих сигналы в систему управления приводом.
Известен захват, выполненный в вице кинематически связанных с приводом, зажных губок, на которых установлены тактильные датчики тензометрического типа
W.
Однако для обеспечения радиационной стойкости на поверхность тензодатчиков известного захвата напыляется фторолон, что снижает их упругие свойства. Кроме того, тензодатчики являются элементами одноразового использования и их примене ние в герметичных камерах атомной промышленности особенно затруднено, так как при частых заменах требуется сложная тарировка.
Целью изобретения является повышение надежности захвата при работе в агрессивных с родах.
Для этого губка с датчиком выполнена с пазами и с каналом для подвода рабочей среды и снабжена накладкой с выступами, установленной с возможностью перемещения относительно губки, причем паз в губке против центрального выступа накладки закрыт мембраной, на входе канала также смонтирована мембрана, а вход в канал расположен против датчика усилия сжатия объекта.
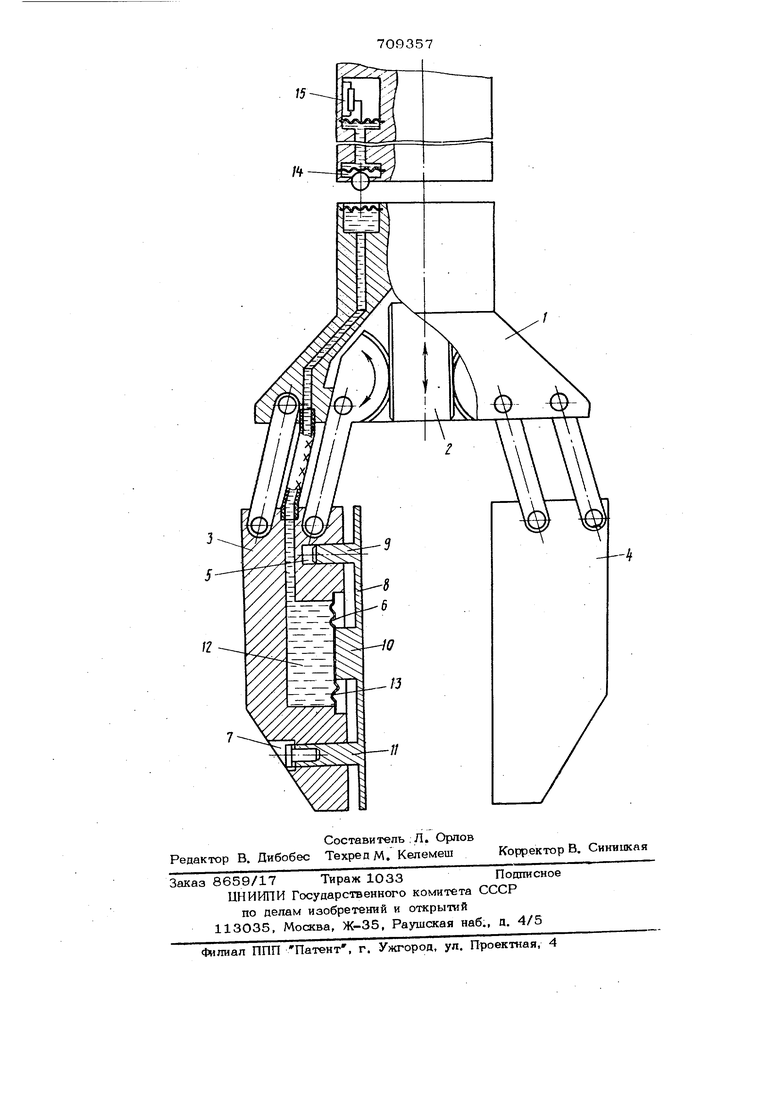
На чертеже изображен предлагаемый захват, общий вид,
В корпусе 1 захвата помещен толкатель 2, кинематически связанный с губками 3 и 4 с одной стороны и с приводом (на чертеже не показан) - с другой. Губка 3 имеет пазы 5-7 и накладку 8 с выступами 9-11. Накладка 8 может перемещаться при захвате предмета и сжатии губок, при этом выступы 9-11 тоже могут перемещаться в соответствующих пазах 5-7. Для предотвращения выпадания накладки 8 из пазов губки 3 при изменении положения захвата в пространстве один из ее выступов, например выступ 11, фиксируют в пазу 7, В оаном из пазов, например в пазу 6, размещена гидропередача 12 мембранного типа. С одной стороны мембрана 13 взаимо- действует с выступом 10 накладки 8, а с другой стороны мембранный разделитель 14 взаимодействует с датчиком 15 усилия сжатия, преобразующим давление в электрический сигнал, управляющий приводом. Момент от приводного механизма чере кинематические связи вызывает перемеще ние губок 3 и 4 навстречу друг другу дл захвата объекта. Усилие схвата воспринимается накладкой 8 губки 3, в результате чего ее выступы 9, 10, 11 перемещаются в соответствующих пазах 5, 6 и , Выступ 10, перемещаясь в пазу 6, воздействует на мембрану 13. Посредством гидропередачи 12 деформации мембраны 13 через мембранный разделитель 14 передаются датчику 15 усилия сжатия. Чем сильнее схватывается объект захватом, тем больше деформируется мембрана 13, тем больше будет сигнал с датчика 15, управляющий приводом. Так как поверхность накладки губки предлагаемого захвата воспринимает усиие схвата непосрепственно, то установа специальных датчиков в герметичных камерах не требуется. Формула изобретения Захват очувствленного манипулятора, содержащий кинематически связанные с приводом зажимные губки, по крайней мере, на одной из которьх установлен датчик усилия сжатая объекта, включенный в цепь управления приводом, о т л и- ча ющийс я тем, что, с целью повы- щения надежности при, работе в агрессивных средах, губка с датчиком выполнена с пазами и каналом для подвода рабочей среды и снабжена накладкой с выступами, установленной с возможностью перемещения относительно губки, причем паз в губке против центрального выступа накладки закрыт мембраной, на входе канала также смонтирована мембрана, а вход в канал расположен напротив датчика усилия сжатия объекта. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 423623, кл. В 25 Т 15/04, 1971 (прототип).
