Изобретение относится к сельскохозяйственному машиностроению и может быть использовано при групповом управлении несколькими тракторными агрегатами одним трактористом.
ж
Известны индукционные устройства
для группового воиздения тракторных агрегатов, содержащие генератор переменного тока с излучателем, устанавливаемые на ведущем агрегате ,и измерительно-регулирующий блок с приемной антенной, устанавливаем1,1е на ведомом агрегате.Поперечное смещение ведомого агрегата относительно ведущего достигается установкой излучателя и антенны на выносных брусьях таким образом, чтобы излучатель и антенна располагались на прямой, параллельной направлению движения агрегатов, и были смещены относительно продольных осей агрегатов на величину требуемого поперечного смещения агрегатов l .
Недостатком данных устройств является ограничение поперечного смещения агрегатов длиной выносных брусьев.
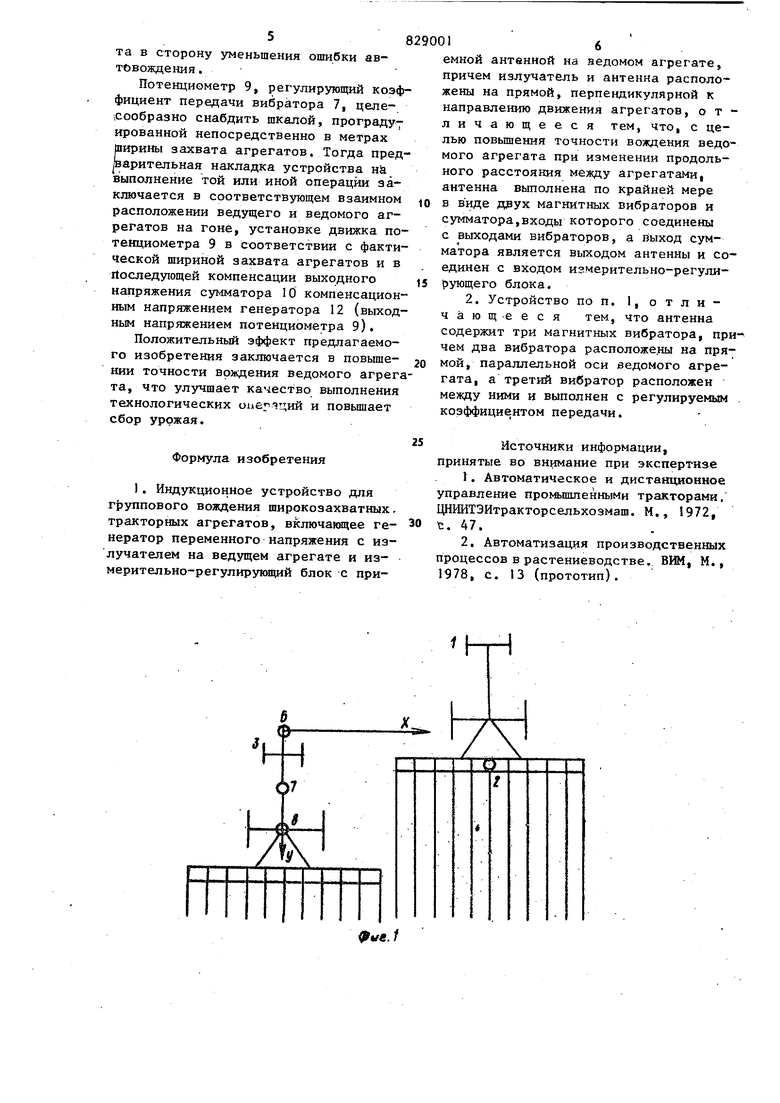
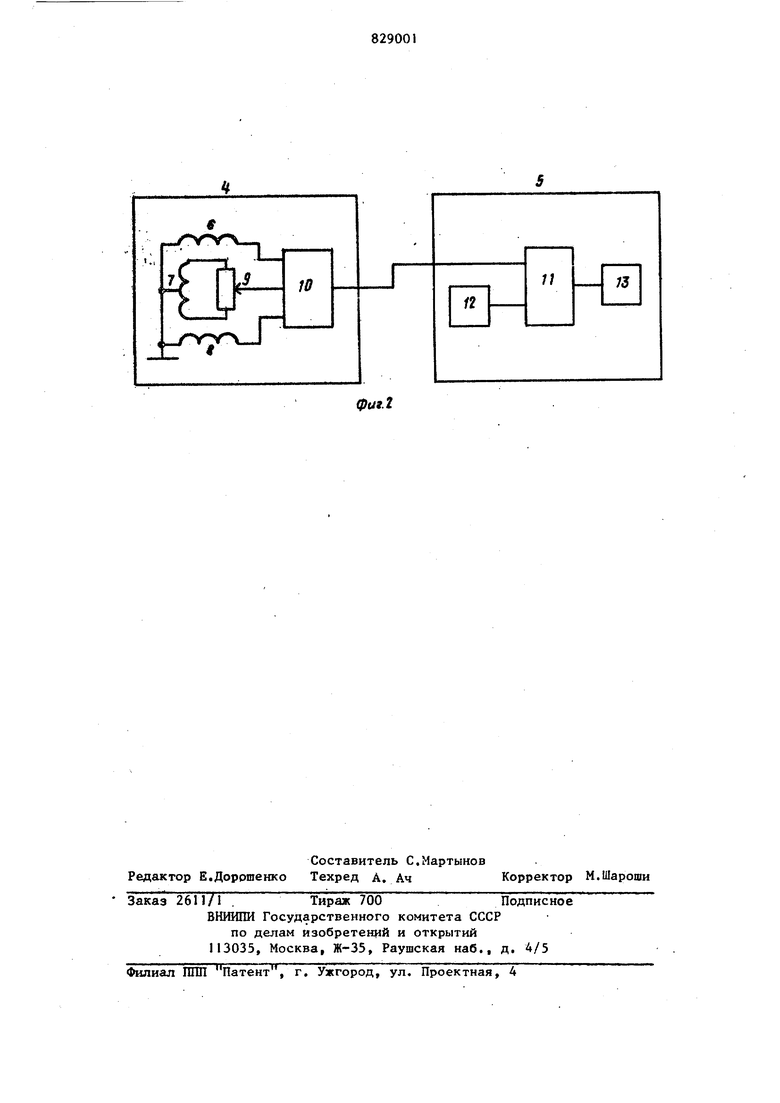
Наиболее близким техническим решением к предлагаемому является индукционное устройство для группового вождения широкозахватных агрегатов включающее генератор переменного напряжения с излучателтем на ведущем агрегате и измерительно-регулирующий блок с приемной антенной на ведомом агрегате. Излучатель и антенна расположены на прямой, перпендикулярной к направлению движения агрегатов. Измерительно-регулирующий блок этого устройства включает источник компенсационного напряжения, схему сравнения выходного напряжения антенны с компенсационным исполнительным механизмом рулевого управления ведомого агрегата; При изменении расстояния между излучателем и антенной выходной сигнал последней изменяется, в связи с чем на выходе схемы сравнения появляется напряжение ошибки автовож дения, постзт1ающее на исполнительный механизм и изменяющее направление дв жения ведомого агрегата в сторону уменьшения рассогласования между выходным напряжением антенны ,и компёнсадаонннм напряжением 21. Недостатком этого устройства явля ется низкая точность вожде 1ия ведомо го агрегата при изменении продольног расстояния между агрегатами, так как последнее приводит к перемещению ведомого агрегата относительно ведущего по дуге окружности, радиус которо равен требуемому,поперечному смещени агрегатов. Цель изобретения - повьппение точности вождения ведомого агрегата при изменении продольного расстояния меж ду ведущим и ведомым агрегатами. Поставленная цель достигается тем что антенна выполнена по крайней ме;ре в виде двух магнитнъгх вибраторов и сумматора, входы которого соединены с выходами вибраторов, а выход сумматора является вьподом антенны и соединен с входом измеритель но-регулирующего блока. ; Кроме того, антенна содержит три магнитных вибратора, причем два вибратора расположены по прямой, параллельной оси ведомого агрегата, а тре тий вибратор расположен между ними и выполнен с регулируемым коэффициен том передачи. . На фиг. 1 показан о взаимное расположение агрегатов при движении на .roHej на фиг. 2 - структурная схема индукционного устройства. На ведущем агрегате 1 расположен генератор переменного напряжения с излучателем 2, а на ведомом -агрегате - 3 расположены приемная антенна 4 и, измерительно-регулирующий блок 5. Приемная антенна 4 содержит вибраторы 6, 7 и 8, потенциометр 9 и сумматор 10, а измерительно-регулирующий блок 5 содержит .схему 11 сравнения, источник 12 компенсационного напряже ния и исполнительный механизм 13 рулевого управления ведомого агрегата. Магнитные виб,раторы 6 и 8 располо жены, на прямой, параллельной продоль ной оси ведомого агрегата 3, на расстоянии М друг от друга. Магнитный вибратор 7 расположен между первыми (6 и 8). Рдбочим является тако (расположение агрегатов, при котором проекция излучателя 2 на продольную ось ведомого агрегата расположена между магнитными вибраторами 6 и 8. Входы сумматора 10 соединены с выходами магнитных вибраторов 6 и 8 непо средетвенно, а с выходом магнитного вибратора 7 - через потенциометр 9, регулирз ющий коэффициент передачи маг нитного вибратора. Выход сумматора 10 соединен с одним из входов схемы 11 сравнения, второй вход которой соединен с выходом источника 12 компенсационного напряжения. Выход схемы 11 сравнения соединен с входом исполнительного механизма 13 рулевого управления ведомого агрегата. Устройство работает следующим образом. Излучатель 2, выполненный в виде горизонтального кругового витка создает в окружающем пространстве переменное магнитное поле, обладающее круговой симметрией. Напряженность этого поля в месте нахождения ведомого агрегата преобразуется вибраторами 6, 7 и 8 в пропорциональные напряжения, которые поступают на входы сумматора 0. Выходное напряжение -сумматора 10 равно сумме входных напряжений и зависит прежде всего от поперечного смещения агрегатов, т, е. от координаты X излучателя 2 в прямоугольной системе координат ХОУ, начало которой совмещено с центром вибратора 6, а оси ОХ и су направлены соответственно перпендикулярно и параллельно продольной оси ведомо.го агрегата. Это напряжение поступает на один из входов схемы 11 сравнения, на второй вход которой поступает компенсационное напряжение с выхода источника 12. Если фактическое значение поперечного смещения агрегатов равно требуемому знатора 10 равно компенсационному и напряжение на выходе схемы, 11 сравнения отсутствует. При этом исполнительный механизм 13 рулевого управления выключен и ведомый агрегат движется в заданном направлении., Если же ведомый агрегат отклоняется от требуемого i oложения, то выходные напряжения вибраторов 6, 7 и 8 и сумматора 10 изменяется и на выходе схемы 11 сравнения появляется напряжение ошибки вождения. Это напряжение включает исполнительный механизм 13, который изменяет направление движения ведомого агрегата в сторону уменьшения ошибки автовождения. Потенциометр 9, регулирующий коэф фициент передачи вибратора 7, целе сообразно снабдить шкалой, проградут ированной непосредственно в метрах Ширины захвата агрегатов. Тогда пред Дарительная накладка устройства н1а выполнение той или иной операции заключается в соответствующем взаимном расположении ведущего и ведомого агрегатов на гоне, установке движка потенциометра 9 в соответствии с фактической шириной захвата агрегатов и в Последующей компенсации выходного напряжения сумматора 10 компенсацион ным напряжением генератора 12 (выходным напряжением потенциометра 9). Положительный эффект предлагаемого изобретения заключается в повышеНИИ точности врзвдения ведомого агрег та, что улучшает качество выполнения технологических оперяций и повьш ает сбор урожая. Формула изобретения 1. Индукционное устройство для rjiynnoBoro вождения широкозахватных, тракторных агрегатов, включанвцее генератор переменного напряжения с излучателем на ведущем агрегате и измерительно-регулирующий блок с приемкой антенной на ведомом агрегате, причем излучатель и антенна расположены на прямой, перпендикулярной к направлению движения агрегатов, о т личающееся тем, что, с целью повьшения точности вождения ведомого агрегата при изменении продольного расстояния между агрегатами, антенна выполнена по крайней мере в виде дэух магнитных вибраторов и сумматора,входы которого соединены с выходами вибраторов, а выход сумматора является выходом антенны и соединен с входом измерительно-регули| ующего блока. 2. Устройство по п. 1, о т л и чающ-ееся тем, что антенна содержит три магнитных вибратора, причем два вибратора расположе.ны на прямой, параллельной оси ведомого агрегата, а третий вибратор расположен между ними и выполнен с регулируемым коэффициентом передачи. Источники информации, принятые во внимание при экспертизе 1.Автоматическое и дистанционное управление промьшшенными тракторами, ЦНИИТЭИтракторсельхозмаш. М., 1972, t. 47. 2,Автоматизация производственных процессов в растениеводстве. ВИМ, М., 1978, с. 13 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционное устройство для групповогоВОждЕНия ТРАКТОРНыХ АгРЕгАТОВ | 1979 |
|
SU835320A1 |
| Устройство для группового вождения тракторных агрегатов | 1979 |
|
SU950211A1 |
| Индукционная система дублерного вождения машинно-тракторных агрегатов | 1984 |
|
SU1246911A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1984 |
|
SU1197573A1 |
| Система группового управления самоходными агрегатами | 1978 |
|
SU880284A1 |
| Устройство ориентации для систем группового автоматического вождения машинно-тракторных агрегатов | 1979 |
|
SU1376963A1 |
| Система группового управления самоходными агрегатами | 1982 |
|
SU1061716A2 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ МАШИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2664033C1 |
| СПОСОБ ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ ДРОНОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662297C1 |
hH
о
