(54) УСТРОЙСТВО ДЛЯ ГРУППОВОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ АГРЕГАТОВ
1
Изобретение относится к сельскохозяйственному машиностроению, в частносга к устройствам для автоматизации вождения самоходных машин.
Известны устройства для автоматического вождения тракторных агрегатов, вкгаочаюшие тросовую связь между вещщим и ведомым агрегатами. Один конец троса закреплен на ведущем агрегате, а второй конец наматьгеается на ведомом агрегате на натяжной барабан, кинематически связанный с датчиком дгашы троса u:.
Однако датчик вьтолнен в виде преоб разователя угла цоворота натяжного бара«бана в электрическое напряжение, например в виде потенциометра. При изменении расстояния между агрегатами трос наматывается либо сматывается с натяжного барабана, утхэл поворота которого при этом изменяется. В результате изменяется также выходное напряжение датчика длины троса. Это напряжение поступает на блок управления, который иг меняет направление движения ведомого агрегата, поддерживая дггину троса между агрегатами постоянной. Но поскольку длина троса зависттт как от поперечного смещения агрегатов, так и от продольного расстояния между ними, то изменение последнего изменяет поперечное смещение агрегатов, так как ведомый агрегат перемешается при- этом отностельно ведущего по дуге окружности, радиус ко10торой равен требуемой длине троса. Это снижает точность вождения ведомого агрегата (определяемую поперечным смещением агрегатов), что и является недостатком известных устройств.
ts
Наиболее блЕСзКИМ по технической сущности к изобретению является устройство для группового вождения тракторных агрегатов, включающее тросовую связь,
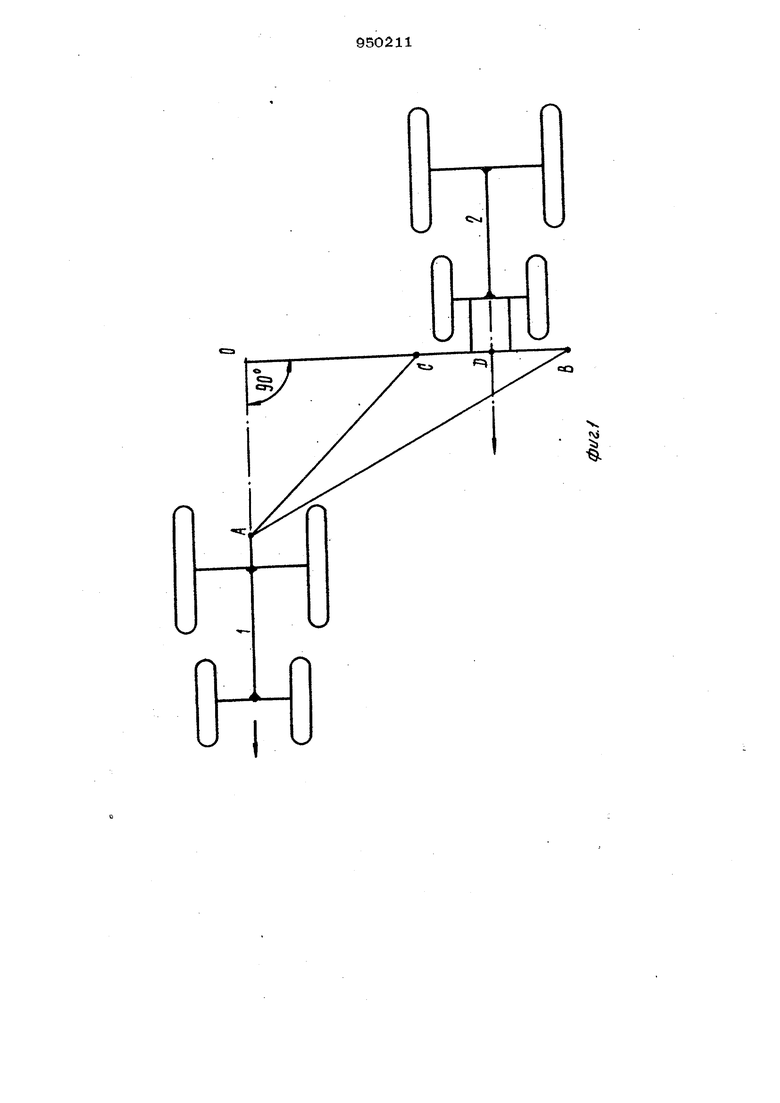
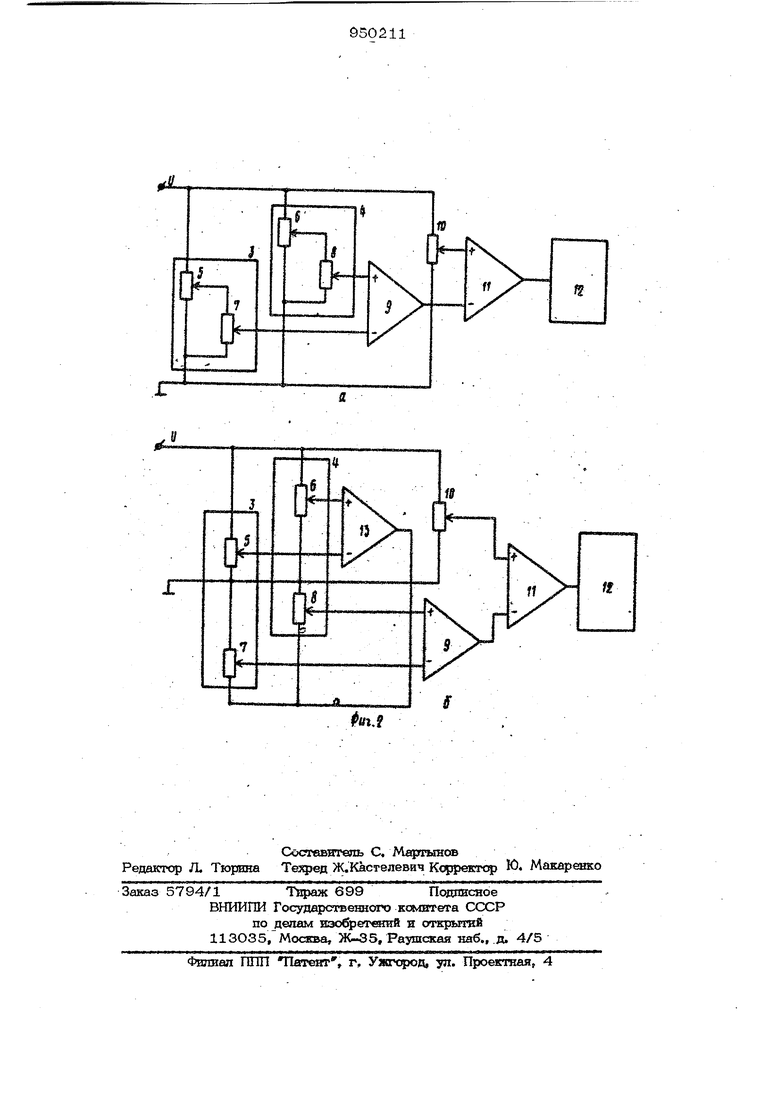
20 соединяющую ведущий и ведомый агрегаты, датчик длины троса, блок управления, блок питания и исполнительный .механизм рулевого управления ведомого агрегата. Недостатком этого устройства является значительная погрешность опредепегшя поперечного смеишгаш агрегата при воздействии ветровой нагрузки. Иегаз изобрете1Шя - повыше1Ше точности вождения ведомого агрегата. Цель достигается тем, что устройство снабжено схемой сравнения выходных нагфяжеиий датчиков длины троса, выход которой соединен с входом блока улрав пения, при этом точки крепления тросов на ведомом агрегате расположены на прямой, перпендикулярной к тфодольной оси ведо1.«)го агрегата. Кроме того, каж дый датчик длины троса вьшопнен в виде основного и дополнительного шшеШштх преобразователей длины троса в электрическое напряжение, причем основной преобразователь соединен с блоком питания, а дополиггепьный преобразователь, выход которого является выходом датчика длины троса, со схемой сравнения, а таклсе вход блока питания дополнительJUIX преобразователей соед1шен с выхода ми основных преобразователей, помимо этого устройство содержит сумматор, входы которого соеД1шены с выходами основных преобразователей, а выход сум матора соединен с входом блока питания дополнительных преобразователей. .На фиг. 1 показано взаимное располо жение ведущего и ведомого агрегатов при движении на гоне, на фиг. 2 а и 5 два варианта предлагаемого устройства, отличающиеся схемой соединения преобразователей, образующих датчики длииы тросов. Устройство включает тросовую связь, соед юяющую ведущий 1 и ведомый 2 агрегаты и состоящую иэ двух тросов АВ и АС, нама-пываемых на барабаны в точках В и С, причем точют В и С расположены на прямой ВС, перпендикулярной к продольной оси ведомого агрегата, датчики длины троса 3 и 4, выполненные в виде основных 5 и 6 и допогаштельных 7 и 8 преобразователей длины троса в электрическое напряжение, причем основные преобразователи 5 и 6 сое динены с блоком питания (на схеме обозначены зажимы I/ ), а дополнительные преобразователи 7 и 8, выходы KOTqpbix являются выходами датчиков длины тросов 3 и 4, соединены со схемой сравнения 9, блок управле1Вия, содержащий по- теншюметр 10 для задания поперечного смещения агрегатов 1 и 2 и схему срав нения 11, исполнительный механизм 12 рулевого управлешш ведомого агрегата 2 Возможны два варианта соедина ия основных 5 и 6 и дополнительных 7 и 8 преобразователей датчиков длины троса 3 и 4, Согласно первому варианту блок питания дополга1тельных преобразователей 7 и 8 соединен с выходами основных преобразователей 5 и 6. Согласно второму варианту устройство содержит сумматор 13, входы которого соединены с выходами основных преобразователей. В обоих случаях основной и дополнительный преобразователи каждого из датчиков 3 и 4 расположены на общей оси, кинеамтически связанной с соответствующим барабаном. Выходные напряжения Vg и V(, основ HbES преобразователей 5 и 6 пропоршгоналыгы напряжению питания V и длине соответствующего троса: V K-V-A6; (). V rK-v-лс., (г) где к - коэффициент пропорпиональностя. В устройстве эти напряжения являются напряжениями питания доползпггельных преобразователей 7 и 8, измеряющих цпушу тех же тросов, поэтому их выходные напряже1шя V и Vg : ..(3) Vg .VAc. (4) Эти напряжения вычитаются друг из друга схемой сравнеюш 9, выходное напряжение Vg которой: . (5; пропорционально поперечному рлещению агрегатов ОД. Действительно, как следует из прямоугольных треугольников АОВ и АОС: 0&( (fe) осЧлс -/|о.(-г/ Возводя (б) в квадрат и вычитая почленно (7), получим: вc fг&coc / в - c.(8) . Откуда поперечное смещение агрегатов ОД: OD-..) Как видно из (9) и (5) выходное напряжение схемы сравнения 9 пропорционально поперечному смешению агрегатов ОД. Это напряжение поступает на один Кэ входов схемы сравнения 11, на второй вход которой поступает напряжение с выхода потенциометра 1О, являющегос задатчиком веяичвны попере пгого смещения агрегатов. Если факт1гческое значение смещения равно требуемому (т.е. ео пи ошибка автовоясде шя отсутствует), то выходные напряжения схемы сравнения 9 и потенциометра Ю будут равными, напряжения на выходе схемы сравнения 11 будут отсутствовать и испопшггепьгаэ1Й механизм 12 рулевого управления ведомого агрегата будет выключен. Если же появляется ошибка автовождения, напряжение на выходе схемы сравнения 9 изменяется и на выходе схемы сра&нения 11 появляется напряжение (лиибки автовождения ведомого агрегата, включающее исполнительный механизм 12 рулевого управления. В результате напра вление движения ведомого агрегата иэменяется в сторону уменыиения появивщейся ощибки автовождения. Если преобразователи датчиков соединены по второму вартшнту, то выходное напряжение V/jj сумма-тчэра 13 пропоршюнально сумме входных напряжений т.е. сумме дшш тросов АВ и АС: V.,,,-Vg V К« V- 1А&+AC) , (10) то напряжение является напряжение питания преобразователей 7 и 8, поэтому их выходные напрягкенпя: V К -V - АВ ()- АБ; (и) (.{il) Выходное ишфяжение .Vg схемы сравнения 9 равно разности входных на15)яж©иий, поэтому. s К. V- (Л& АсДА6-АС ЛУ() Т.е. будет таким же, как к в устройстве по первому варианту. В остальном работа устройства по второму варианту не отличается от работы устройства по п вому варианту. Устройство не чувствителыю к направ лению тросов АВ и АС и поэтому облада ет более высокой помехоустойчивостью к ветровой нагрузке, что и обеспечиваем более высокую точность автоматического вождения ведомого агрегата. 115 Положительный эффект предложения эо ключается в повышегаш точности вождения ведомого агрегата и соответственно в утгучшешп качества выполнения технологи- ческих операций, тго в конечном итоге увегапашает сбор урожая возделываемых растеш1и. Формула изобретения 1.Устройство для группового вожде- . ния сельскохозяйственных агрегатов, включающее тросовую связь, соединяк щую ведущий и ведомый aiperaT, датчики длины тросов, блок управления, блок питания и исполнительный механизм рулевого управления ведомого агрегата, отличающееся тем, что, с целью повышения точзгости вождения ведомого агрегата, оно снабжено схемой сравнения выходных напряжений датчиков длины тросов, выход которой соединен с входом блока управления, при этом точки креппе1ИЯ тросов на ведомом агрегате расположены на прямой, перпе11дикул1фной к продсишной осп ведомого агрегата. 2.Устройство по п. 1, о т л и ч а ю щ е е с я тем, что каждый из датчиков дайны тросов выполнен в виде основнсягю и дополнительного лзшейных преобразовате лей даганы троса в электрическое напряжение, причем основной преобразователь соединен с блоком питания, а дополнительный преобразователь, выход которого я&ляется выходом датчика дшшы троса, соединен со схемой сравнения. 3.Устройство по п. 2, о т л в ч а ю щ е е с я тем, что бтж питания дополнительных преобразователей соешшен с выходами основных преобразователей. 4.Устройство по п. 2, о т л и ч а ю щ е 6 с я тем, что оно содержит сумматор, входы которого соединены с выходами основных преобразователей, а выход сумматора с блоком питания допопнвтепыа 1Х преобразователей. Источники ннфсфмацвн, принятые во внимание при экспертизе 1.Проблемы автоматвэашга сельскохозяйстве1шого производства, М., Колос, 1964, с. 150. 2.Авторское свидетельство СССР по заявке Ms 2610942/30-15, кл. А 01 В 69/04.
со
Чч
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционное устройство для груп-пОВОгО ВОждЕНия шиРОКОзАХВАТНыХТРАКТОРНыХ АгРЕгАТОВ | 1979 |
|
SU829001A1 |
| Устройство для автоматического группового вождения тракторных агрегатов | 1978 |
|
SU751344A1 |
| Индукционное устройство для групповогоВОждЕНия ТРАКТОРНыХ АгРЕгАТОВ | 1979 |
|
SU835320A1 |
| Устройство для автовождения машинно-тракторных агрегатов | 1986 |
|
SU1405719A1 |
| СПОСОБ АВТОВОЖДЕНИЯ СЕЛЬХОЗАГРЕГАТА | 1991 |
|
RU2025924C1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Устройство для автоматического вождения мобильного агрегата | 1985 |
|
SU1336965A1 |
| Устройство для автовождения колесных машинно-тракторных агрегатов | 1984 |
|
SU1235458A1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОГО АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРНЫХ АГРЕГАТОВ | 1966 |
|
SU179526A1 |
| Способ программирования траектории движения сельскохозяйственных агрегатов | 1976 |
|
SU751343A1 |