щения шаблона и зажимного механизма относительно корпуса вокруг общей оси от автономного привода, зажимной механизм связан с фиксатором телескопически.
Наличие телескопической связи между шповкой и зажиМНым мехащизмом обеспечивает непрерывность жесткой связи последнего с шаблоном в широком диапазоне его перемещений, а размыкание связи осуществляется только в крайнем иоложении зажимнсго механизма. Такая ко-нструкция фиксатора исключает влияние на качество гибки разного рода перекантовок и перекладок трубы в процессе гибки.
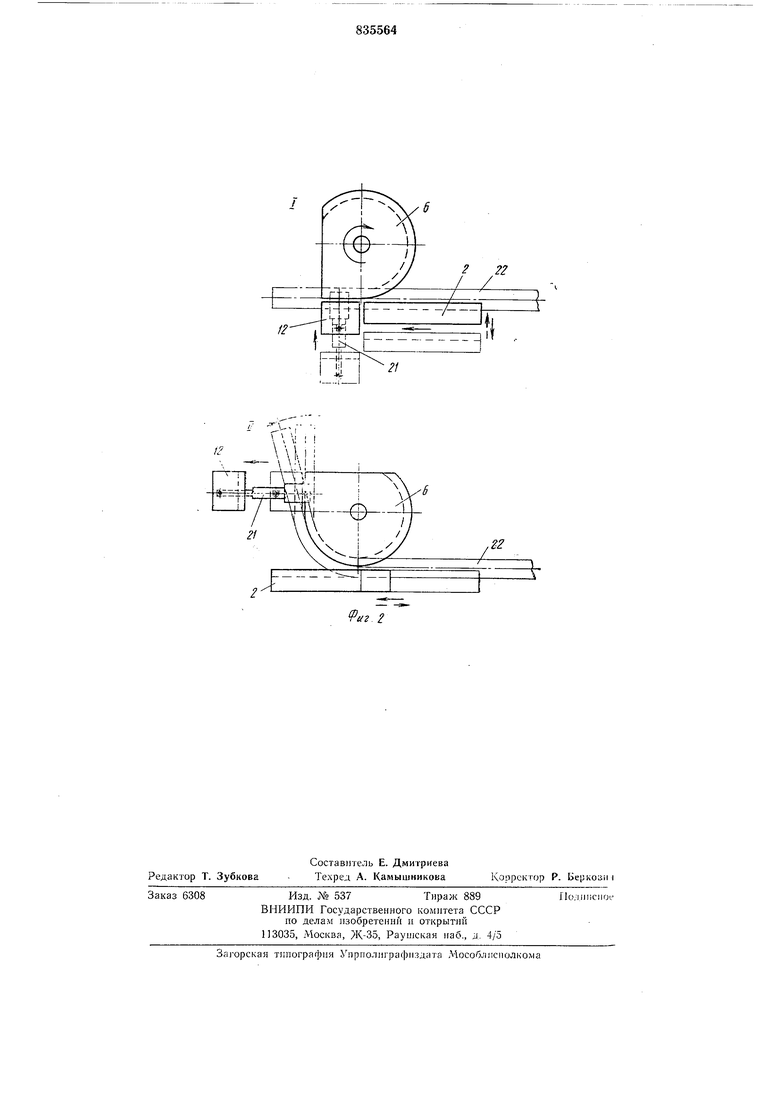
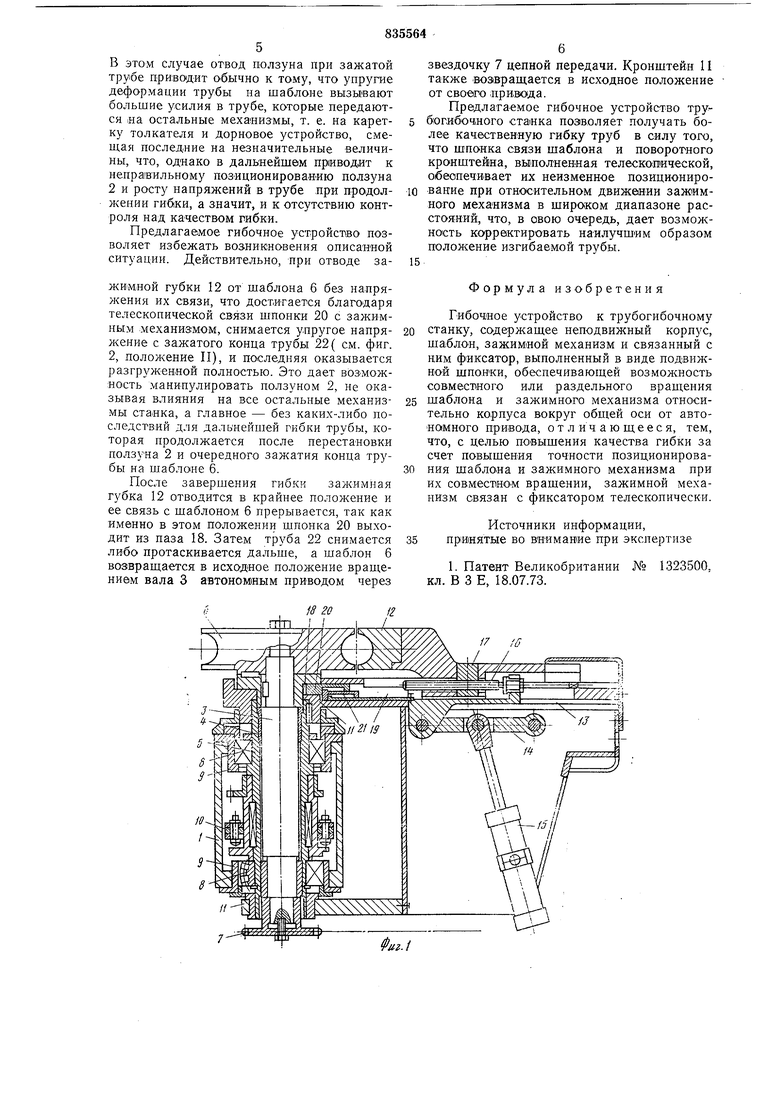
На фиг. 1 изображено предлагаемое гибочное устрОйство, общий вид, разрез; на фиг. 2 - то же, в двух различных позициях, поясняющих его работу.
Предлагаемое гибочное устройство трубогибочного станка состоит из неподвижного корпуса 1, пре.дставляющего собой станину, на которой, помимо гибочного устройства, размещены ползун 2, несущая каретка толкателя, дор|Новое устройство, а также соответствующие этим механизмам приводные средства (последние, кроиме ползуна 2 на чертеже не показаны). На одном конце вала 3, установленного в подшипниках скольжения 4 в полой втулке 5, закреплен шаблон 6, спрофилированный по диаметру сгибаемой трубы. На другом конце вала 3 установлена звездочка 7 цепной передачи от силового привода. Полая втулка 5 установлена с возможностью вращения в подшипнг-жах 8, В свою очередь размещеиных в стаканах 9 корпуса 1. На втулке 5 укреплена через шпонку ступица звездочки 10 цепной передачи от силового привода, автономного от указанного. На конце 5, примыкающей к шаблону 6, по горизонтальной плоскости разъема вплотную укреплен кронштейн 11, несущий зажимной механизм, который образован профилированной зажимной губкой 12, установленной по.: вижпо относительно кронштейна 11 в направляющих 13. Привод губки 12 выполнен в виде нары «ломаюшихся рычагов 14, связанных с гидроцилиндром 15. Настроечное перемещение губки 12 в направляющ.их 13 осуществляется с помощью винта 16, установленного в резьбовом отверстии гайки 17. По плоскости разъема шаблона 6 и кро-нштейиа 11 выполнен потайной паз 18, перекрываюншй обе указанные детали и продолженный в кронцгтейне И в виде направляющей 19. В последней установлена подвижная ипюнка 20, которая связана с одним из ломающи.хся рычагов 14 посредством телескопической связи, образоваННО.й совокупностью скользящих относительно друг друга пластин 21, каждая из которых снабжена упорами, взаимодействующими периодически с аналогичными упорами другой пластины так, как это показано иа фиг. 1. С помощью этой телескопической связи, которая может вклктчать в себя любое число пластин 21, шпонка 20 В1водится и выводится из потайного паза 18 в крайних положен и ях зажимной губки 12. В промежуточных положепиях
последняя «е воздействует иа шпонку 20. На прилагаемых к описанию чертежах обрабатываемое изделие (труба) обозначена позицией 22.
Гибочное устройство работает следуюшим образом. Трубу 22 закладывают в трубогибочный станок таким образом, что она ложнтся в профилированные части шаблона 6 и за кимной губкн 12 зажимного меха низма. Ползун 2 устанавливают в положепие, обеспечивающее дальнейшее сопровождение трубы 22 при ее движен.-ги во время наматывания иа шаблон 6 (см. фиг. 2, положение I). Несущая каретка толка-теля и дорновое зстройство также устанавлнваются в исходное положение, соответс1Бующеё известной функции каждого. Затем зажимную трубку 12 перемещают по направляющим 13 кронштейна 11 посредством приведения в действие гидроцилиндра 15, который передает развиваемое в нем усилие иа губку 12 через пару «ло-маюшихся рычагов 14. Предварительно подстроечное движение губки 12 осушествляют винтом 16, что онределяется в конечном итоге диаметром изгибаемой трубы. Одновременио с движением зажимной губки 12 перемещается и шпонка 20 по собственным направляющим 19. Она толкается в направлении потайного паз 18, перекрывающего разъем между шаблоном 6 и кронштейнам И, подвижными одна относительно другой, пластинами 21, в совокупности образующих телескопическую связь между шпонкой 20 и зажимной губкой 12. После того, как шпонка 20 введена в паз
18 (см. фиг. 2, положение I, сплошные линии), в действие приводится автономный привод поворота кронштейна 11, передающий свое усилие через звездочку 10, размещенную на полой втулке 5, иа кронштейн
11, а далее через шнонку 20 и и а П1аблон 6. Таким образом обеспечивается синхронное движение шаблона 6 и крошптейна 11 в технологическом процессе гибки трубы 22. При гибке трубы, на одном из промежуточных
этапов, часто возникает необходимость выполнения качественного гиба. В этом случае зажимную губку 12 отводят от Н1аблона 6 иа расстояние, превышающее длину шпонки 20, т. е. 40-50 мм, но связь этих
элементов не прерывается благодаря тому, что телескопическая связь передает усилие на 1инонку 20 только при крайних положениях зажимной губки 12.
Далее при достижении изгиба трубы 22
на 90°
иногда возникает иеооходимость
дальнейшей гибки, т. е. на угол, превышающий 90°. В этом случае необходимо осупюствить перехват трубы 22 ползуном 2, т. е. перевести его назад под трубу, так как в ироцессе гибки он выходит от контакта с ней.
В этом случае отвод ползуна при зажатой труое приводит обычно к тому, что упругие деформации трубы па шаблоне вызывают большие усилия в трубе, которые передаются «а остальные механизмы, т. е. на каретку толкателя и дорновое устройство, смещая последние на незначительные величины, что, однако в дальнейшем приводит к неправильному поЗИционировайию ползуна 2 и росту напряжений в трубе при продолжении гибки, а значит, и к отсутствию контроля над качеством гибки.
Предлагаемое гибочное устройст1во позволяет избежать возникновения описанной ситуап.ии. Действительно, при отводе зажимной губки 12 от шаблона 6 без напряжения их связи, что достигается благодаря телескопической связи шпонки 20 с зажимпым механизмом, снимается упругое напряжение с зажатого конца трубы 22( см. фиг. 2, положение II), и последняя оказывается разгруженной полностью. Это дает воз-можность .манипулировать ползуном 2, не оказывая влияния на все остальные механизмы станка, а главное - без каких-либо последствий для дальпейшей гибки трубы, которая продолжается после перестаиовки ползуна 2 и очередного зажатия конца трубы на шаблоне 6.
После завершения гибки зажимная губка 12 отводится в крайнее положение и ее связь с шаблоном 6 прерывается, так как именно в этом положении шпонка 20 выходит из паза 18. Затем труба 22 снимается либо протаскивается дальше, а шаблон 6 возврашается в исходное положение вращением вала 3 автономным приводом через
i8 20
звездочку 7 цепной передачи. Кронштейн 11 также во3(вращается в исходное положение от своего лриБОда.
Предлагаемое гибочное устройство трубогибочного cTaiHKa позволяет получать более качественную гибку труб в силу того, что шпанка связи шаблона и поворотного кронштейна, выполненная телескостической, обеспечивает их неизменное позидионировакие при относительном движении заж1имного механизма в широком диапазоне расстояний, что, в овою очередь, дает возможность корректировать наилучшим образом положение изгибаемой трубы.
15
Формула изобретения
Гибочное устройство к трубогнбочному станку, содержащее неподвижный корпус, шаблон, зажимной механизм и связанный с ним ф иксатор, выполненный в виде подвил ной шпонки, обеспечивающей возможность совместного или раздельного вращения шаблона и зажимного механизма относительно корпуса вокруг общей оси от автономного привода, отличающееся, тем, что, с целью повыщения качества гибки за счет повышения точности позиционирования шаблона и зажимного механизма при их совместном вращении, зажимной механизм связан с фиксатором телескопически.
Источники информации, принятые во внимание при экспертизе
1. Патент Великобритании Л 1323500, кл. В 3 Е, 18.07.73.
Фа1.{
| название | год | авторы | номер документа |
|---|---|---|---|
| Трубогибочный станок | 1979 |
|
SU837471A1 |
| Трубогибочный комплекс | 1987 |
|
SU1470389A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ТРУБ | 1990 |
|
RU2044585C1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ И ЗАЖИМА ТРУБ | 1992 |
|
RU2043803C1 |
| Трубогибочный станок | 1984 |
|
SU1274802A1 |
| Трубогибочная машина | 1986 |
|
SU1433548A1 |
| Узел поворота с механизмом зажима трубы трубогибочной машины | 1987 |
|
SU1523217A1 |
| Гибочная головка к трубогибочному станку с программным управлением | 1976 |
|
SU633638A1 |
| Гибочный механизм трубогибочного станка | 1976 |
|
SU770607A1 |
| Трубогибочная машина | 1988 |
|
SU1602593A1 |