Изобретение относится к обработке металлов давлением, в частности к тру богибочным машинам ротационного типа с поворотным гибочным суппортом, и может быть использовано в различных отраслях машиностроения.
Цель изобретения - повьшение надежности мащины.
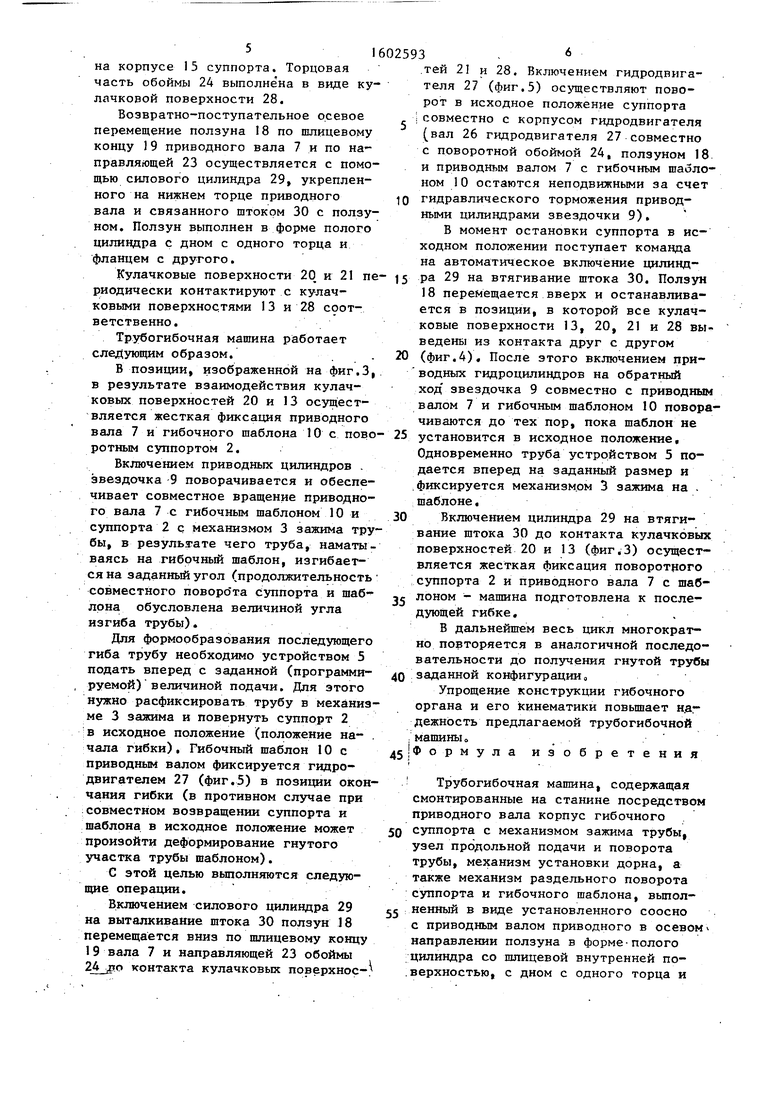
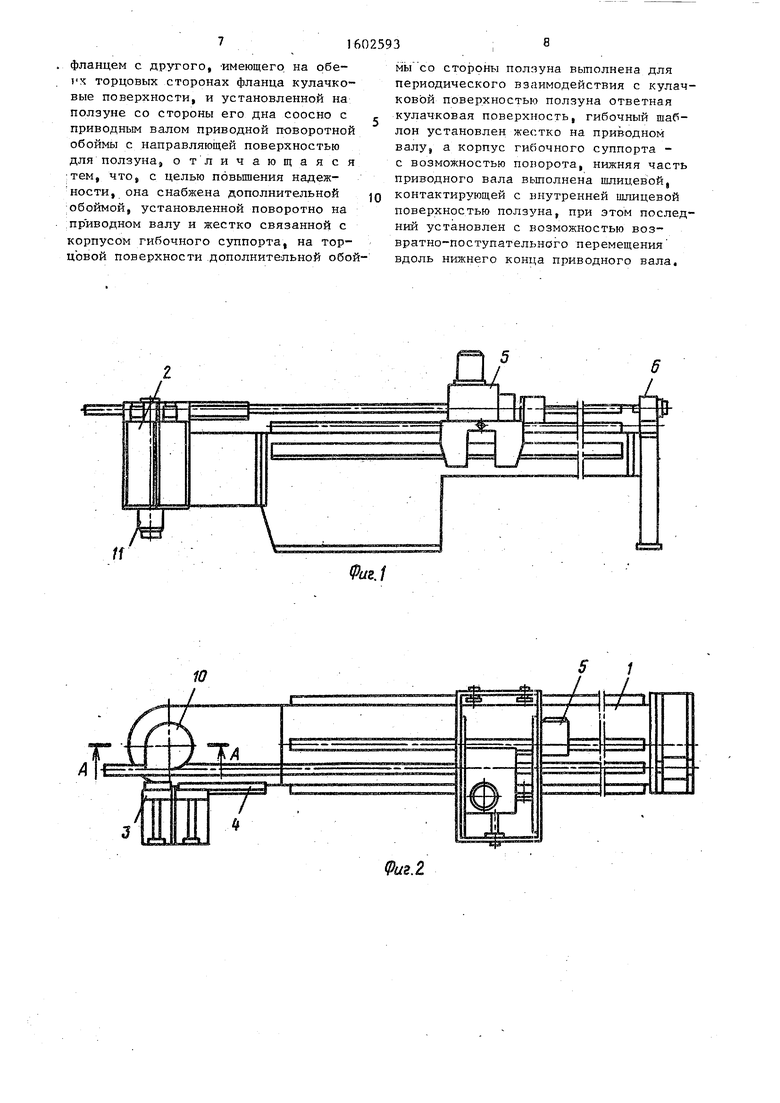
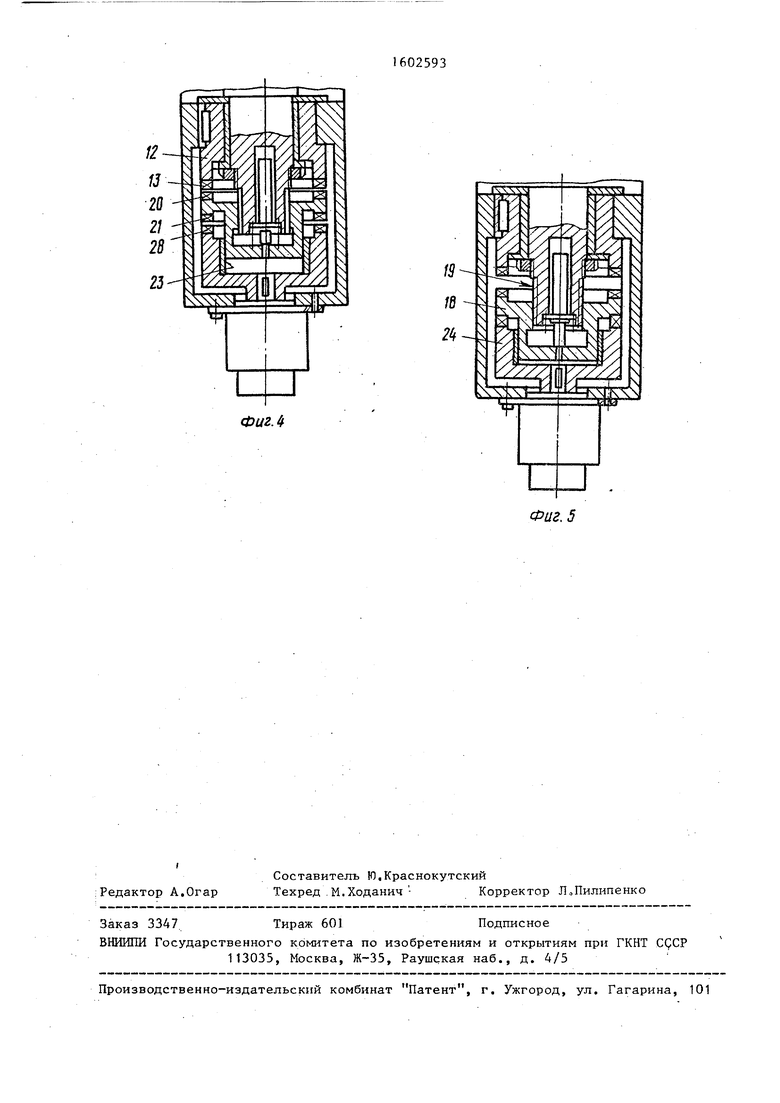
На фиг,1 изображена трубогибочная машина, внешний вид; на фиг.2 - то . же, вид в планеJ на фиг.З - разрез А-А на фиг;2 (положение гибочного органа, при котором гибочный шаблон, приводной вал и поворотный гибочный суппорт жестко соединены друг с другом - машина находится в исходной позиции перед гибкой); на фиг.4 - гибочный орган,в положении, при тором приводной вал с гибочным шаблоном разъединен с поворотным суппортом, в позиции окончания гибки возможно осуществление поворота шаблна в исходную позицию при неподвижном суппорте; на фиг.5 - гибочный орган в положении, при котором приводной вал соединяется посредством ползуна с поворотной обоймой, в позиции окончания гибки возможно осуществление поворота суппорта в исходное положение при неподвижном приводном вале с шаблоном за счет по ворота корпуса гидродвигателя, жестк соединенного с суппортом.
Трубогибочная машина содержит смонтированные на станине 1 гибочный суппорт 2 с механизмом 3 зажима трубы, механизм 4 поджима трубы, узел 5 продольной подачи и поворота трубы и механизм 6 установки дорна. Гибочный суппорт 2 смонтирован подвижно на приводном валу 7 на подшипнике скольжения, а сам вал 7 установлен поворотно в опорах станины на подшипниках 8 и кинематически связан, посредством звездочки 9 с силовой приводных гидроцилшздров (не показаны). В верхней части приводного вала жестко закреплен гибочный шаблон 10.
В нижней части поворотного гибочного суппорта 2 смонтирован механизм 11 раздельного поворота суппорта и гибочного шаблона, состоящий из дополнительной обоймы 12 с кулачковой по- верхностью 13 на ее торце, жестко связанной посредством шпонки 14 с корпусом 15 суппорта, и установленной поворотно относительно вала 7 посредством подшипника 16 на гладком нижнем участке 17 приводного вала 7, а также ползуна 18, подвижно в осевом направлении смонтированного на нижнем шлицевом конце 19 приводного вала 7. Ползун 18 снабжен кулачковыми поверхностями 20 и 21 и контактирует (по скользящей посадке) своей цилиндрической частью 22 с цилиндрической направляющей 23 поворотной обоймы 24, жестко посредством щпонки 25 закрепленной на валу 26 гидродвигателя 27, жестко смонтированного,в свою очередь
на корпусе 15 суппорта. Торцовая часть обоймы 24 выполнена в виде кулачковой поверхности 28.
Возвратно-поступательное осевое перемещение ползуна 18 по шлицевому концу 19 приводного вала 7 и по направляющей 23 осуществляется с помощью силового цилиндра 29, укрепленного на нижнем торце приводного вала и связанного штоком 30 с ползуном. Ползун выполнен в форме полого цилиндра с дном с одного торца и фланцем с другого.
10
.тей 21 и 28. Включением гидродвигателя 27 (фиг.5) осуществляют поворот в исходное положение суппорта совместно с корпусом гидродвигателя (вал 26 гидродвигателя 27 совместно с поворотной обоймой 24, ползуном 18 и приводным валом 7 с гибочным шаблоном 10 остаются неподвижными за счет гидравлического торможения приводными цилиндрами звездочки 9).
В момент остановки суппорта в исходном положении поступает команда на автоматическое включение цилиндКулачковые поверхности 2Q и 21 пе- 15 ра 29 на втягивание штока 30. Ползун
18 перемещается вверх и останавливариодически контактируют с кулачковыми поверхностями 13 и 28 соответственно.
Трубогибочная машина работает следующим образом.
В позиции, изображенной на фиг.З, в результате взаимодействия кулачковых поверхностей 20 и 13 осуществляется жесткая фиксация приводного вала 7 и гибочного шаблона 10 с поворотным суппортом 2.
Включением приводных цилиндров звездочка 9 поворачивается и обеспечивает совместное вращение приводного вала 7 с гибочным шаблоном 10 и суппорта 2 с механизмом 3 зажима трубы, в результате чего труба, наматываясь на гибочный шаблон, изгибается на заданный угол (продолжительность совместного поворота суппорта и шаблона обусловлена величиной угла изгиба трубы).
Для формообразования последующего гиба трубу необходимо устройством 5 подать вперед с заданной (программируемой) величиной подачи. Для зтого нуткно расфиксировать трубу в механизме 3 зажима и повернуть суппорт 2 :В исходное положение (положение начала гибки). Гибочный шаблон 10 с приводным валом фиксируется гидродвигателем 27 (фиг.5) в позиции окончания гибки (в противном случае при совместном возвращении суппорта и шаблона в исходное положение может произойти деформирование гнутого участка трубы шаблоном).
С этой целью выполняются следующие операции.
Включением силового цилиндра 29 на выталкивание штока 30 ползун 18 перемещается вниз по шлицевому концу 19 вала 7 и направляющей 23 обоймы 2Ajno контакта кулачковых поверхнос20
25
30
35
40
45
ется в позиции, в которой все кулачковые поверхности 13, 20, 21 и 28 выведены из контакта друг с другом (фиг.4). После этого включением приводных гидроцилиндров на обратный ход звездочка 9 совместно с приводным валом 7 и гибочным шаблоном 10 повора чиваются до тех пор, пока шаблон не установится в исходное положение. Одновременно труба устройством 5 подается вперед на заданный размер и фиксируется механизмом 3 зажима на . шаблоне.
Включением цилиндра 29 на втягивание штока 30 до контакта кулачковых поверхностей 20 и 13 (фиг.З) осуществляется жесткая фиксация поворотного суппорта 2 и приводного вала 7 с шаблоном - машина подготовлена к последующей гибке.,
В дальнейшем весь цикл многократно повторяется в аналогичной последовательности до получения гнутой трубы заданной конфигурации
Упрощение конструкции гибочного органа и его кинематики повьш1ает наг дежность предлагаемой трубогибочной .машиныо
{формула изобретения
Трубогибочная машина, содержащая смонтированные на станине посредством приводного вала корпус гибочного 50 суппорта с механизмом зажима трубы, узел продольной подачи и поворота трубы, механизм установки дорна, а также механизм раздельного поворота суппорта и гибочного шаблона, вьшол- ненный в виде установленного соосно с приводным валом приводного в осевом направлении ползуна в форме-полого цилиндра со шлицевой внутренней поверхностью, с дном с одного торца и
55
1602593
0
.тей 21 и 28. Включением гидродвигателя 27 (фиг.5) осуществляют поворот в исходное положение суппорта совместно с корпусом гидродвигателя (вал 26 гидродвигателя 27 совместно с поворотной обоймой 24, ползуном 18 и приводным валом 7 с гибочным шаблоном 10 остаются неподвижными за счет гидравлического торможения приводными цилиндрами звездочки 9).
В момент остановки суппорта в исходном положении поступает команда на автоматическое включение цилинд5 ра 29 на втягивание штока 30. Ползун
0
5
0
5
0
5
ется в позиции, в которой все кулачковые поверхности 13, 20, 21 и 28 выведены из контакта друг с другом (фиг.4). После этого включением приводных гидроцилиндров на обратный ход звездочка 9 совместно с приводным валом 7 и гибочным шаблоном 10 поворачиваются до тех пор, пока шаблон не установится в исходное положение. Одновременно труба устройством 5 подается вперед на заданный размер и фиксируется механизмом 3 зажима на . шаблоне.
Включением цилиндра 29 на втягивание штока 30 до контакта кулачковых поверхностей 20 и 13 (фиг.З) осуществляется жесткая фиксация поворотного суппорта 2 и приводного вала 7 с шаблоном - машина подготовлена к последующей гибке.,
В дальнейшем весь цикл многократно повторяется в аналогичной последовательности до получения гнутой трубы заданной конфигурации
Упрощение конструкции гибочного органа и его кинематики повьш1ает наг дежность предлагаемой трубогибочной .машиныо
{формула изобретения
Трубогибочная машина, содержащая смонтированные на станине посредством приводного вала корпус гибочного 50 суппорта с механизмом зажима трубы, узел продольной подачи и поворота трубы, механизм установки дорна, а также механизм раздельного поворота суппорта и гибочного шаблона, вьшол- ненный в виде установленного соосно с приводным валом приводного в осевом направлении ползуна в форме-полого цилиндра со шлицевой внутренней поверхностью, с дном с одного торца и
55
фланцем с другого, «меющего на обеих торцовых сторонах фланца кулачковые поверхности, и установленной на ползуне со стороны его дна соосно с приводным валом приводной поворотной обоймы с направляющей поверхностью для ползуна, отличающаяся :тем, что, с целью повьппения надеж- ности, она снабжена дополнительной :обоймой, установленной поворотно на приводном валу и жестко связанной с корпусом гибочного суппорта, на торцовой поверхности дополнительной обой
мы со стороны ползуна вьтолнена для периодического взаимодействия с кулачковой поверхностью ползуна ответная кулачковая поверхность, гибочный шаблон установлен жестко на приводном валу, а корпус гибочного суппорта - с возможностью попорота, нижняя часть приводного вала вьтолнена шлицевой, контактирующей с внутренней шлицевой поверхностью ползуна, при этом последний установлен с возможностью возвратно-поступательного перемещения вдоль нижнего конца приводного вала.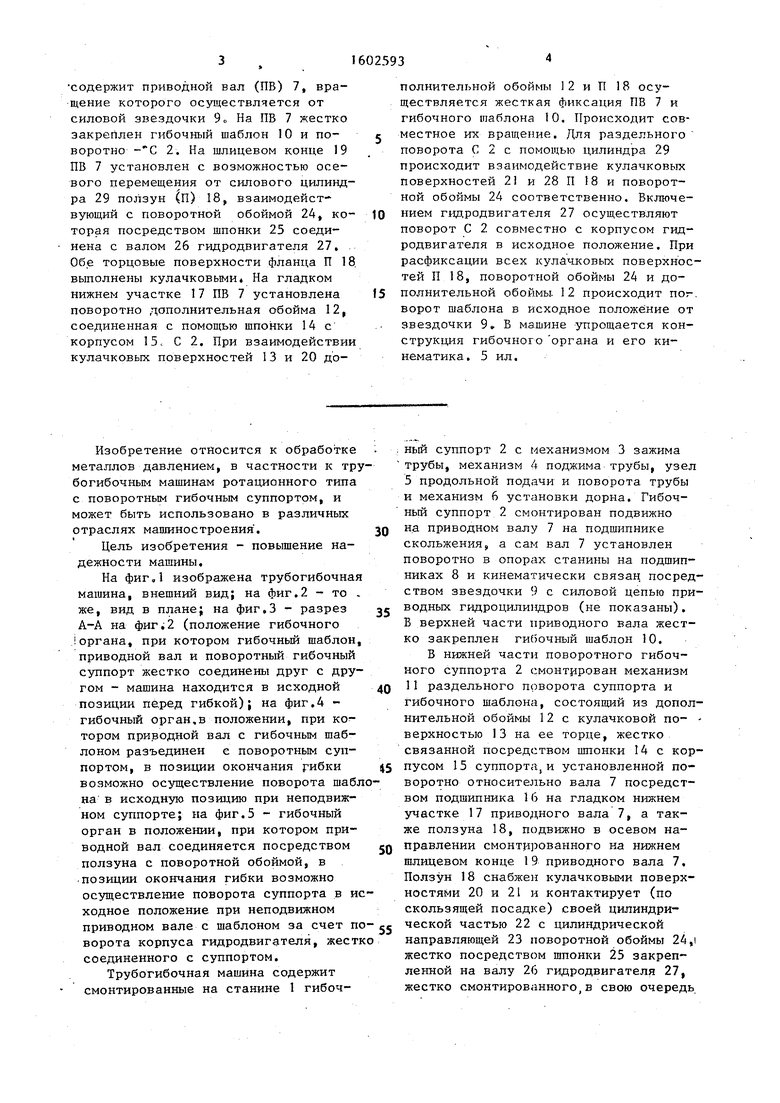
| название | год | авторы | номер документа |
|---|---|---|---|
| Трубогибочная машина | 1986 |
|
SU1433548A1 |
| Узел поворота с механизмом зажима трубы трубогибочной машины | 1987 |
|
SU1523217A1 |
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
| Устройство для фиксации сменных гибочных шаблонов на трубогибочном станке | 1988 |
|
SU1648596A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ И ЗАЖИМА ТРУБ | 1992 |
|
RU2043803C1 |
| Трубогибочная машина | 1986 |
|
SU1461559A1 |
| Установка для изготовления пакетов экономайзеров | 1988 |
|
SU1590298A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ СЛОЖНОЙ ФОРМЫ ИЗ ДЛИННОМЕРНЫХ ТРУБНЫХ ПЛЕТЕЙ И ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2038886C1 |
| Станок для подгибки труб в панелях | 1978 |
|
SU729907A2 |
Изобретение относится к обработке металлов давлением, в частности к трубогибочным машинам ротационного типа с поворотным гибочным суппортом (С). Цель изобретения - повышение надежности устройства. Машина включает механизм раздельного поворота С 2 и гибочного шаблона 10. Он содержит приводной вал (ПВ) 7, вращение которого осуществляется от силовой звездочки 9. На ПВ 7 жестко закреплен гибочный шаблон 10 и поворотно-С 2. На шлицевом конце 19 ПВ 7 установлен с возможностью осевого перемещения от силового цилиндра 29 ползун (П) 18, взаимодействующий с поворотной обоймой 24, которая посредством шпонки 25 соединена с валом 26 гидродвигателя 27. Обе торцовые поверхности фланца П 18 выполнены кулачковыми. На гладком нижнем участке 17 ПВ 7 установлена поворотно дополнительная обойма 12, соединенная с помощью шпонки 14 с корпусом 15 С 2. При взаимодействии кулачковых поверхностей 13 и 20 дополнительной обоймы 12 и П 18 осуществляется жесткая фиксация ПВ 7 и гибочного шаблона 10. Происходит совместное их вращение. Для раздельного поворота С 2 с помощью цилиндра 29 происходит взаимодействие кулачковых поверхностей 21 и 28 П 18 и поворотной обоймы 24 соответственно. Включением гидродвигателя 27 осуществляют поворот С 2 совместно с корпусом гидродвигателя в исходное положение. При расфиксации всех кулачковых поверхностей П 18, поворотной обоймы 24 и дополнительной обоймы 12 происходит поворот шаблона в исходное положение от звездочки 9. В машине упрощается конструкция гибочного органа и его кинематика. 3 ил.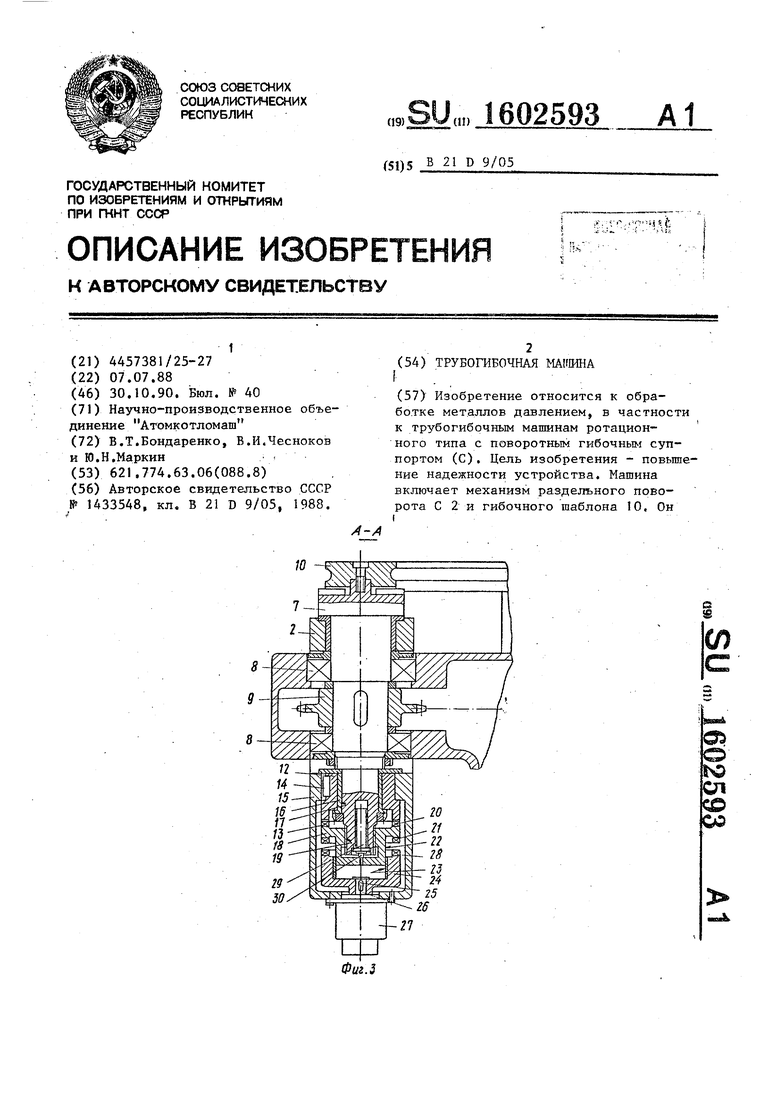
23
ФцгЛ
Фаг. 5
| Трубогибочная машина | 1986 |
|
SU1433548A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
