Изобретение относится к вспомогательному оборудованию кузнечно-прессовых цехов, а именно к конструкциям манипуляторов.
Известен манипулятор к прессу, содержащий тележку со смонтированным на ней с возможностью вертикального перемещение хоботом с захватом, а также механизм ориентации хобота относительно оси пресса в виде щупа, установленного на хоботе, и контактирующего с ним фиксатора с профильной поверхностью 1.
Недостатками известного манипулятора являются сложность его конструкции и ненадежность в работе, что является следствием сложной конструкции механизма ориентации хобота относительно оси пресса, представляющего собой систему электроконтактов, контактирующих с щупом и электрически связанных с системой управления манипулятором.
Цель изобретения - упрощение конструкции, повыщение надежности в работе.
Для этого в манипуляторе к прессу, содержащем тележку со смонтированным на ней с возможностью вертикального перемещения хоботом с захватом, а также механизм ориентации хобота относительно оси пресса в виде щупа, установленного на хоботе, и контактирующего с ним фиксатора с профильной поверхностью, щуп механизма ориентации хобота относительно оси пресса выполнен в виде жестко закрепленного на хоботе выступа цилиндрической формы, а контактирующий с ним фиксатор Зстановлен в смонтированных на подвижной траверсе пресса посредством кронштей1га направляющих и подпружинен относительно них, при этом профильная поверхность фиксатора выполнена П-образной формы, участки боковых поверхностей которой со стороны выступа хобота выполнены наклонными.
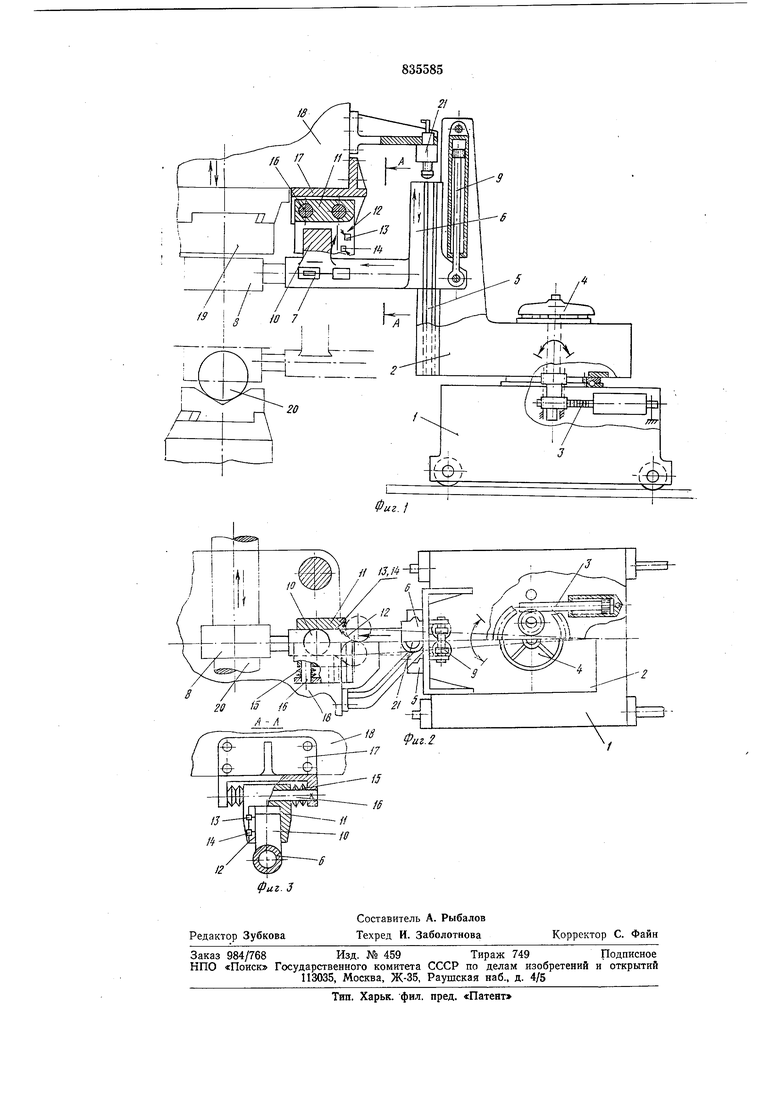
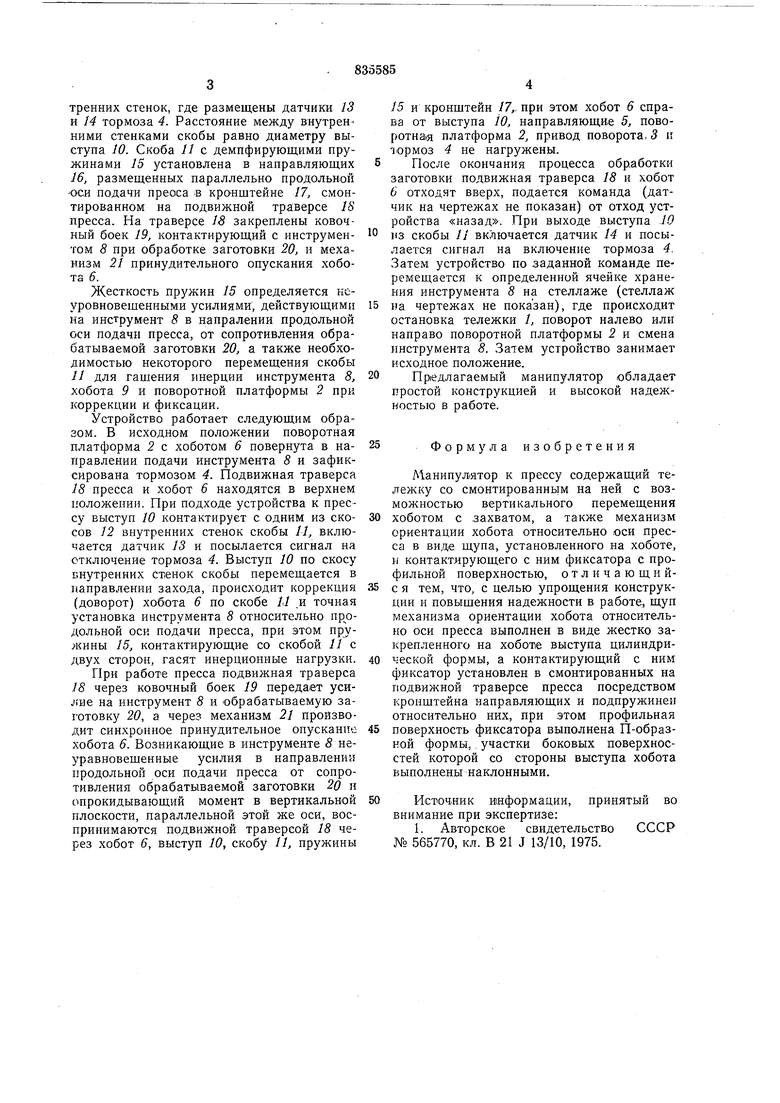
На фиг. I изображен предлагаемый манипулятор к прессу, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - сечение А-А фиг. 1.
Манипулятор к прессу содержит смонтированную на тележке / поворотную платформу 2 с приводом 3 поворота и тормозом 4, и установленный в вертикальных направляющих 5 платформы 2 хобот 6 с захватом / инструмента 8 (на чертежах показан условно), например, топоров, уголков, пережимок и полуовалов. Хобот 6 связан с приводом 9 подъема, установленным на поворотной платформе 2. Хобот 6 снабжен выступом 10, служащим для фиксации со скобой //. Скоба // в направлении захода выступа 10 выполнена со скосами 12 внутренних стенок, где размещены датчики 13 и 14 тормоза 4. Расстояние между внутренними стенками скобы равно диаметру выступа 10. Скоба // с демпфирующими пружинами 15 установлена в направляющих 16, размещенных параллельно продольной оси подачи преоса в кранщтейне 17, смонтированном на подвижной траверсе 18 пресса. На траверсе 18 закреплены ковочный боек 19, контактирующий с инструментом 8 при обработке заготовки 20, и механизм 21 принудительного опускания хобота 6.
Жесткость пружин 15 определяется неуровновешенными усилиями, действующими на инструмент 8 в напралении продольной оси подачи пресса, от сопротивления обрабатываемой заготовки 20, а также необходимостью некоторого перемещения скобы 11 для гащения инерции инструмента 8, хобота 9 и поворотной платформы 2 при коррекции и фиксации.
Устройство работает следующим образом. В исходном положении поворотная платформа 2 с хоботом 6 повернута в направлении подачи инструмента 8 и зафиксирована тормозом 4. Подвижная траверса 18 пресса и хобот 6 находятся в верхнем положении. При подходе устройства к прессу выступ 10 контактирует с одним из скосов 12 внутренних стенок скобы 11, включается датчик 13 и посылается сигнал на отключение тормоза 4. Выступ 10 по скосу внутренних стенок скобы перемещается в направлении захода, происходит коррекция (доворот) хобота 6 по скобе // .и точная установка инструмента 8 относительно пр одольной оси подачи пресса, при этом пружины 15, контактирующие со скобой 11 с двух сторон, гасят инерционные нагрузки.
При работе пресса подвижная траверса 18 через ковочный боек 19 передает усиjme на инструмент 8 и обрабатываемую заготовку 20, а через механизм 21 производит синхронное принудительное опускание хобота 6. Возникающие в ииструменте S неуравновещенные усилия в направлении продольной оси подачи пресса от сопротивления обрабатываемой заготовки 20 и опрокидывающий момент в вертикальной плоскости, параллельной этой же оси, воспринимаются подвижной траверсой 18 через хобот 6, выступ 10, скобу //, пружины
15 и кронщтейн 17, при этом хобот 6 справа от выступа 10, направляющие 5, поворотная платформа 2, привод поворота, 3 и тормоз 4 не нагружены. После окончания процесса обработки заготовки подвижная траверса 18 и хобот 6 отходят вверх, подается команда (датчик на чертежах не показан) от отход устройства «назад. При выходе выступа .10
из скобы // включается датчик 14 и посылается сигнал на включение тормоза 4. Затем устройство по заданной команде перемещается к определенной ячейке хранения инструмента 8 на стеллаже (стеллаж
на чертежах не показан), где происходит остановка тележки /, поворот налево или направо поворотной платформы 2 и смена инструмента 8. Затем устройство занимает исходное положение.
Предлагаемый манипулятор обладает простой конструкцией и высокой надежностью в работе.
Формула изобретения
Манипулятор к прессу содержащий тележку со смонтированньщ на ней с возможностью вертикального перемещения
хоботом с захватом, а также механизм ориентации хобота относительно оси пресса в виде щупа, установленного на хоботе, и контактирующего с ним фиксатора с профильной поверхностью, отличающийс я тем, что, с целью упрощения конструкции и повыщения надежности в работе, щуп тиеханизма ориентации хобота относительно оси пресса выполнен в виде жестко закрепленного на хоботе выступа цилиндрической формы, а контактирующий с ним фиксатор установлен в смонтированных на подвижной траверсе пресса посредством кронштейна направляющих и подпружинен относительно них, при этом профильная
поверхность фиксатора выполнена П-образной формы, участки боковых поверхносстей которой со стороны выступа хобота выполнены наклонными.
Источник информации, принятый во внимание при экспертизе:
1. Авторское свидетельство СССР № 565770, кл. В 21 J 13/10, 1975.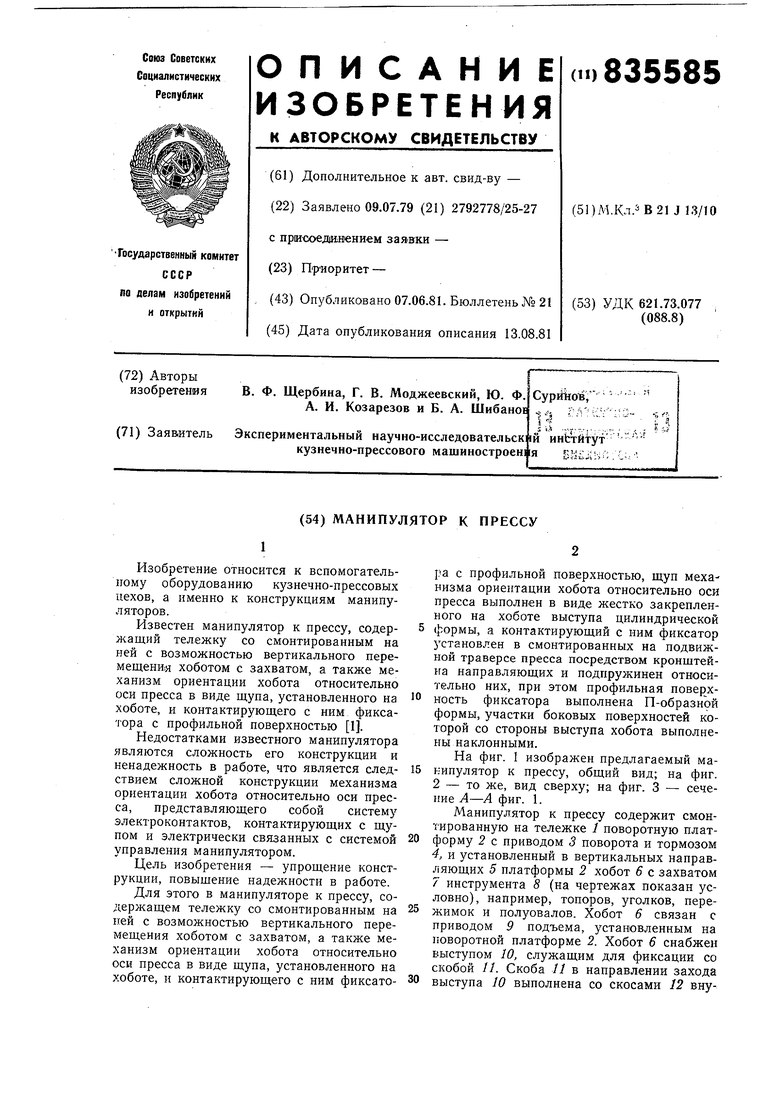
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплекс для обработки заготовок | 1989 |
|
SU1731371A1 |
| Ковочный манипулятор | 1991 |
|
SU1766569A1 |
| Ковочный манипулятор | 1975 |
|
SU564080A1 |
| МАНИПУЛЯТОР К КОВОЧНЫМ ВАЛЬЦАМ | 1973 |
|
SU388825A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| Хобот манипулятора | 1979 |
|
SU829307A1 |
| Устройство для подачи инструмента | 1979 |
|
SU852427A1 |
| Ковочный комплекс | 1991 |
|
SU1787639A1 |
| Клещевой захват ковочного манипулятора | 1983 |
|
SU1134275A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОРБ;^К-^ | 1972 |
|
SU350560A1 |