1
Изобретение относится к обработке металлов давлением, в частности к производству многоколенных змеевиков из трубных заготовок большой длины с эонсшьным нагревом.
Известен станок для гибки труб с минимальным радиусом гибки, содержащий подвижную каретку подачи, нагревательное устройство и поворотную гибочную головку с зажимом для трубы l
Недостатком станка является невозможность гибки змеевика целиком из трубных заготовок большой длины. Он приспособлен только для гибки элементов, из которых впоследствии сваркой встык собирают змеевик. Этот недостаток обусловлен конструкцией зажима, который не позволяет снять со draHKa согнутый элемент, если на нем «делано более двух погибов.
Известен также станок для гибки многоколенных змеевиков, содержащий размещенные на станине подакщую каретку , перемещающуюся вдоль оси труба, нагревательное устройство, поворотную вокруг вертикальной оси рабочую головку с поворотным суппортом и зажимом для трубы, состоящим из двух губок, а также направляющими для перемещения гибочной головки перпендикулЯрно оси трубы. В этом станке решена задача гибки многоколенных змеевиков из длинномерных труб с одного установа 2.
Недостаток данного станка - ограниченная номенклатура изготавливае1«ых изделий, так как не предусмотрено поперечное перемещение зажима относительно гибочной головки, и поэтому нельзя изменить радиус гибки.
Цель изобретения - расширение номенклатуры изготавливае1 их изделий.
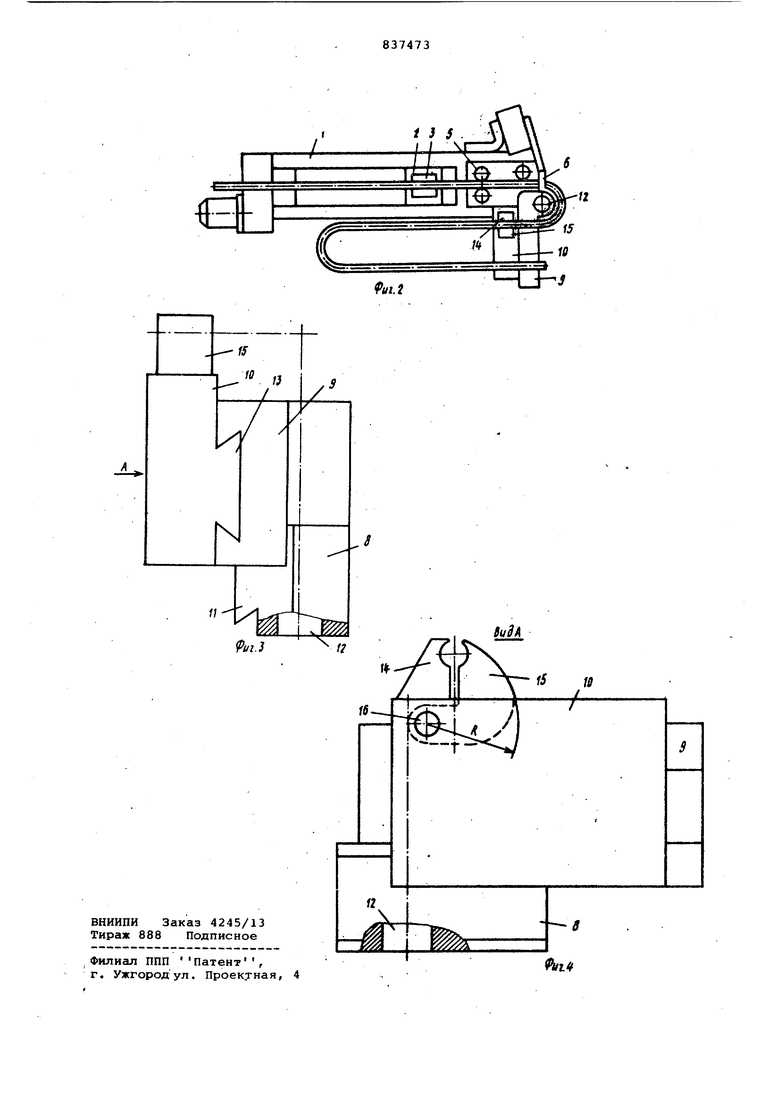
Указанная цель достигается тем, что в станке для гибки многоколенных змеевиков, содержащем размещенные на станине подающую каретку, перемещающуюся вдоль оси трубы, нагревательное устройство, поворотную вокруг вертикальной оси гибочную головку с пОво0 ротным суппортом и зажимом для трубы, состоящим из двух губок, а также направляющие для перемещения гибочной голов-ки перпендикулярно оси трубы, гибочнё я голавка снабжена выполненными на суппорте направляющими и установленным в них подвижным корпусом, а зажим для трубы смонтирован на подвижном корпусе, и губка его, расположенная ближе к вертикальной оси головки, закреплена неподвижно, а другая установлена с возможностью качания . На фиг. 1 показан станок, общий вид; на фиг. 2 - то же, общий вид сверху; на фиг. 3 - гибочная головка; на фиг. 4 - то же вид А на фиг. 3 На станине 1 станка алонтированы ПРОДОЛЬНО подвижная каретка 2 с зажи мом 3, перемещаемая приводом 4, направляющие ролики 5 и иагревательное устройство 6, сквозь которое проходи изгибаемая труба 7. Гибочная головка состоит из основания 8, суппорта 9 и корпуса 10 зажима для трубы. Основание 8 имеет направляющие 11, ориентированные перпендикулярно оси трубы В Ъсновании 8 смонтирована вертикаль ная ось 12, вокруг которой поворачивается суппорт 9, имекиций направляющие 13. По направляющим 13 перемещается 10 зажима для трубы. Зажим имеет неподвижную губку 14 и под вижную гуСку 15, которая принудитель но поворачивается вокруг оси 16, выполненной под губкой 14. Наружный контур губки 15 вписан в дугу, очерченную из центра от оси 16 радиусом R (фиг. 4). Устройство работает следующим образом. Изгибаемая труба 7 укладывается на станок, закрепляется в зажиме 3, опирается на ролики 5, проходит через нагревательное устройство 6 и закрепляется между губками 14 и 15 гибочной головки, которые в это время расположены соосно зажиму 3. Вклю чается нагрев, и привод 4 перемещает каретку 2, а с нею и трубу 7 вперед. Это вызывает поворот гибочной головки вокруг оси 12, и труба изгибается радиусом, заданным положением корпуса 10 зажима для тру&л и оси при пре варительной настройке станка, когда корпус 10 зажима для трубы перемещается по направляющим 13 и основание. 8 по направляющим 11. Когда поворот суппорта 9 вокруг оси 12 достигает заданной величины (в данном случае ISO), нагрев и подача выключаются, гиб колена закончен. Как видно из чертежа (фиг. 2), в этом положении губка 15 препятствует установочно перемещению змеевика вперед в положение, соответствующее следу1ад ему погибу. Поэтому недостаточно разжать губки 14 и 15, а надо еще и утопить губку 15 в корпус 10 зажима для трубы. Это дост 1гается поворотом губки 15 вокруг оси 16. После выполнения погиба змеевик подают вперед, гибочную головку возвращают в исходное положение при утопленной губке 15, потом поднимают губку 15 и закрепляют трубу 7. Цикл гибки очередного колена повторяется, как было описано выше. Годовой экономический эффект от применения одного станка составляет 44 тыс. руб. Формула изобретения Станок для гибки многоколенных змеевиков, содержащий размещенные на станине подающую каретку, переметающуюся вдоль оси трубы, нагревательное устройство, поворотную вокруг вертикальной оси гибочную головку с поворотным суппортом и зажимом для трубы, состоящим из ддух губок, а также направляющие для перемещения гибочной головки перпендикулярно оси трубы, отличающий ся тем, что, с целью расширения номенклатуры изготавливаемых изделий, гибочная головка снабжена выпалненнЕЛМи на суппорте направляющими и установленным в них подвижным корпусом, а зажим для трубы смонтирован на подвижном корпусе, и губка его, расположенная ближе к вертикальной оси головки, закреплена неподвижно, а другая установлена с возможностью качания. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 119775, кл. В 21 О 9/025, 1957. 2.Патент Великобритании № 1377045, кл. В 21 О 11/07, 1974.

| название | год | авторы | номер документа |
|---|---|---|---|
| ТРУБОГИБОЧНЫЙ СТАНОК | 2004 |
|
RU2270733C1 |
| Станок для гибки змеевиков | 1984 |
|
SU1207562A2 |
| Трубогибочный станок | 1977 |
|
SU764781A1 |
| СПОСОБ ГИБКИ ТРУБ И СТАНОК ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2010 |
|
RU2422229C1 |
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
| Станок для гибки змеевиков | 1979 |
|
SU854507A1 |
| СПОСОБ ГИБКИ ТРУБ И СТАНОК ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2015 |
|
RU2614975C1 |
| Способ гибки труб и станок для осуществления способа | 2020 |
|
RU2774676C2 |
| Станок для гибки змеевиков | 1985 |
|
SU1333437A2 |
| Станок для гибки змеевиков | 1986 |
|
SU1411075A1 |