(54) СТАНОК ДЛЯ ГИБКИ ЗМЕЕВИКОВ
I
Изобретение относится к трубогибочному оборудованию и может найти применение в различных отраслях машиностроения, в частности в энергомашиностроении для изготовления из трубных . плетей плоских змеевиков, используемых в теплообменных поверхностях парогенераторов.
Изобретение предназначено для решения технологических проблем трубо- . блочного производства, связанных с изготовлением крупногабаритных змеевиков из длинномерных трубных плетей длиной свыше 70 м с учетом автоматизации трудоемких операций перемещения .гнутой части змеевика в процессе гибки.
Известен станок для гибки змеевиков, содержащий смонтированную на станине поворотную на оси платформу, jo размещенную на ней гибочную головку с укрепленным на оси неразъемным шаблоном, перемещающуюся в направляющих платформы каретку, несущую гибочную
головку с установленным на оси разъемным шаблоном, а также механизм смыкания разъемного шаблона СОНедостатком данного станка является то, что в нем не механизировано перемещение изогнутого участка змеевика, а также сложность удержания на поворотной платформе изогнутой части формируемого змеевика.
Цель изобретения - обеспечение автоматизации перемещения изогнутого участка змеевика и повышения надежности удержания этого участка в процессе гибки последующих участков змеевика.
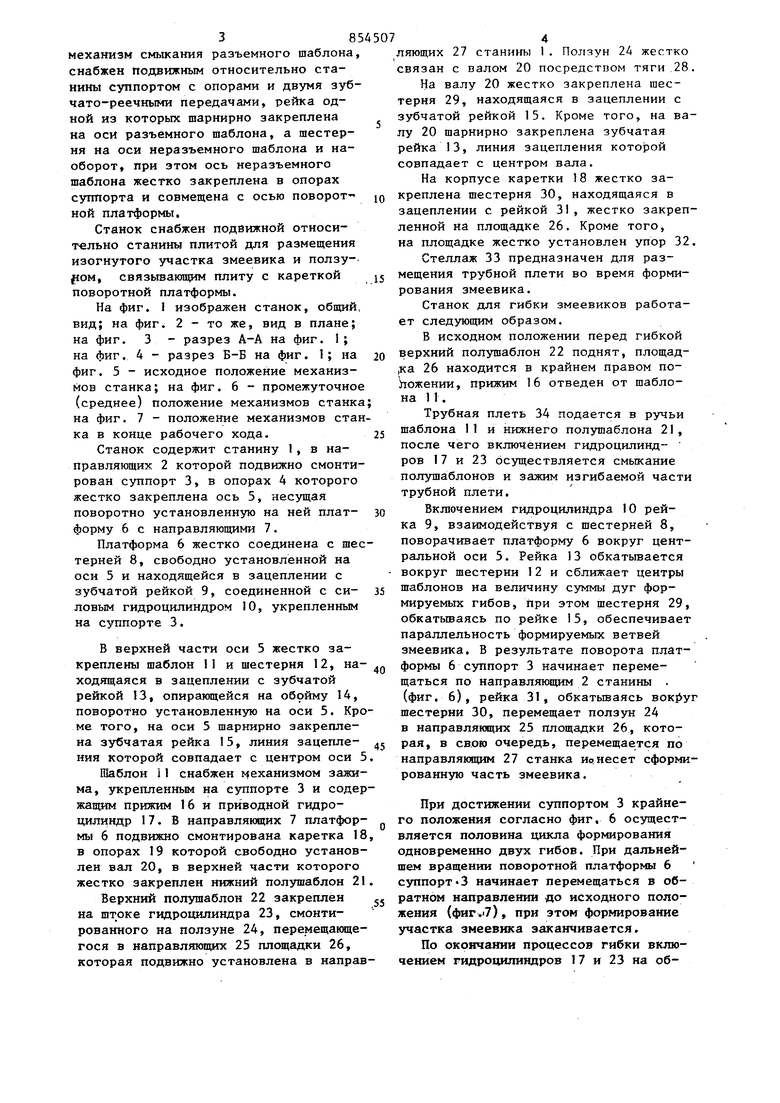
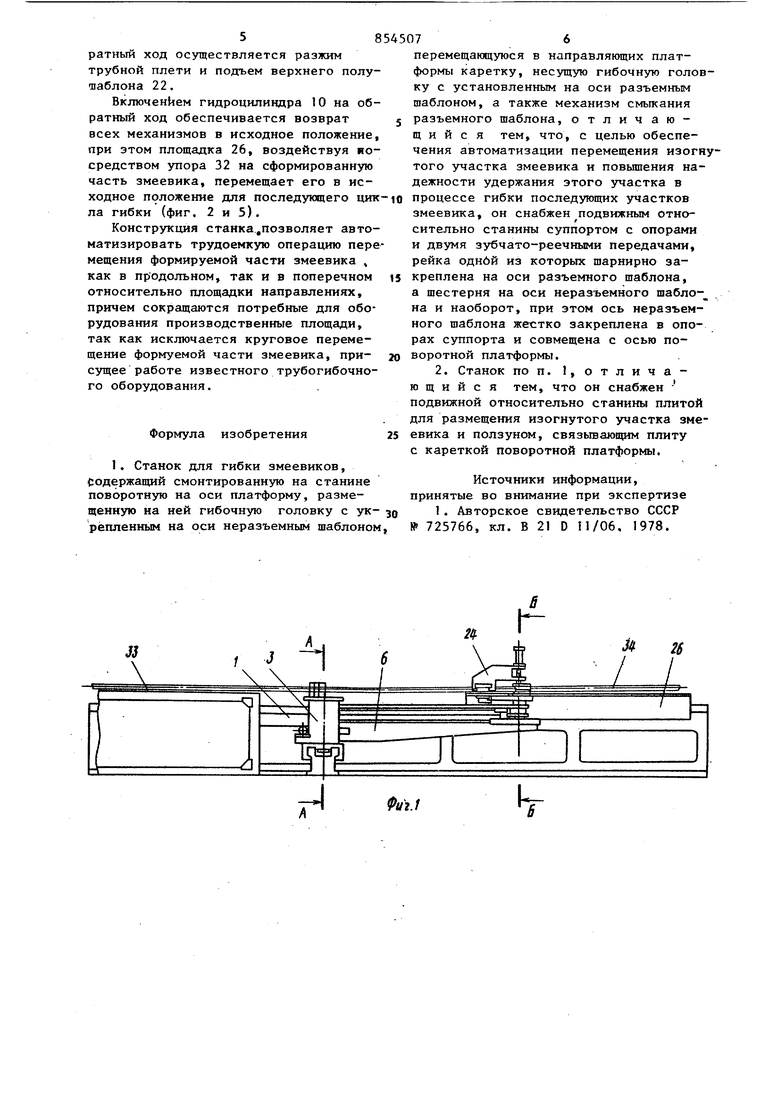
Цель достигается тем, что станок для гибки змеевиков, содержащий смонтированную на станине поворотную на оси платформуJ размещенную на ней гибочиую головку с укрепленным на оси неразъемным шаблоном, перемещающуюся в направляющих платформы каретку, несущую гибочную головку с установленным на оси разъемным шаблоном, а также 385 механизм смыкания разъемного шаблона, снабжен подвижным относительно станины суппортом с опорами и двумя зубчато-реечными передачами, рейка одной из которых шарнирно закреплена на оси разъемного шаблона, а шестерня на оси неразъемного шаблона и наоборот, при этом ось неразъемного шаблона жестко закреплена в опорах суппорта и совмещена с осъю поворотной платформы. Станок снабжен подвижной относительно станины плитой для размещения изогнутого участка змеевика и ползуром, связьгаающим плиту с кареткой поворотной платформы. На фиг. 1 изображен станок, общий, вид; на фиг. 2 - то же, вид в плане; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 1; на фиг. 5 - исходное положение механизмов станка; на фиг. 6 - промежуточное (среднее) положение механизмов станка на фиг. 7 - положение механизмов стан ка в конце рабочего хода. Станок содержит станину 1, в направляющих 2 которой подвижно смонтирован суппорт 3, в опорах 4 которого жестко закреплена ось 5, несущая поворотно установленную на ней платформу 6 с направляющими 7. Платформа 6 жестко соединена с шес терней 8, свободно установленной на оси 5 и находящейся в зацеплении с зубчатой рейкой 9, соединенной с силовым гидроцилиндром 10, укрепленным на суппорте 3. В верхней части оси 5 жестко закреплены шаблон 11 и шестерня 12, находящаяся в зацеплении с зубчатой рейкой 13, опирающейся на об9йму 14, поворотно установленную на оси 5. Кро ме того, на оси 5 шарнирно закреплена зубчатая рейка 15, линия зацепления которой совпадает с центром оси Шаблон i 1 снабжен г еханизмом зажи ма, укрепленным на суппорте 3 и содер жащим прижим 16 и приводной гидроцилиндр 17. В направляющих 7 платформы 6 подвижно смонтирована каретка 18 в опорах 19 которой свободно установлен вал 20, в верхней части которого жестко закреплен нижний полушаблон 2 Верхний полушаблон 22 закреплен на гидроцилиндра 23, смонтированного на ползуне 24, перемещающегося в направляющих 25 площадки 26, которая подвижно установлена в направ ляющих 27 станины 1. Ползун 24 жестко связан с валом 20 посредством тяги 28. На валу 20 жестко закреплена шестерня 29, находящаяся в зацеплении с зубчатой рейкой 15. Кроме того, на валу 20 шарнирно закреплена зубчатая рейка 13, линия зацепления которой совпадает с центром вала. На корпусе каретки 18 жестко закреплена шестерня 30, находящаяся в зацеплении с рейкой 31, жестко закрепленной на площадке 26. Кроме того, на площадке жестко установлен упор 32. Стеллаж 33 предназначен для размещения трубной плети во время формирования змеевика. Станок для гибки змеевиков работает следующим образом. В исходном положении перед гибкой верхний полушаблон 22 поднят, площад|Ка 26 находится в крайнем правом поУгожении, прижим 16 отведен от шаблона 1 1 . Трубная плеть 34 подается в ручьи шаблона 11 и нижнего полушаблона 21, после чего включением гидроцилиндров 17 и 23 осуществляется смыкание полушаблонов и зажим изгибаемой части трубной плети. Включением гидроцилиндра 10 рейка 9, взаимодействуя с шестерней 8, поворачивает платформу 6 вокруг центральной оси 5. Рейка 13 обкатывается вокруг шестерни 12 и сближает центры шаблонов на величину суммы дуг формируемых гибов. При этом щестерня 29, обкатьшаясь по рейке 15, обеспечивает параллельность формируемых ветвей змеевика. В результате поворота платформы 6 суппорт 3 начинает перемещаться по направляющим 2 станины . (фиг. 6), рейка 31 , обкатьшаясь шестерни 30, перемещает ползун 24 в направляющих 25 площадки 26, которая, в СВ.ОЮ очередь, перемещается по направлякщим 27 станка нанесет сформированную часть змеевика. При достижении суппортом 3 крайнего положения согласно фиг, 6 осуществляется половина цикла формирования одновременно двух гибов. При дальнейшем вращении поворотной платформы 6 суппорт«3 начинает перемещаться в обратном направлении до исходного положения (фиг. f при этом формирование участка змеевика заканчивается. По окончании процессов гибки включением гидроцилиндров 17 и 23 на обратный ход осуществляется разжим трубной плети и подъем верхнего полушаблона 22. Включением гидроцнлиндра 10 на обратный ход обеспечивается возврат всех механизмов в исходное положение при этом площадка 26, воздействуя носредством упора 32 на сформированную часть змеевика, перемещает его в исходное положение для последующего цик ла гибки (фиг. 2 и 5). Конструкция станка,позволяет автоматизировать трудоемкую операцию пере мещения формируемой части змеевика , как в продольном, так и в поперечном относительно площадки направлениях, причем сокращаются потребные для оборудования производственные площади, так как исключается круговое перемещение формуемой части змеевика, присущее работе известного трубогибочного оборудования. Формула изобретения 1. Станок для гибки змеевиков, Содержащий смонтированную на станине поворотную на оси платформу, размещенную на ней гибочную головку с укрёпленным на оси неразъемным шаблоном перемещающуюся в направляющих платформы каретку, несущую гибочную головку с установленным на оси разъемным шаблоном, а также механизм смыкания разъемного шаблона, отличающийся тем, что, с целью обеспечения автоматизации перемещения изогнутого участка змеевика и повышения надежности удержания этого участка в процессе гибки последующих участков змеевика, он снабжен подвижным относительно станины суппортом с опорами и двумя зубчато-реечными передачами, рейка однбй из которых шарнирно закреплена на оси разъемного шаблона, а шестерня на оси неразъемного шаблона и наоборот, при этом ось неразъемного шаблона жестко закреплена в опорах суппорта и совмещена с осью поворотной платформы. 2. Станок по п. 1, отличающий с я тем, что он снабжен подвижной относительно станины плитой для размещения изогнутого участка змеевика и ползуном, связывающим плиту с кареткой поворотной платформы. Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР 725766, кл. В 21 D 11/06, 1978.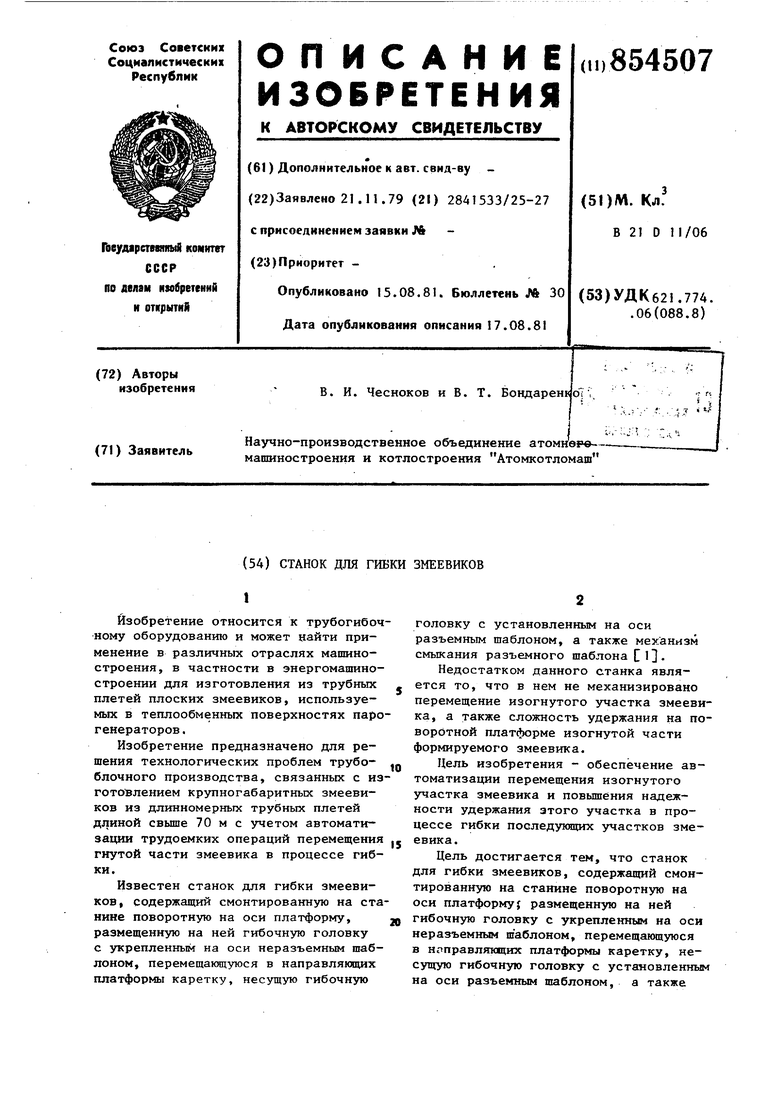
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
| Станок для гибки змеевиков | 1980 |
|
SU935162A1 |
| Станок для гибки змеевиков | 1985 |
|
SU1248692A1 |
| Станок для изготовления змеевиков | 1981 |
|
SU997905A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Станок для гибки змеевиков | 1985 |
|
SU1400711A1 |
| Станок для гибки змеевиков | 1986 |
|
SU1411075A1 |
| Станок для гибки змеевиков | 1985 |
|
SU1333437A2 |
| Станок для гибки змеевиков | 1984 |
|
SU1207562A2 |
| Станок для изготовления змеевиков | 1977 |
|
SU725766A1 |

26
