112
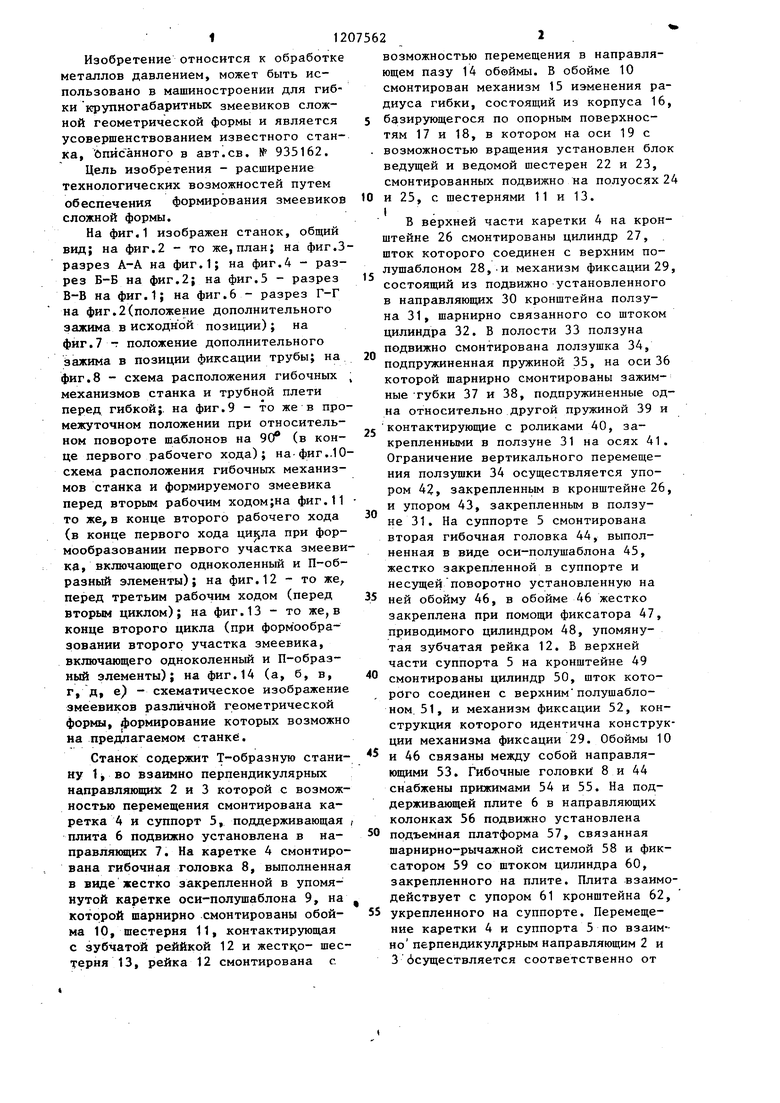
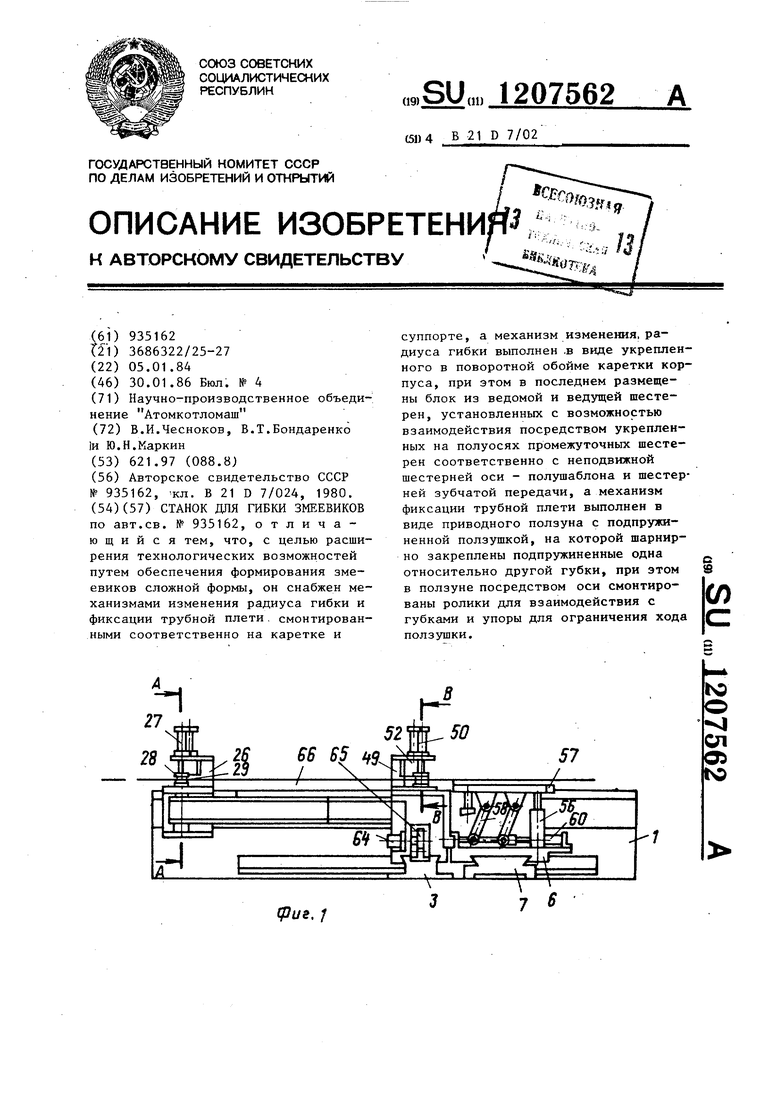
Изобретение относится к обработке металлов давлением, может быть использовано в машиностроении для гибки крупногабаритных змеевиков сложной геометрической формы и является усовершенствованием известного станка, Описанного в авт.св. № 935162.
Цель изобретения - расширение технологических возможностей путем обеспечения формирования змеевиков сложной формы.
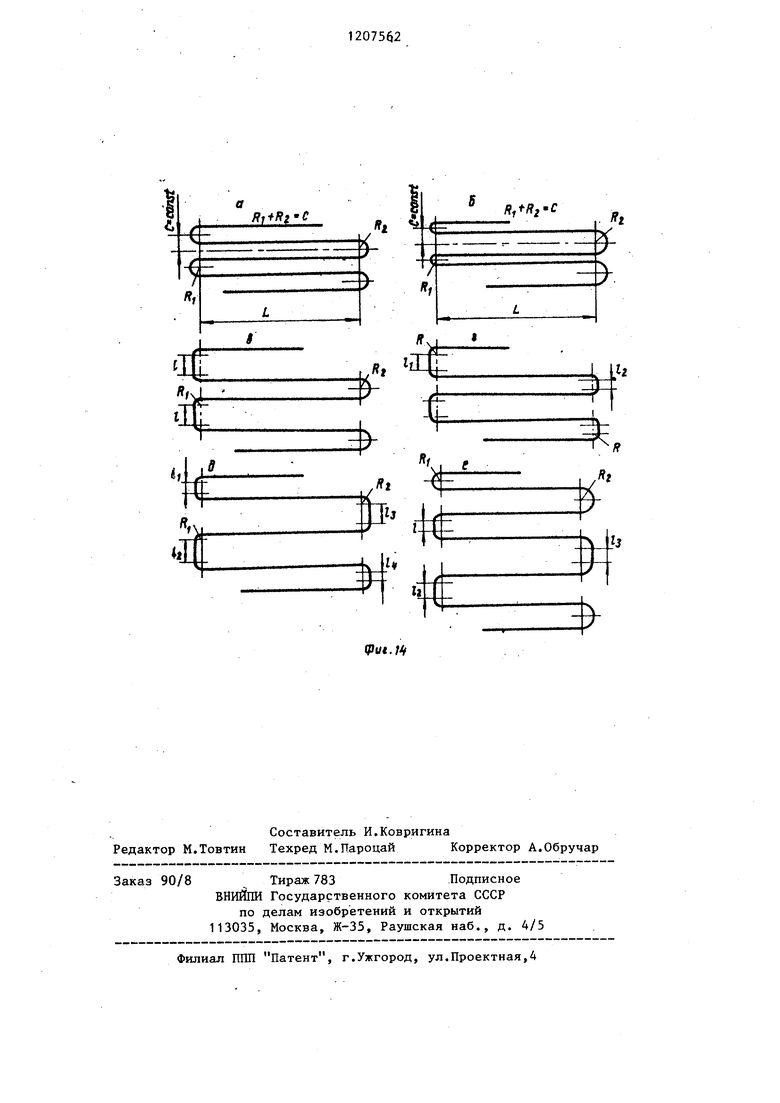
На фиг,1 изображен станок, общий вид; на фиг.2 - то же, план; на фиг.З разрез А-А на фиг.1; на фиг.4 - разрез Б-Б на фиг.2; на фиг.5 - разрез В-В на фиг.1; на фиг.6 - разрез Г-Г на фиг.2(положение дополнительного зажима в исходной позиции); на фиг.7 т положение дополнительного зажима в позиции фиксации трубы; на фиг.8 - схема расположения гибочных механизмов станка и трубной плети перед гибкой;, на фиг.9 - то же в промежуточном положении при относительном повороте шаблонов на 90 (в конце первого рабочего хода); на фиг..10 схема расположения гибочных механизмов станка и формируемого змеевика перед вторым рабочим ходом;на фиг.11 то же,в конце второго рабочего хода (в конце первого хода при формообразовании первого участка змеевика, включающего одноколенный и П-об- разный элементы); на фиг.12 - то же, перед третьим рабочим ходом (перед вторым циклом); на фиг.13 - то же, в конце второго цикла (при формообразовании второго участка змеевика, включающего одноколенный и П-образ- ный элементы); на фиг.14 (а, б, в, г, д, е) - схематическое изображение змеевиков различной геометрической формы, формирование которых возможно на предлагаемом станке.
Станок содержит Т-образную станину 1j во взаимно перпендикулярных направляющих 2 и 3 которой с возможностью перемещения смонтирована каретка А и суппорт 5, поддерживающая плита 6 подвижно установлена в на- правляницих 7. На каретке 4 смонтирована гибочная головка 8, выполненная в виде жестко закрепленной в упомянутой каретке оси-полушаблона 9, на которой шарнирно смонтированы обойма 10, шестерня 11, контактирующая с зубчатой реййкой 12 и жестк;о- шес- Терня 13, рейка 12 смонтирована с
5
0
5
возможностью перемещения в направляющем пазу 14 обеймы. В обойме 10 смонтирован механизм 15 изменения радиуса гибки, состоящий из корпуса 16, базирующегося по опорным поверхностям 17 и 18, в котором на оси 19 с возможностью вращения установлен блок ведущей и ведомой шестерен 22 и 23, смонтированных подвижно на полуосях 24 и 25, с шестернями 11 и 13.
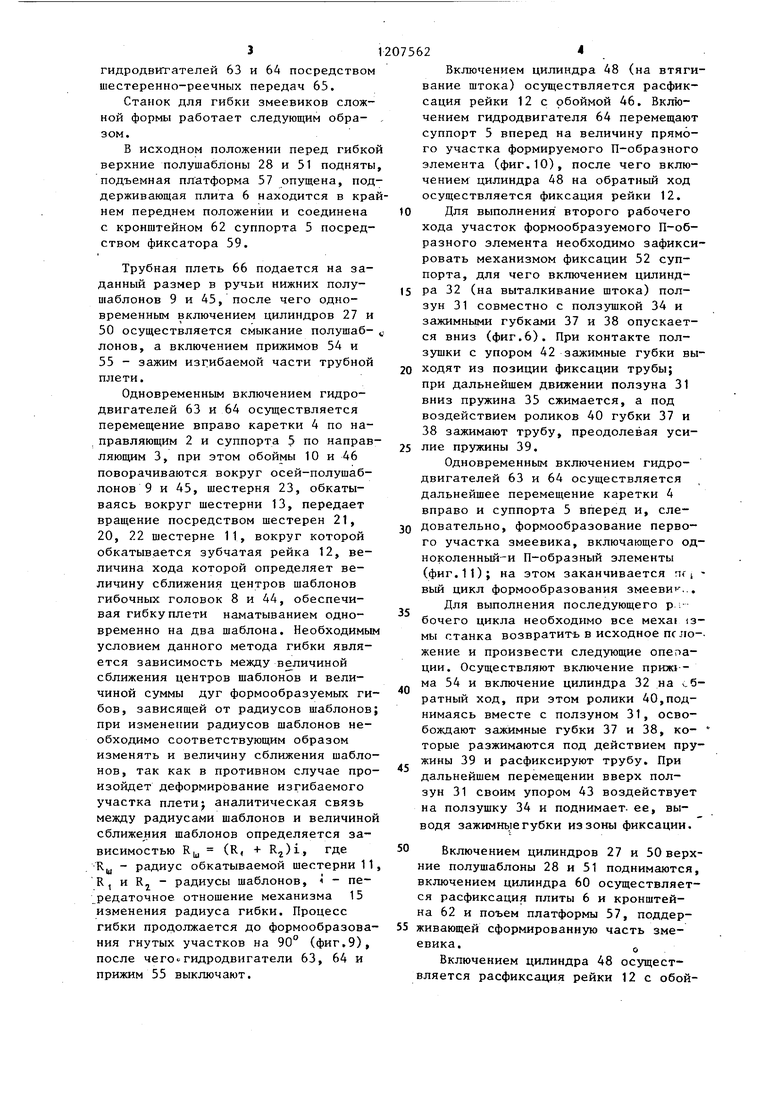
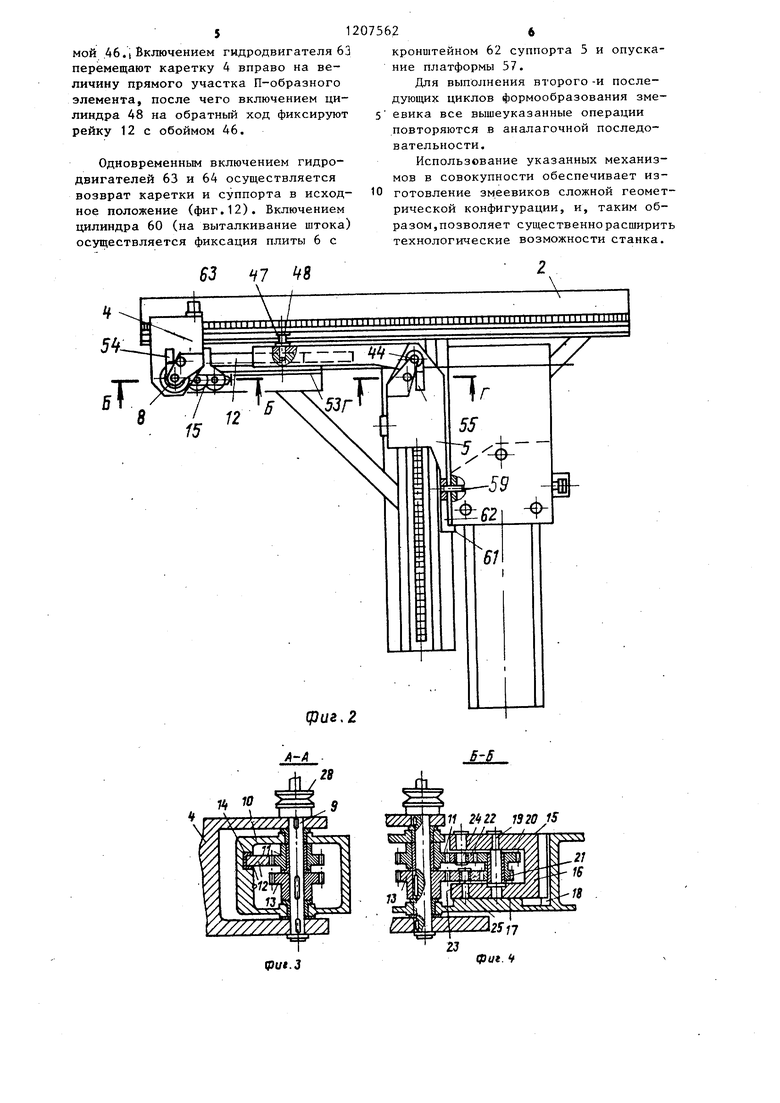
В верхней части каретки 4 на кронштейне 26 смонтированы цилиндр 27, шток которого соединен с верхним полушаблоном 28,.и механизм фиксации 29, состоящий из подвижно установленного в направляю1цих 30 кронштейна ползуна 31, шарнирно связанного со штоком цилиндра 32. В полости 33 ползуна подвижно смонтирована ползушка 34, подпружиненная пружиной 35, на оси 36 которой шарнирно смонтированы зажимные тубки 37 и 38, подпружиненные одна относительно другой пружиной 39 и контактирующие с роликами 40, за- крепленньми в ползуне 31 на осях 41. Ограничение вертикального перемещения ползушки 34 осуществляется упором 42, закрепленным в кронштейне 26, и упором 43, закрепленным в ползуне 31. На суппорте 5 смонтирована вторая гибочная головка 44, выполненная в виде оси-полушаблона 45, жестко закрепленной в суппорте и несущей поворотно установленную на ней обойму 46, в обойме 46 жестко закреплена при помощи фиксатора 47, приводимого цилиндром 48, упомянутая зубчатая рейка 12. В верхней части суппорта 5 на кронштейне 49 смонтированы цилиндр 50, шток кото- , рого соединен с верхним полушаблоном. 51, и механизм фиксации 52, конструкция которого идентична конструкции механизма фиксации 29. Обоймы 10 и 46 связаны между собой направляющими 53. Гибочные головкИ 8 и 44 снабжены прижимами 54 и 55. На поддерживающей плите 6 в направляющих колонках 56 подвижно установлена подъемная платформа 57, связанная шарнирно-рычажной системой 58 и фиксатором 59 со штоком цилиндра 60, закрепленного на плите. Плита взаимодействует с упором 61 кронштейна 62, укрепленного на суппорте. Перемещение каретки 4 и суппорта 5 по взаимно перпендикул;1рным направляющим 2 и 3 Осуществляется соответственно от
0
5
0
0
5
гидродвиггателей 63 и 64 посредством шестеренно-реечных передач 65.
Станок для гибки змеевиков сложной формы работает следующим обра- зом.
В исходном положении перед гибко верхние полушаблоны 28 и 51 подняты подъемная пл атформа 57 опущена, поддерживающая плита 6 находится в кранем переднем положении и соединена с кронштейном 62 суппорта 5 посредством фиксатора 59.
Трубная плеть 66 подается на заданный размер в ручьи нижних полушаблонов 9 и 45, после чего одновременным включением цилиндров 27 и 50 осуществляется смыкание полушаб- лонов, а включением прижимов 54 и 55 - зажим изгибаемой части трубной плети.
Одновременным включением гидродвигателей 63 и 64 осуществляется перемещение вправо каретки 4 по направляющим 2 и суппорта 5 по направляющим 3, при этом обоймы 10 и 46 поворачиваются вокруг осей-полушаблонов 9 и 45, щестерня 23, обкатываясь вокруг шестерни 13, передает вращение посредством шестерен 21, 20, 22 шестерне 11, вокруг которой обкатывается зубчатая рейка 12, величина хода которой определяет величину сближения центров шаблонов гибочных головок 8 и 44, обеспечивая гибкуплети наматыванием одновременно на два щаблона. Необходимым условием данного метода гибки является зависимость между величиной сближения центров шаблонов и величиной суммы дуг формообразуемых ги- бов, зависящей от радиусов шаблонов при изменении радиусов шаблонов необходимо соответствующим образом изменять и величину сближения шаблонов, так как в противном случае произойдет деформирование изгибаемого участка плети} аналитическая связь между радиусами шаблонов и величиной сближения шаблонов определяется зависимостью RU, (R( + Ry - радиус обкатываемой шестерни 11 R , и RJ - радиусы шаблонов, i - передаточное отношение механизма 15 изменения радиуса гибки. Процесс гибки продолжается до формообразования гнутых участков на 90° (фиг.9), после чего гидродвигатели 63, 64 и прижим 55 выключают.
Включением цилиндра 48 (на втягивание штока) осуществляется расфик- сация рейки 12 с рбоймой 46. Включением гидродвигателя 64 перемещают суппорт 5 вперед на величину прямого участка формируемого П-образного элемента (фиг.10), после чего включением цилиндра 48 на обратный ход осуществляется фиксация рейки 12.
0 Для выполнения второго рабочего хода участок формообразуемого П-образного элемента необходимо зафиксировать механизмом фиксации 52 суппорта, для чего включением цилинд5 ра 32 (на выталкивание штока) ползун 31 совместно с ползушкой 34 и зажимными губками 37 и 38 опускается вниз (фиг.6). При контакте пол- зушки с упором 42 зажимные губки вы0 ходят из позиции фиксации трубы; при дальнейшем движении ползуна 31 вниз пружина 35 сжимается, а под воздействием роликов 40 губки 37 и 38 зажимают трубу, преодолевая уси5 лие пружины 39.
Одновременным включением гидродвигателей 63 и 64 осуществляется дальнейшее перемещение каретки 4 вправо и суппорта 5 вперед и, сле0 довательно, формообразование первого участка змеевика, включающего од- ноколенный-и П-образный элементы (фиг.11); на этом заканчивается пгi - вый цикл формообразования змееви ...
Для выполнения последующего р . бочего цикла необходимо все меха 13- мы станка возвратить в исходное пело-, жение и произвести следующие операции. Осуществляют включение ма 54 и включение цилиндра 32 на сб- ратный ход, при этом ролики 40,поднимаясь вместе с ползуном 31, освобождают зажимные губки 37 и 38, которые разжимаются под действием пружины 39 и расфиксируют трубу. При дальнейшем перемещении вверх ползун 31 своим упором 43 воздействует на ползушку 34 и поднимает, ее, выводя зажимньшгубки из зоны фиксации.
0 Включением цилиндров 27 и 50 верхние полушаблоны 28 и 51 поднимаются, включением цилиндра 60 осуществляется расфиксация плиты 6 и кронштейна 62 и поъем платформы 57, поддерживающей сформированную часть змеевика.
Включением цилиндра 48 осуществляется расфиксация рейки 12 с обой5
0
5
51
мой .46.1 Включением гидродвигателя 63 перемещают каретку 4 вправо на величину прямого участка П-образного элемента, после чего включением цилиндра 48 на обратный ход фиксируют рейку 12 с обоймом 46.
Одновременным включением гидродвигателей 63 и 64 осуществляется возврат каретки и суппорта в исходное положение (фиг.12). Включением цилиндра 60 (на выталкивание штока) осуществляется фиксация плиты 6 с
075626
кронштейном 62 суппорта 5 и опускание платформы 57.
Для выполнения второго -и последующих циклов формообразования зме- 5 евика все вышеуказанные операции повторяются в аналагочной последовательности.
Использование указанных механизмов в совокупности обеспечивает из- 10 готовление змеевиков сложной геометрической конфигурации, и, таким образом,позволяет существенно расширить технологические возможности станка.
J HI ЧВ
(риг,2
А-А
28
Б(pu«.J
фуг. V
в-в
фиъ.5
2S
;J x/:$:-flP
фик,$
5
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
| Станок для гибки змеевиков | 1986 |
|
SU1411075A1 |
| Станок для гибки змеевиков | 1985 |
|
SU1333437A2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ СЛОЖНОЙ ФОРМЫ ИЗ ДЛИННОМЕРНЫХ ТРУБНЫХ ПЛЕТЕЙ И ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2038886C1 |
| Станок для гибки змеевиков | 1985 |
|
SU1400711A1 |
| Станок для гибки змеевиков | 1980 |
|
SU935162A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Станок для изготовления змеевиков | 1980 |
|
SU863072A1 |
| Станок для гибки змеевиков | 1985 |
|
SU1248692A1 |
| Станок для загибки и отрезки концов трубных спиралей | 1981 |
|
SU986541A1 |
8
cpuz.B
55
фиг. 9
5
VV
5
фи.Ю 29
(риг. 7/В
ntZ:
QOtfC.f7
с:
фи.;
| Станок для гибки змеевиков | 1980 |
|
SU935162A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
