(54) МЕХАНИЗМ ОВРАБОТКИ БОРТА К СТАНКУ
ДЛЯ СБОРКИ ПОКРЫШЕК ПНЕВМАТИЧЕСКИХ ШИН
. Поставленная цель достигается тем, что в механизме обработки бортгл к станку для сборки покрышек пневматических шин, содержащем корпус с пр1шодом его перемещения, подвижнйй в осевом направлении шаблон, соединенный со штоком силового цилиндргг, систему заворотных рычагов, имекш.их на одном плече ролики, взаимодейстцующие с Т-образными пазами кольца, связанного с поршнем силового цилиндра, и систему обжимных рычагов, также имеющих на одном плече ролики, взаимодействующие с Тобразными пазами второго кольца, соединенного с поршнем второго силового цилиндра и средства для согласования работы цилиндров, рабочие полости силовых цилиндров систем обжимных и заворотных рычагов связаны между собой посредством трубопроводов, на которых установлены средства для согласования работы цилиндров.
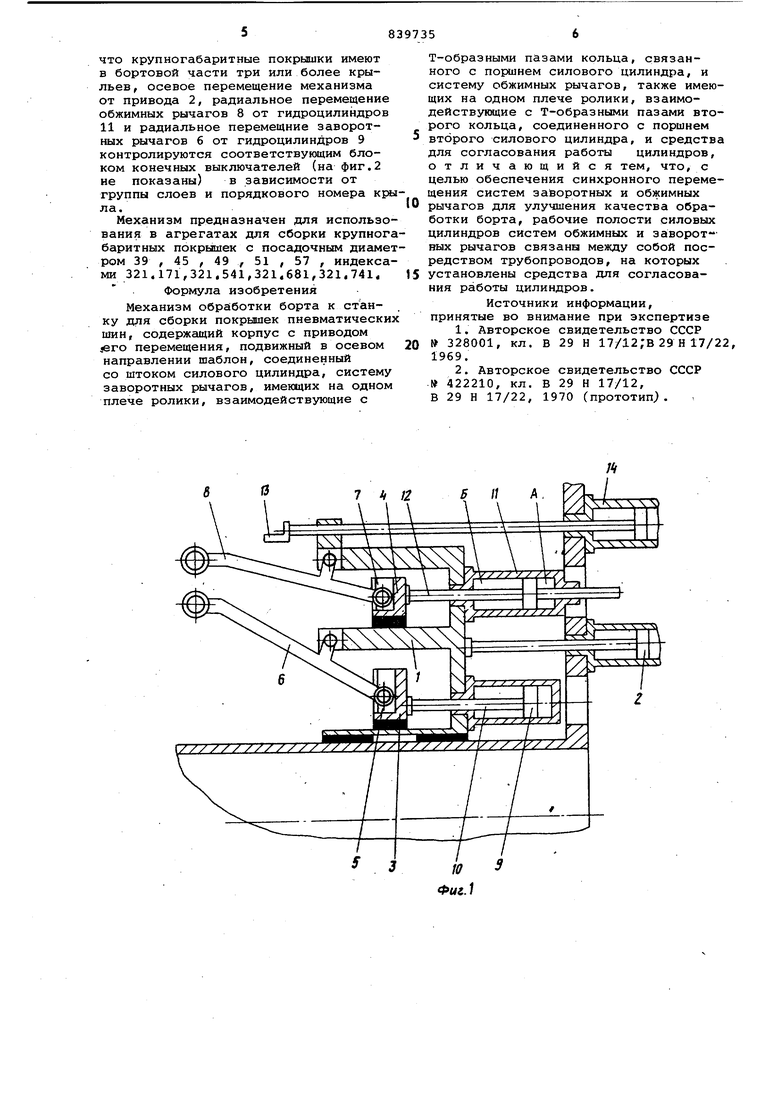
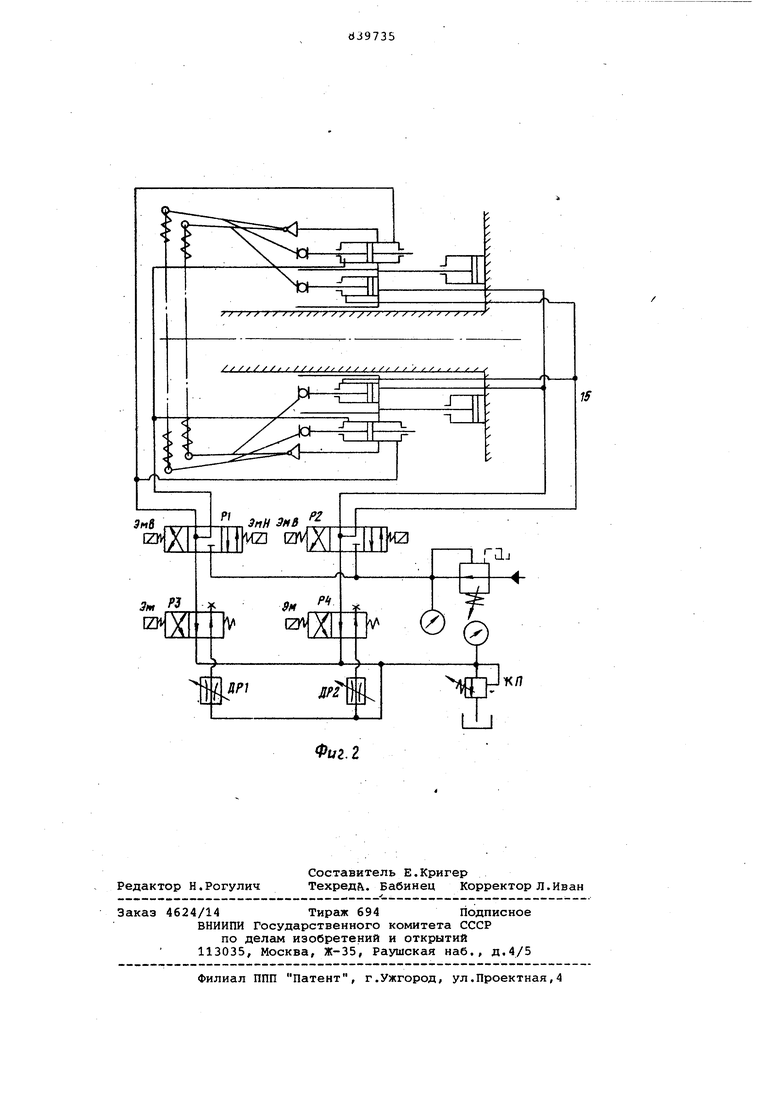
На фиг.1 изображен предлагаемый механизм, общий вид; на фиг.2 - гидрокинематическая схема механизма.
Механизм обработки борта содержит корпус 1 с приводом 2 его осевого перемещения. Внутри корпуса 1 имеются я:,ва подвижных кольца 3 и 4. Кольцо 3 кинематически связано через Т-образные пазы 5 с заворотными рьиагами б, а кольцо 4 через Т-образные пазы 7 - с обжимными рычагами 8. Заворотные и обжимные рычаги б и 8 заведены в пазы корпуса 1,
На корпусе 1 Зс креплены силовые гидроцилиндры 9, штоки 10 которых связаны с подвижным кольцом 3, и силовые гидроцилиндры 11, штоки 12 11:оторых сБязгяны с подвижным кольцом 4. На корпусе 1 смонтирован также шаблон 13 для посадки крыльев, имеющий привод 14 его осевого перемещения.
Для функционального взаимодействия обжимных и заворотных рычагов рабочие полости силозых гидроци; линдров 9 и 11 связаны между собой посредством трубопровода 15, на котором установлены средства для согласовсЗгГия работы гидроцилиндров 9 и 11, состоящие из гидрораспределителек Р1 с э.лектроМагнитами ЭмБ и ЭмН и РЗ с электромагнитом Эм, предназначенных для управления работой гидроцилинлоой 11, гидрораспеделителей р2 с электромагнитами ЭмВ и ЭмН и Р4 с электромагнитом Эм, предназначенных для управления работой гидроцилиндров 9, дросселей ДР1 и ДР2.предназначенных для регулирования скорости перемещения штокой гидроцилиндров, а следовательно и скорости движения рычагов, редукционного клапана КР
предназначенного для регулирования усилий, создаваемых рычагами, за счет регулировки давления маслав системе, подпорного клапана КП, обеспечивающего плавность движения рычагов.
Механизм обработки борта работает следующим образом.
Перед обжатием слоев корда по заплечикам барабана (от наружного диаметра сборочного барабана до
0 внутреннего диаметра крыла) механизм обработки борта подводится приводом 2 в рабочее положение. Включением электромагнита ЭмВ гидрораспределителя Р1 подается давление в полости А гидроцилиндров 11, в результате чего обжимные рычаги 8, взаимодействуя с кольцом 4, раскрываются для обжатия слоев корда. Включением электромагнита ЭмВ гидрораспреQ делителя Р2 подается давление во внештоковые полости, гидроцилиндра 9, в результате чего затворные рычаги, взаимодействуя с кольцом 3, раскрываются до соприкосновения с внутренней поверхностью слоев корда.
Затем включением электромагнита ЭмН гидрораспределителя Р1 и электромагнита Эм гидрораспределителя РЗ (гидрораспределитель Р2 при этом в нейтральном положении), подающего давление в полости Б гидроцилиндров 11, в результате чего обжимные рычаги .8 начинают опускаться, зажимая корд между заворотными и обжимными рычагами. Опускаясь далее, обжимные рычаги опускают заворотные рычаги, а корд обжимается по (Заплечикам сборочного барабана до внутреннего диаметра крыла. Скорость ,движения обжимных рычагов регулируется дросселем ДР1.
После обжатия слоев корда по заплечикам барабана перемещением шаблона 13 от привода 14 производится посадка крыла в борт покрышки, после
5 чего шаблон отводится в исходное
положение. Затем включением электромагнита ЭмВ гидрораспределителя Р2 и электромагнита Эм гидрораспределителя Р4 (гидрораспределитель Pi при
Q этом в нейтральном положении) подается давление в штоковые полости гидроцилиндров 9, отчего заворотные рычаги б, взаимодействуя с обжимными рычагами 8, раскрываются производя заворот слоев корда на крыло. Скорость раскрытия рычагов регулируется дрос- селем ДР2.
После заворота слоев корда на крыло рычаги б и 8 с помощБю своих приводов 9 и 1.1 соответственно выводятся в исходное положение, а затем
механизм обработки борта в целом отводится .в исходное положение.
При обработке следующих групп слоев корда операции повторяются в той же
5 последовательности, в связи с тем. что крупногабаритные покрышки имеют в бортовой части три или более крыльев, осевое перемещение механизма от привода 2, радиальное перемещение обжимных рычагов 8 от гидроцилиндров 11 и радиальное перемещние заворотных рычагов 6 от гидроцилиндров 9 контролируются соответствующим блоком конечных выключателей (на фиг,2 не показаны) в зависимости от группы слоев и порядкового номера кры ла. Механизм предназначен для использования в агрегатах для сборки крупнога баритных покрышек с посащочным дигилет ром 39 , 45 , 49 ., 51 , 57 , индексами 321.171,321.541,321.681,321,741, Формула изобретения Механизм обработки борта к станку для сборки покрышек пневматических шин, содержащий корпус с приводом jero перемещения, подвижный в осевом направлении шаблон, соединенный со штоком силового цилиндра, систему заворотных рычагов, имеющих на одном плече ролики, взаимодействующие с Т-образными пазами кольца, связанного с поршнем силового цилиндра, и систему обжимных рычагов, также имеющих на одном плече ролики, взаимодействующие с Т-образными пазами второго кольца, соединенного с поршнем второго силового цилиндра, и средства для согласования работы цилиндров, отличающийся тем, что, с целью обеспечения синхронного перемещения систем заворотных и обжимных рычагов для улучшения качества обработки борта, рабочие полости силовых цилиндров систем обжимных и заворот- вых рычагов связаны между собой посредством трубопроводов, на которых установлены средства для согласования работы цилиндров. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 328001, кл. В 29 Н 17/12;в 29Н17/22, 1969. 2.Авторское свидетельство СССР 422210, кл. В 29 Н 17/12, В 29 Н 17/22, 1970 (прототип}.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для обработки борта к станку для сборки покрышек пневматических шин | 1978 |
|
SU718293A1 |
| Механизм обработки борта к станку для сборки покрышек пневматических шин | 1979 |
|
SU851867A1 |
| Механизм обработки борта к станку для сборки покрышек пневматических шин | 1975 |
|
SU546495A1 |
| МЕХАНИЗМ ФОРМИРОВАНИЯ БОРТА ПОКРЫШЕК ПНЕВМАТИЧЕСКИХ ШИН | 1993 |
|
RU2069150C1 |
| Механизм обработки борта к станку для сборки покрышек пневматических шин | 1983 |
|
SU1087367A1 |
| Механизм обработки борта к станкудля СбОРКи пОКРышЕК пНЕВМАТичЕСКиХшиН | 1979 |
|
SU844367A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ БОРТА ПОКРЫШЕК ПНЕВМАТИЧЕСКИХ ШИН | 1993 |
|
RU2051039C1 |
| Механизм обработки борта к станку для сборки покрышек пневматических шин | 1980 |
|
SU912535A1 |
| МЕХАНИЗМ ДЛЯ ФОРМИРОВАНИЯ БОРТА | 1985 |
|
SU1471436A1 |
| Механизм обработки борта к станку для сборки покрышек пневматических шин | 1984 |
|
SU1154107A1 |
I2
Фиг. 2
кл
