(54) .СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления электроприводом | 1981 |
|
SU995064A2 |
| Устройство управления летучими ножницами | 1985 |
|
SU1304994A1 |
| Устройство для управления приводом | 1978 |
|
SU796794A1 |
| Система управления приводом летучих ножниц | 1984 |
|
SU1260121A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1385216A1 |
| Позиционный электропривод | 1984 |
|
SU1228210A1 |
| Позиционный электропривод | 1990 |
|
SU1778904A1 |
| Позиционный электропривод постоянного тока | 1981 |
|
SU1072223A1 |
| Устройство для управления электродвигателем позиционного электропривода | 1985 |
|
SU1307523A1 |
| Электропривод постоянного тока | 1976 |
|
SU657554A1 |
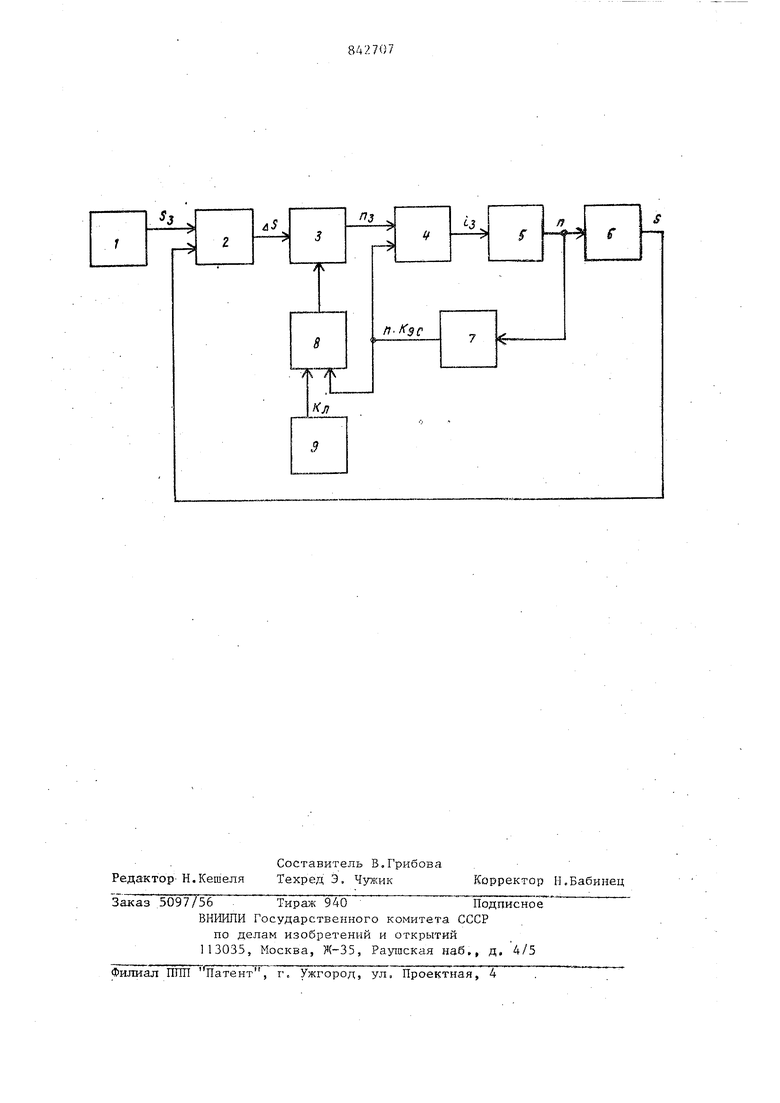
Изобретение относится к автомати ческому управлению и регулированию электропривода и предназначено для установки механизма в заданное поло жение. Известен способ автоматического замедления движущегося элемента до нулевой скорости и устройство для е осуществления, используемые в сиетемах цифрового управления, действующих по принципу итерационного пр ближения Til. Однако в устройстве осугдествляется ступенчатое изменение скорости в процессе торможения, что увеличивает время торможения и снижает точ ность позиционирования. Известно устройство, в котором при торможении привода корректирует интенсивность торможения на основе койтроля скорости в фиксированных точках Г23. Однако при переменных значениях заданных перемещений в указанной сиётеме потребуется значительное количество фиксирующих датчиков положенйя, что приведет к усложнению системы. Наиболее близкой к предлагаемой является позиционная система, содержащая электропривод, выход которого через датчик скорости подключен к регулятору скорости, а через датчик .положения - к регулятору положения, второй вход которого подсоединен к задатчику, а выход регулятора скорости подключен ко входу электропривода. Регулятор положения может вьтолняться как линейным, так не- . линейньм. Характеристика нелинейного регулятора представляет собой параболическую зависимость, аппрок.симированную участками ломанной линии и реализованную путем включения в цепь обратной связи регулятора положения функционального преобразователя Гз1. Недостатком устройства в случае применения линейного регулятора поло жения является неудовлетворительное качество торможения при различных заданных перемещениях, а применение регулятора положения с параболическо характеристикой не обеспечивает постоянство замедления электропривода в процессе торможения из-за наличия колебаний тока д6игaтeлЯj вызванных изломами аппроксимированной характеристики регулятора положения. Цель изобретения - повьшение быст родействия и точности системы. Указанная цель достигается тем, что в систему введены последовательн соединенные источник опорного сигнала, блок вьщеления максимума и делительное устройство, второй вход ко торого подключен к выходу регулятора положения, а выход - ко второму входу регулятора скорости, второй вход блока выделения максимума соединен с выходом Датчика скорости. На чертеже приведена функциональная схема предлагаемой системы,управ ления электро-привода. Система содержит задатник 1 для ввода величины заданного положения механизма S-j, регулятор 2 положения для вычисления разности Л S между заданным S 9, и фактическимЛЯ положением механизма, а также для ограничения этой разности до значения 4 , соот- ,вётствующего максимальному значению скорости перемещения механизма. Де1- -- „ о лительное устройство .о служит для де ления рассогласования по пути ЛS на величину, пропорциональную скорости электропривода либо на постоянную величину. В систему входят регулятор 1 скорости для регулирования скорости электропривода и ограничен ния максимального тока двигателя, а также электропривод 5 для установки механизма в заданное положение, сод жащий подчиненный- регулятор тока, у литель мощности и электродвигатель. Для измерения величины перемещения механизма относительно точки, принятой за начало отсчета служит датчик б положения, а для измерения ск рости электропривода - датчик 7 ско рости. Блок 8 вьщеления ма,ксимума предназначен для выделения большей -из двух величин, поступающих на его входы: величины, пропорциональной скорости электропривода и величины 74 расчетного коэффициента Кд, а источник 9 опорного сигнала - для ввода величины расчетного коэффициента Кд. Система работает следующим образом. С выхода задатчика 1 сигнал заданного положения механизма Sa подается на первый вход регулятора положения 2. На выходе регулятора положения возникает сигнал рассогласования , если (, или ,,, если Sf(. Сигнал Д5 поступает на вход делимого делительного устройства 3. Так как в начальный момент скорость электропривода равна нулю, на вход делителя де ггительного устройства 3 с выхода, блока вьоделения максимума8 подается сигнал Кд. При этом на выходе делительного устройства 3 возникает сигнал п - зс-йе к7 где масштабньй коэффициент. Этот сигнал подается на первый вход регулятора 4 скорости. На выходе регулятора 4 скорости возникает сигнал iо,.непревышающий некоторого максимального значения Ц который подается на вход подчиненного регулятора тока электропривода 5. В результате этого двигатель электропривода начинает разгоняться с темпом, определяемым величиной сигнала i а на выходе датчика 7 скорости возникает сиг- . нал К, .-п, где Кд-- коэффициент передачи датчика 7 скорости, п.- скорость электропривода. С момента времени, когда сигнал К станет меньше величины , выход- ной сигнал делительного устройства 3 Определяется выражением , В процессе разгона электропривода его скорость п увеличивается, а величина рассогласования по пути 4 5 згменьшается. При достаточно высоком коэффициент усиления регулятора 4 скорости можно считать, .что к моменту Окончания процесса разгона электропривода и при его движении на участке торможения имеет место равенства сигналов задания и обратной связи на входах регулятора А скорости. При этом Решая совместно (2) и (З), получи no, -Vi4c7 s Из выражения (4) -видно, что сигнал задания скорости электропривода п„ плавно изменяется на участке торможения по параболическому закону в функции величины рассогласования по пути Л S, Приэтом скорость электропривода изменяется линейно во времени с постоянным заданным замедлением Такой процесс .торможения продолжается до тех пор, пока сигнал на выходе датчика 7 скорости не станет меньше сигнала Кд. С этого момента времени величина сигнала.задания скорости n-j определяется выражением (1), соответствующим линейному закону изменения сигнала n-j в функции величины рассогласования по путиДЗ. При достижении величиной S значения, равного S, величина рассогласования Д S становится равной нулю и электропривод останавливается Отработка больших перемещений отличается от известной наличием участ ка движения электропривода с максимальной скоростью, определяемой выра жением п м 1/ Значение расчетного коэффициента Кд,влияющего на переходный процесс в конце отработки заданного перемещени определяется в соответствии с извест ными принципами настройки регулятовров в системах подчиненного регули рования. Таким -образом, система обеспечивает высокое быстродействие- и точность позиционирования. Экономический эффект от применения такой системы зависит от назначения электропривода и может достигать, например в металлургии, десятков тысяч рублей. Формула изобретения Система управления электроприв.одом, содержащая электропривод, выход которого через датчик скорости подключен к регулятору скорости, а через датчик положения - к регулятору положения, второй вход которого подсоединен к задатчику, а выход регулятора скорости подключен ко входу электропривода, отличающаяся тем, что, с целью повышения быстродействия и точности системы, она.,. содержит последовательно соединенные источник опорного сигнала, блок вьоделения максимума и делительное устройствоJ второй вход которого подключен к регулятора положения, а выход - ко второму входу регулятора .скорости, второй вход блока вьщеления максимума соединен с выходом датчика скорости. .Источники информации, принятые во внимание при экспертизе 1-.. Патент США № 3365634, кл. кл. G 05 В 11/26, опублик. 1975. 2. Авторское свидетельство СССР №.559219, кл. G 05 В 11/01, 1975. 3. Лебедев Е.Д., Неймарк B.E.j Пистрак М.Я,, Спежановский О.В. Управление вентильными электроприводами постоянного тока. М., Энергия, 1970, с. 83-94.
